Obrigatório FÁCIL 5 min
Os robôs Doosan Robotics oferecem nove movimentos. O movimento do robô é controlado por movimentos padrão, MoveJ e MoveL, e 7 movimentos derivados desses dois movimentos.
Tipos de movimento do robô
|
|
Movimento |
Funcionalidade |
|---|---|---|
|
1 |
MoveJ |
Cada junta do robô move-se do ângulo atual para o ângulo alvo e pára simultaneamente
|
|
2 |
MoveL |
O robô se move para o ponto alvo, mantendo o TCP do robô reto
|
|
3 |
MoveSJ |
O robô move-se em todos os ângulos definidos pelo robô
|
|
4 |
MoveSX |
O TCP do robô se move em todos os pontos
|
|
5 |
MoveJX |
A pose do robô é designada à medida que o TCP do robô se move para o ponto alvo
|
|
6 |
MoveC |
O TCP do robô move-se para o ponto alvo enquanto mantém um arco |
|
7 |
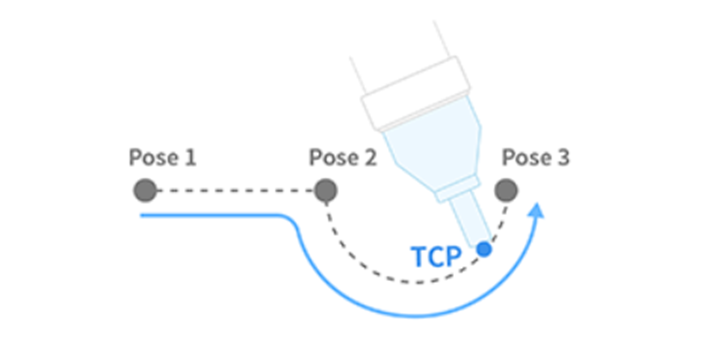
MoveB |
O robô se move para o ponto alvo final através de uma seção que consiste em linhas retas contínuas e arcos |
|
8 |
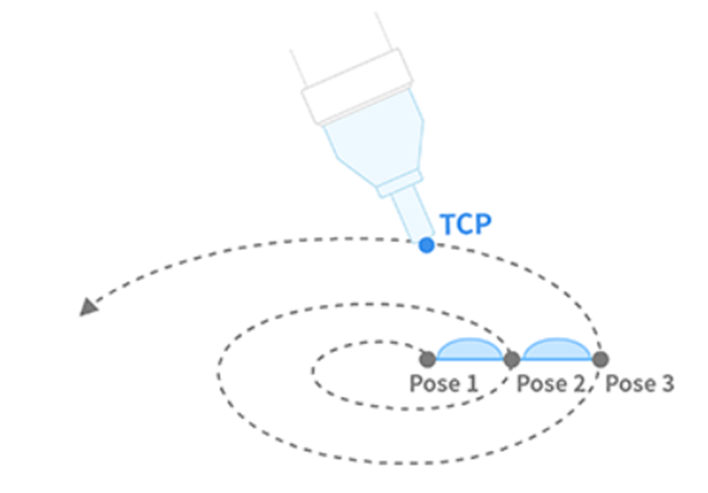
MoveSpiral |
O robô move-se do centro da espiral para o raio máximo |
|
9 |
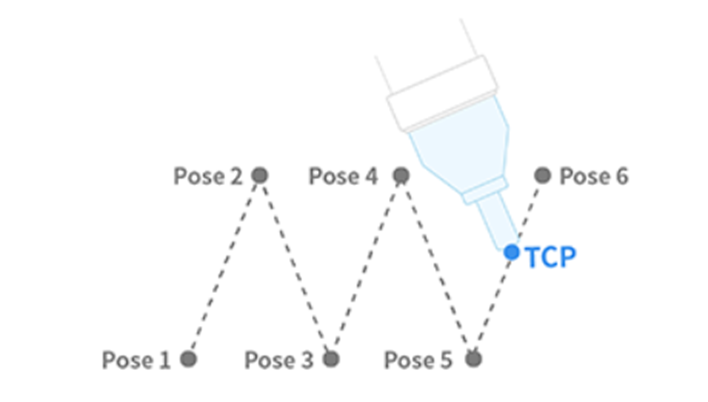
MovePeriódico |
O robô se move em um caminho com uma amplitude e ciclo constantes |
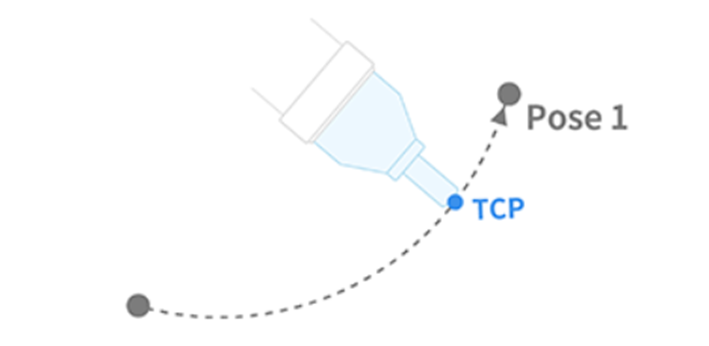
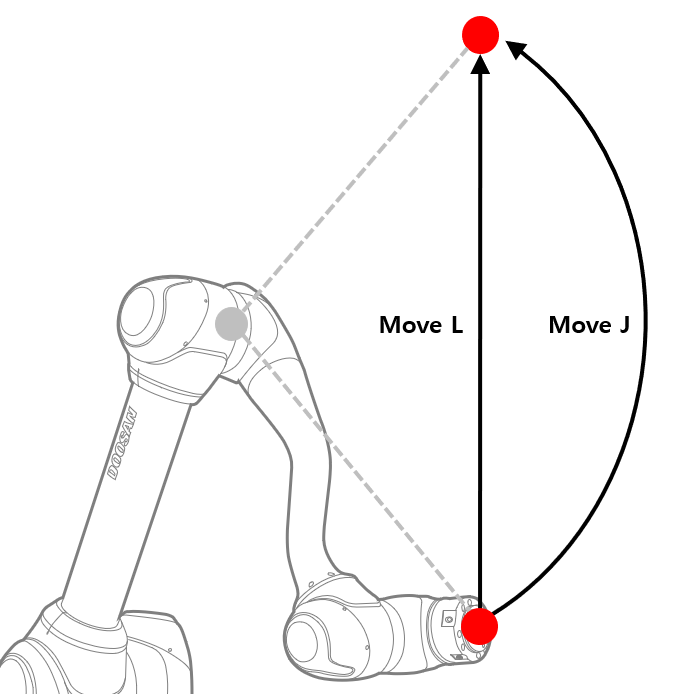
MoveJ&MoveL
Antes de usar o movimento do robô, é fundamental entender os movimentos padrão MoveJ e MoveL.
-
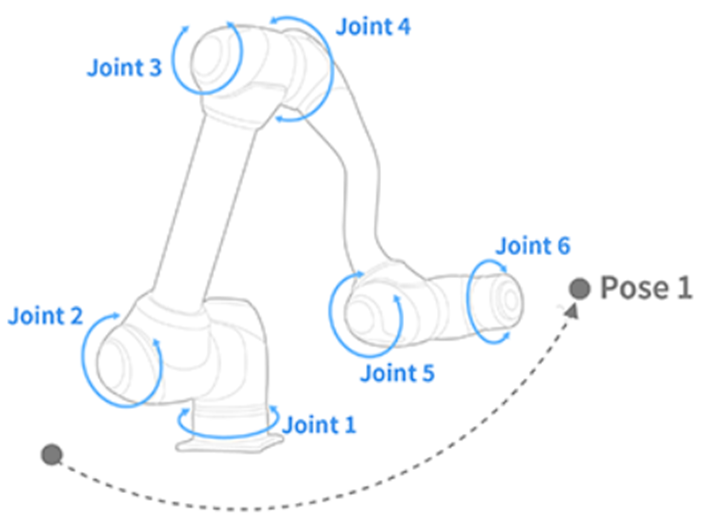
J em MoveJ refere-se às articulações. Neste movimento, cada junta desloca-se para o ângulo alvo e pára simultaneamente.
-
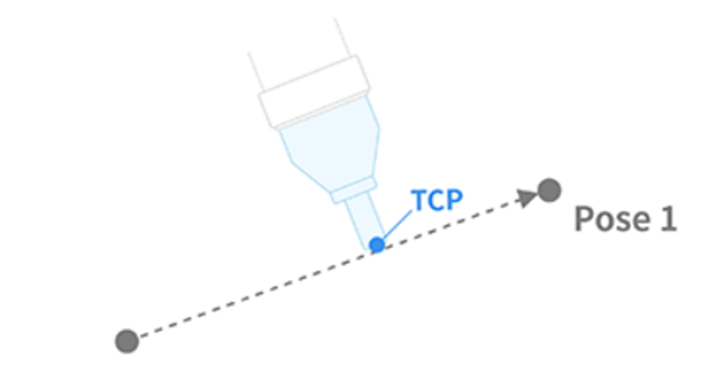
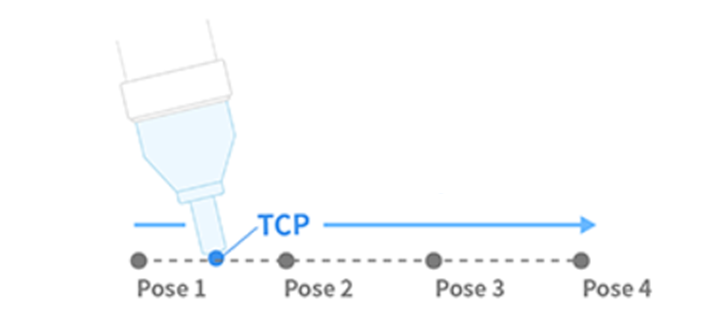
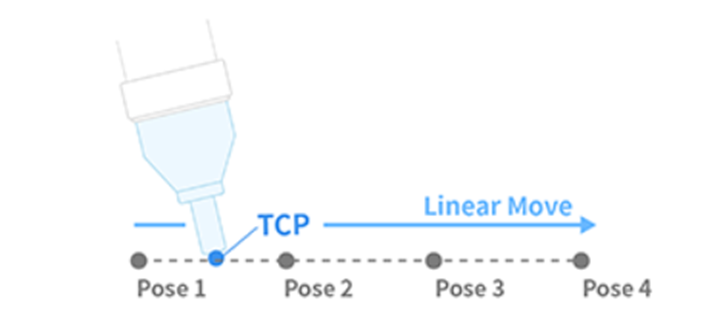
L em MoveL refere-se a linear. Neste movimento, o TCP na extremidade do robô move-se para a posição alvo (posição e ângulo) com movimento linear.
|
|
Tipo |
MoveJ |
MoveL |
|---|---|---|---|
|
1 |
Mover método |
|
|
|
2 |
Vantagem |
|
|
|
3 |
Desvantagem |
|
|
|
4 |
Utilização |
|
|