通过远程控制模块,可以对已创建的任务执行远程控制。
此模块可在管理员级别运行。
菜单布局
|
|
Item |
Description |
|---|---|---|
|
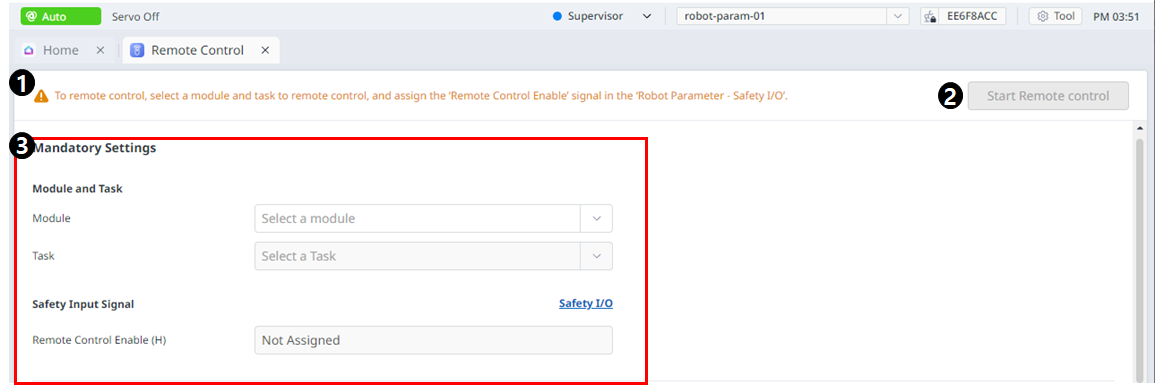
1. |
Warning |
这将显示使用模块时的必要预防措施。 |
|
2. |
Start Remote Control |
此按钮允许您在完成所有设置后启动远程控制。 |
|
3. |
Mandatory Settings |
这是远程控制的强制设置。 您可以设置模块和任务以及设置安全输入信号。 |
|
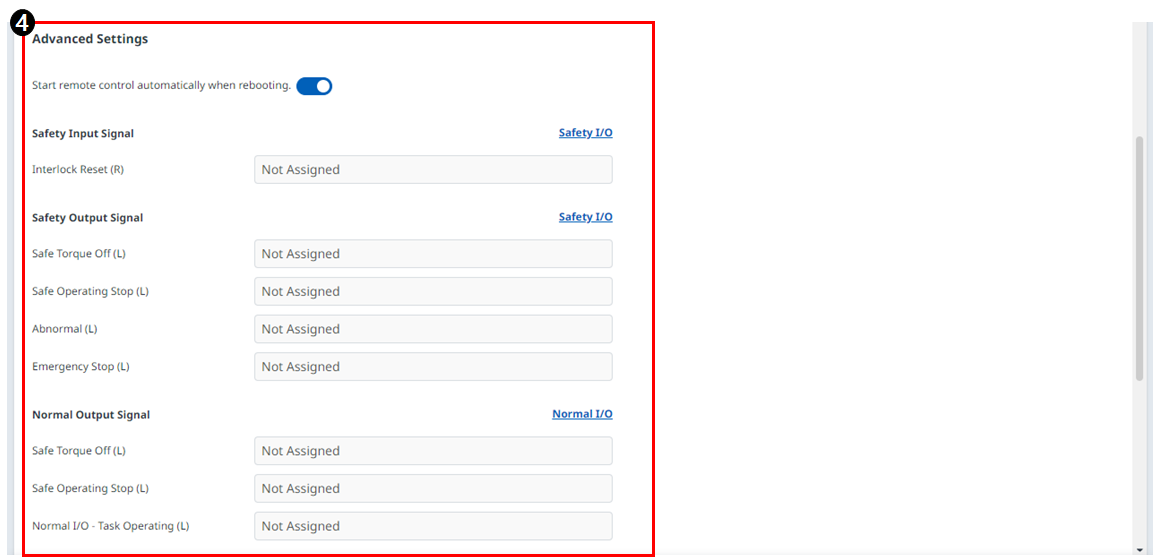
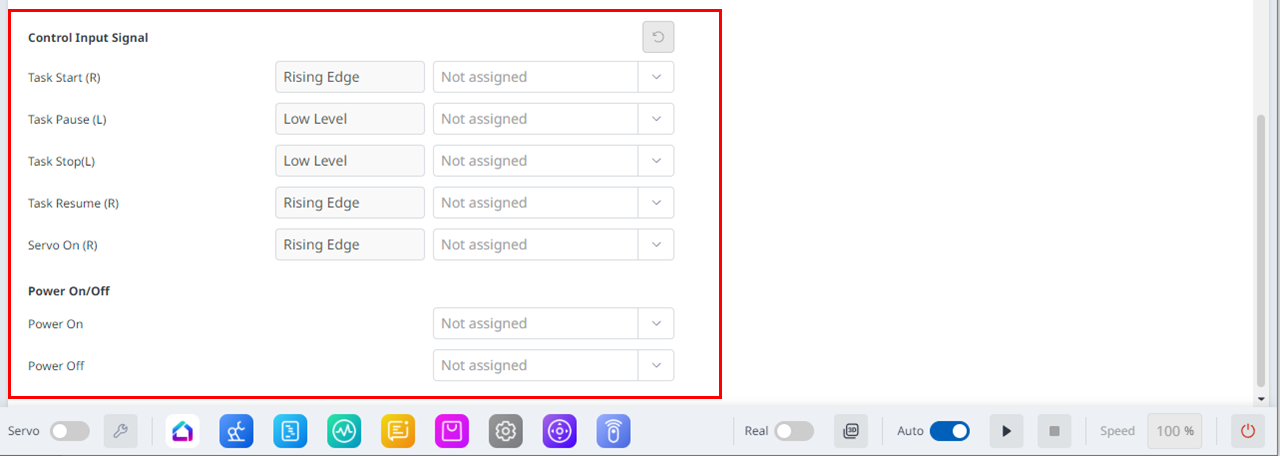
4. |
Advanced Settings |
这允许进行远程控制的高级设置。 您可以将任务的每个端口设置为启动/暂停/停止/恢复/伺服打开。 如果远程控制设置为在重新启动后自动运行,则它将在Dart-Platform重新启动后立即运行。 |
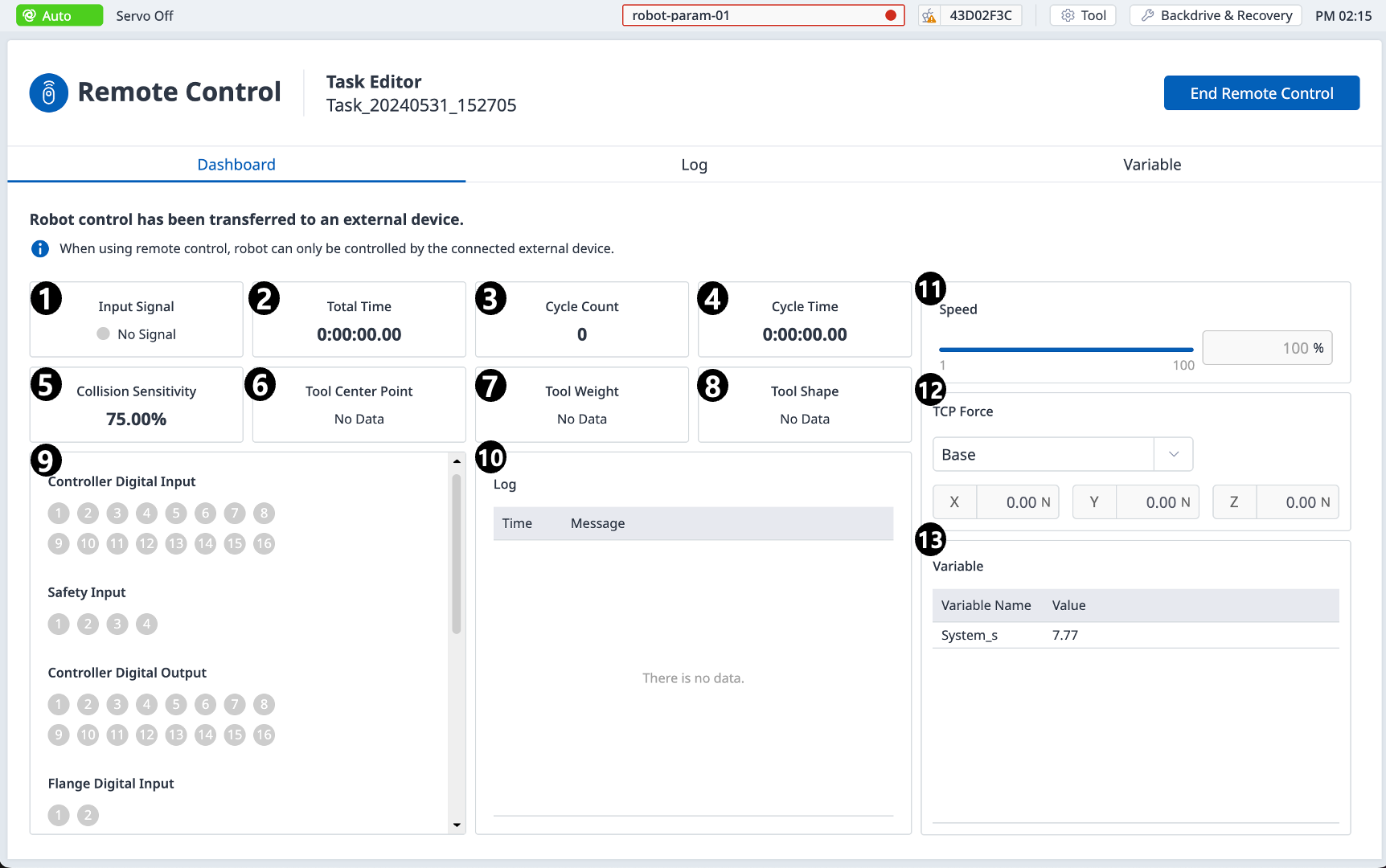
启动远程控制后,即可进入远程控制模式画面。
Dashboard
|
|
Item |
Description |
|---|---|---|
|
1 |
Input Signal |
在安全输入/输出中设置的安全输入信号项目中,接收并显示远程控制激活信号。 |
|
2 |
Total Time |
显示执行任务的时间。 |
|
3 |
Cycle Count |
显示任务的重复次数。 |
|
4 |
Cycle Time |
显示任务的一个循环时间。 |
|
5 |
Collision Sensitivity |
显示碰撞灵敏度值。如果在区域内,则显示在该区域设置的冲击灵敏度值。如果在区域外,则显示机器人限制中设置的碰撞灵敏度值。 |
|
6 |
Tool Center Point |
显示任务中指定的工具中心点。 |
|
7 |
Tool Weight |
显示任务中指定的工具重量。 |
|
8 |
Tool Shape |
显示任务中指定的工具形状。 |
|
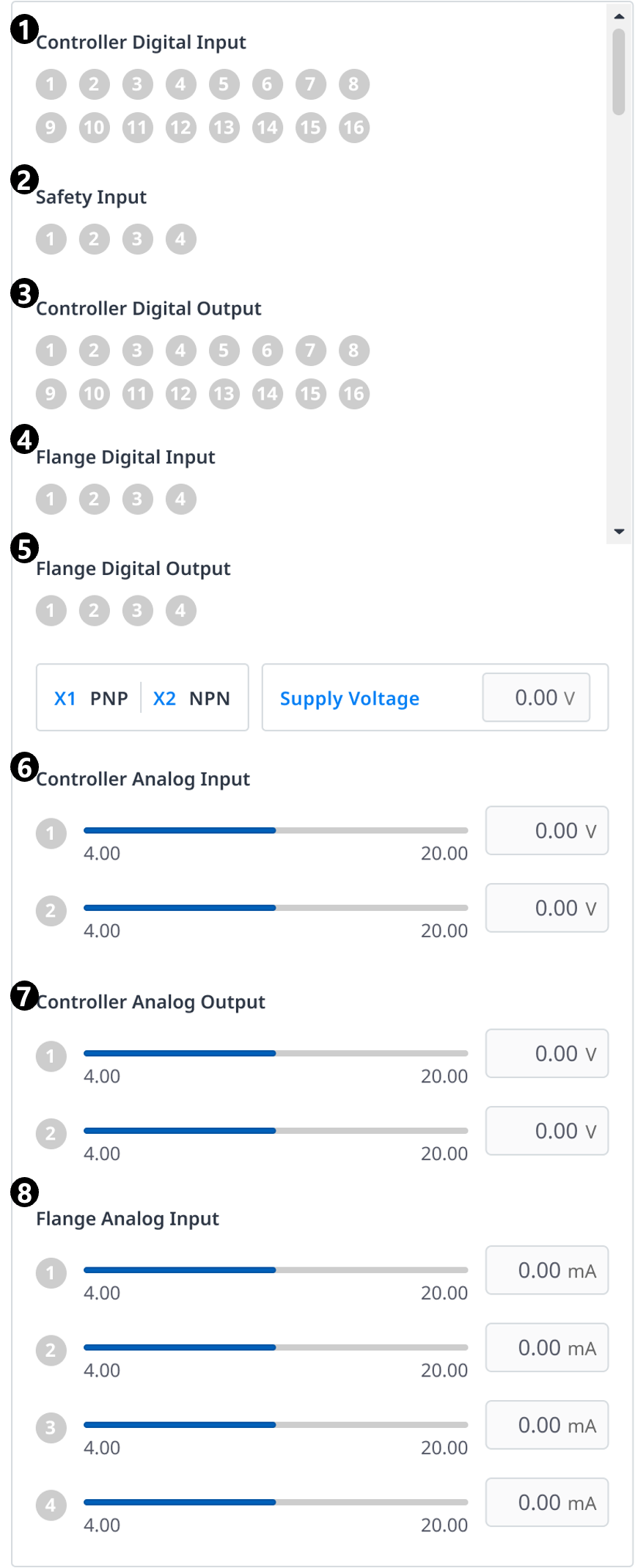
9 |
Signal Input/Output |
显示相应的信号输入/输出值。 |
|
10 |
Log |
显示系统日志信息。 |
|
11 |
Speed |
您可以设置任务的速度。 |
|
12 |
TCP Force |
实时显示施加到 TCP 的力。 |
|
13 |
Variable |
显示正在运行的任务使用的变量值。 |
|
|
Item |
Description |
|---|---|---|
|
1 |
Controller Digital Input |
显示控制器数字输入设置。 |
|
2 |
Safety Input |
显示控制器安全输入设置。 |
|
3 |
Controller Digital Output |
显示控制器控制器数字输出设置。 |
|
4 |
Flange Digital Input |
显示法兰数字输入设置。 |
|
5 |
Flange Digital Output |
显示法兰数字输出设置。 |
|
6 |
Controller Analog Input |
显示控制器模拟输入设置。 |
|
7 |
Controller Analog Output |
显示控制器模拟输出设置。 |
|
8 |
Flange Analog Input |
显示法兰模拟输入设置 |
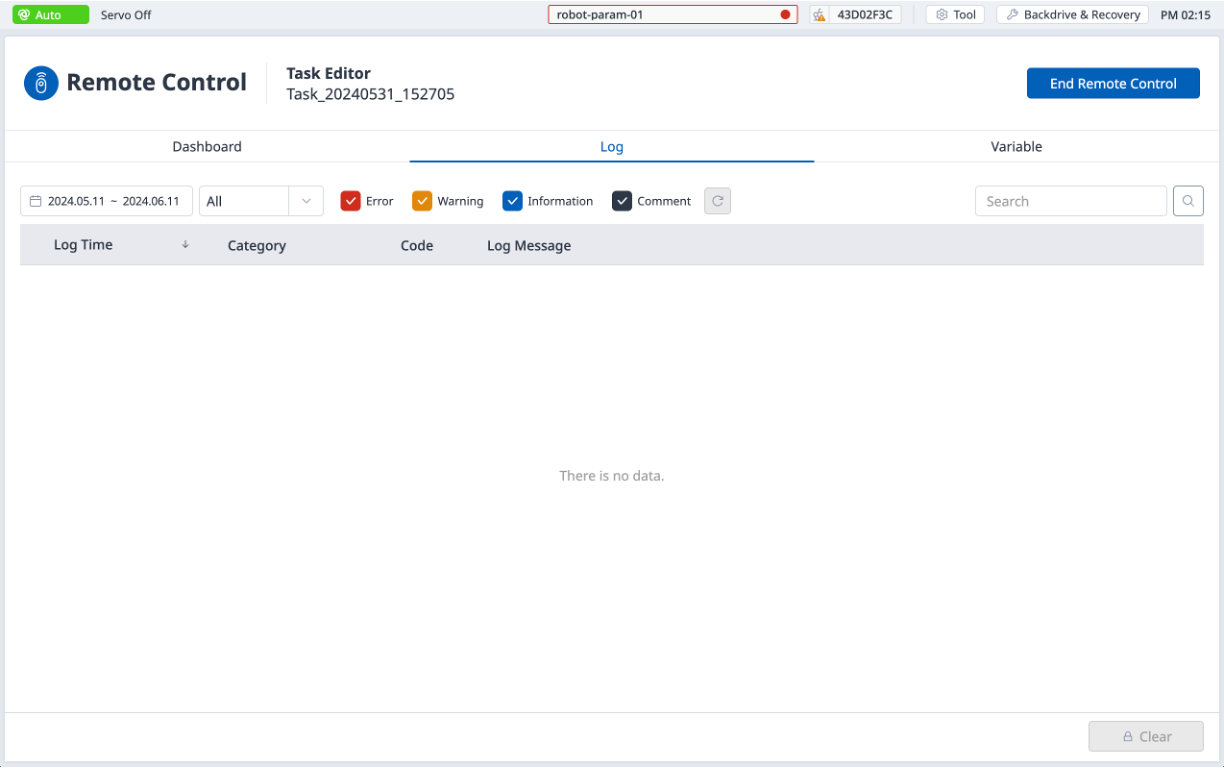
日志
显示系统日志信息。
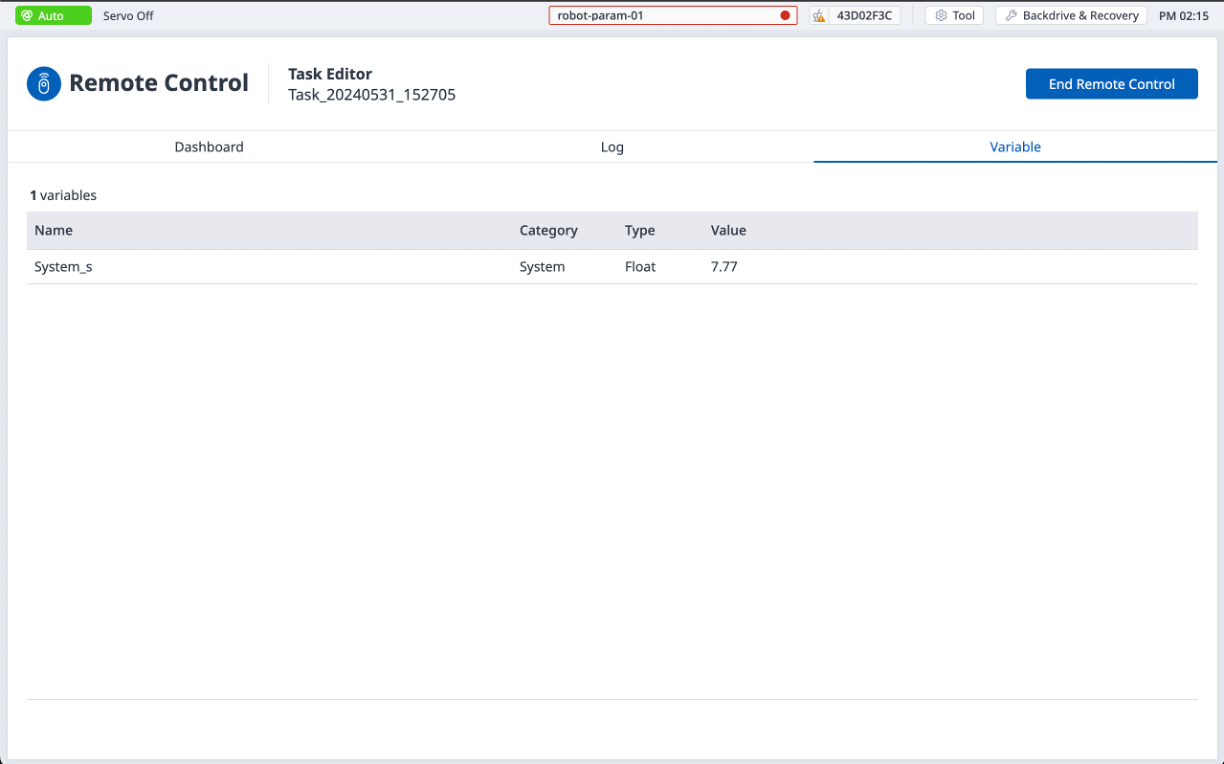
变量
显示正在运行的任务使用的变量值。