用户可以从转折标签中选择手动移动方法。
-
慢跑:它将机械手接头或TCP移动到用户选择的接头轴或坐标轴上
-
移动:它将机械手接头或TCP移动到用户输入的目标点
机械手移动包括两种类型。
-
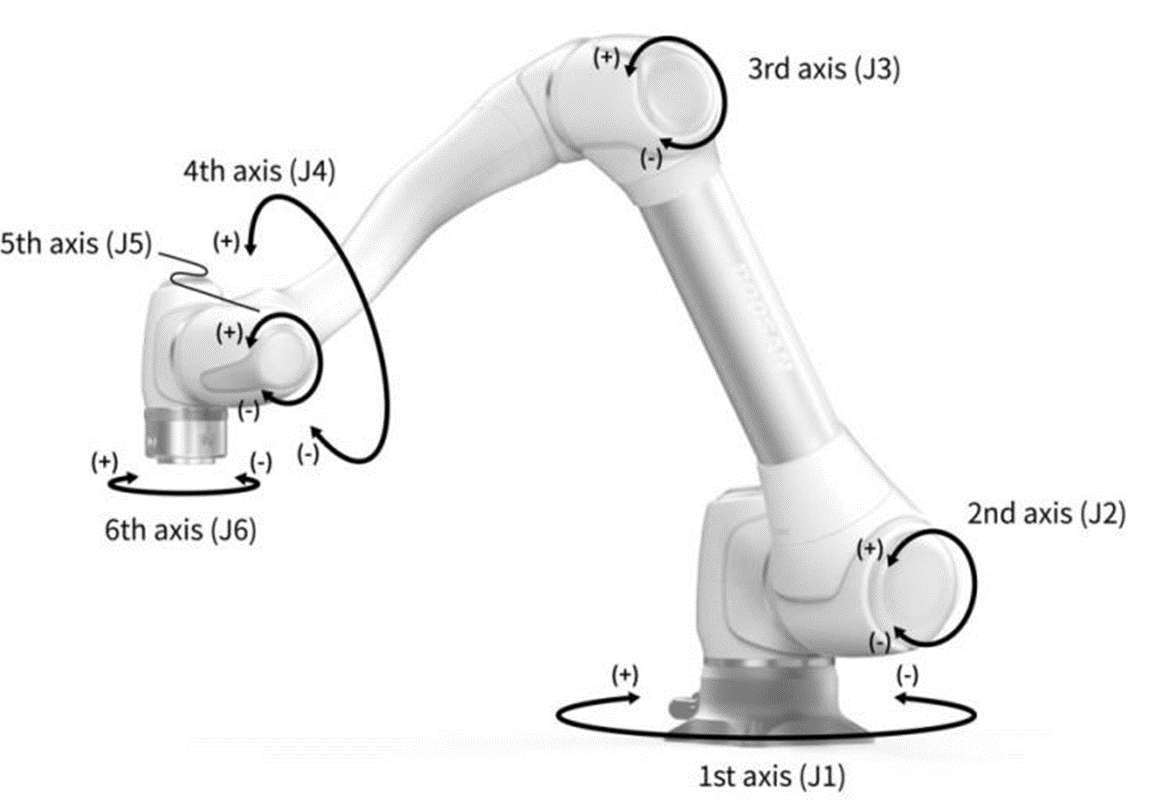
接头运动:它以旋转运动线性移动每个接头
-
任务运动:它将结束线性移动到目标点
以下是如何使用点动屏幕中的接合运动来移动机械手的方法:
-
选择接合选项卡。
-
选择要移动的轴。例如,您可以选择J1.
-
按下+/-按钮以移动机械手。按下+/-按钮时机械手移动,当前位置实时显示在屏幕上。
以下是在点动屏幕上使用任务运动移动机械手的方法:
-
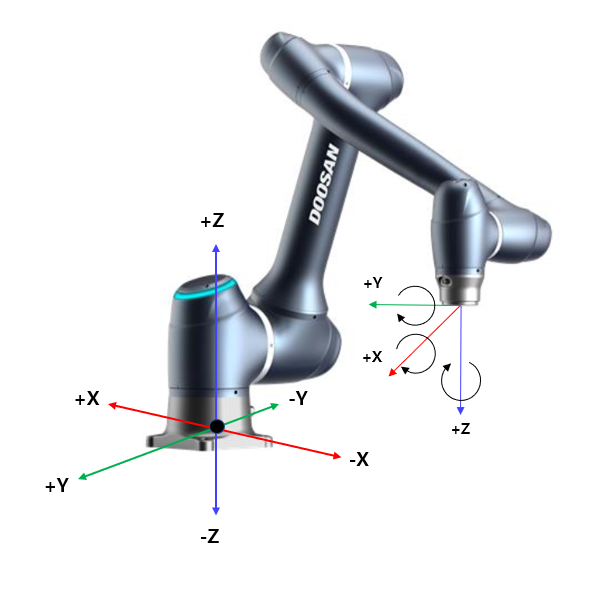
选择基体坐标。可以根据基准坐标或刀具坐标移动机械手。
-
选择要移动的方向。例如,可以选择X轴。
-
按下+/-按钮以移动机械手。按下+/-按钮时机械手移动,当前位置实时显示在屏幕上。
有关点动移动,移动和对齐的更多信息, 点动屏幕 移动屏幕 请分别参阅,和。
-
如果Jog屏幕左上角的Actual (实际)模式切换开关关闭,机械手仅在Jog屏幕左侧的虚拟屏幕上移动。如果打开实际模式切换开关,实际机械手将移动。
使用Jog Plus 模块,用户可以在手动模式下探索整个工作空间,或 将 操作空间设置为 机器人 操作空间。每个轴的移动角度 可以根据 所选的操作空间和安全设置的接合角度限制来限制。
要使用Jog Plus功能,请轻触 主菜单上的Jog Plus Module(Jog Plus模块)。
-
在伺服关闭期间不能使用转折功能。
-
在 Jog Plus屏幕中手动操作机械手,因此机械手仅在按下Jog按钮时移动。
-
可以根据Jog Plus选项卡屏幕上的当前位置移动机械手。
-
通过在Move (移动)选项卡屏幕上配置目标角度/坐标,可以移动机械手。
-
可以 在 Jog Plus选项卡屏幕上配置参考坐标,并将选项卡屏幕作为连接或任务进行移动。
-
如果 机械手由于位于Jog Plus模式的操作空间以外的空间而无法导航,请将机械手操作空间设置为 "None"(无),以便导航机械手。
此模块在自动模式下不可用。轻触右下角的切换按钮可在手动模式下使用。
使用作业加载(JOG+)可让您在执行不同工作时同时使用转折功能。在教学过程中需要手动控制以将机械手移动到目标点时,可以使用此功能。
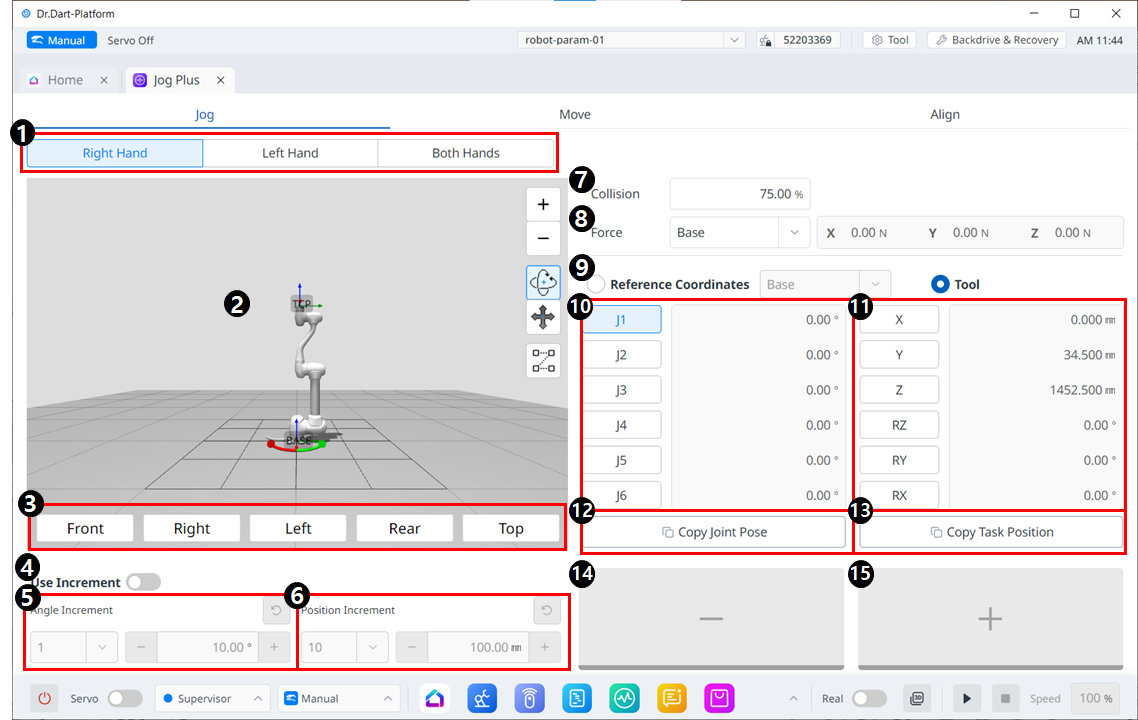
导航菜单布局
|
|
物品 |
描述 |
|---|---|---|
|
1 |
选择面板类型 |
您可以选择移动按钮的位置。 |
|
2 |
3D模拟 |
这是 3D 查看器,您可以在其中看到机器人的外观。 |
|
3 |
模拟器对准 |
您可以利用此部分来操纵模拟器。 |
|
4 |
使用增量 |
此按钮允许您启用角度或位置增量。 |
|
5 |
角度增量 |
此部分是设置所选轴上的角度增量的位置。 |
|
6 |
持仓增量 |
此部分是设置所选轴上的位置增量的位置。 |
|
7 |
碰撞 |
该字段是您设置机器人碰撞的地方。 |
|
8 |
力监测 |
在此部分中,您可以根据基础、工具、世界、参考等设置 X、Y 和 Z 轴上的力。 |
|
9 |
选择参考坐标系 |
选择参考坐标系来显示或点动图 11 中的任务坐标。它可以是基础坐标、世界坐标或用户坐标。 |
|
10 |
接缝板 |
您可以选择要点动的关节轴。 |
|
11 |
任务面板 |
您可以选择要点动的任务轴。 |
|
12 |
复制姿势 J 按钮 |
此按钮允许您复制姿势 J。 |
|
13 |
复制姿势 X 按钮 |
此按钮允许您复制姿势 X。 |
|
14 |
移动 - 按钮 |
您可以让机器人根据每个轴向 - 方向移动。 此时,您可以在左侧的 3D 模拟中找出 - 和 + 的方向。 |
|
15 |
移动+按钮 |
您可以让机器人根据每个轴向 + 方向移动。 此时,您可以在左侧的 3D 模拟中找出 - 和 + 的方向。 |
移动
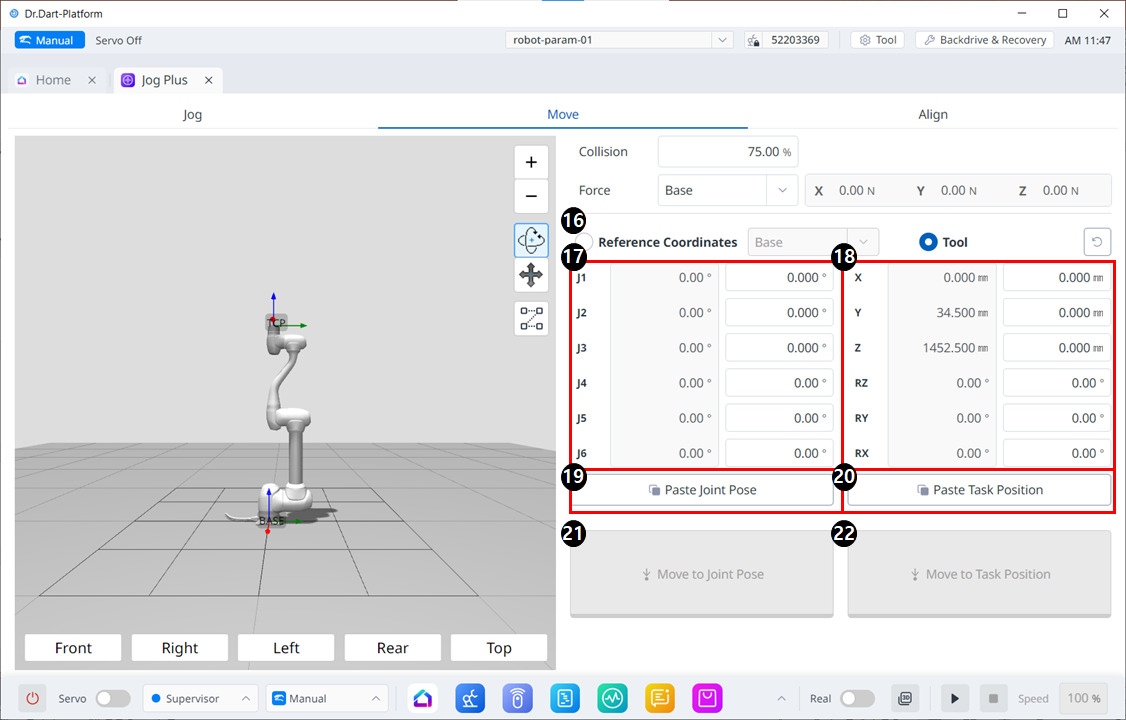
移动菜单布局
|
|
Item |
Description |
|---|---|---|
|
16 |
Reference Coordinates |
选择用于图 18 中的任务坐标的参考坐标系。您可以选择基础坐标、世界坐标或用户坐标。 |
|
17 |
Joint Posture |
显示当前机器人姿态和目标关节姿态。 |
|
18 |
Task Posture |
显示适合所选参考坐标系的当前机器人姿态和目标任务姿态。 |
|
19 |
Paste Joint Posture |
将复制到剪贴板的姿势值粘贴到关节姿势面板中。 |
|
20 |
Paste Task Posture |
将复制到剪贴板的姿势值粘贴到任务姿势面板中。 |
|
21 |
Joint Move button |
该按钮使机器人移动到目标关节姿势。 |
|
22 |
Task Move button |
该按钮使机器人移动到目标任务姿势。 |