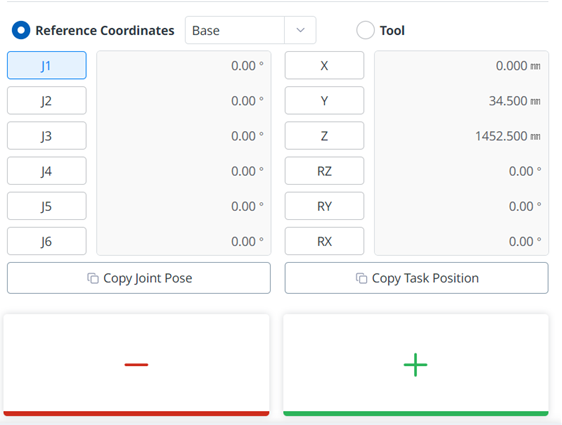
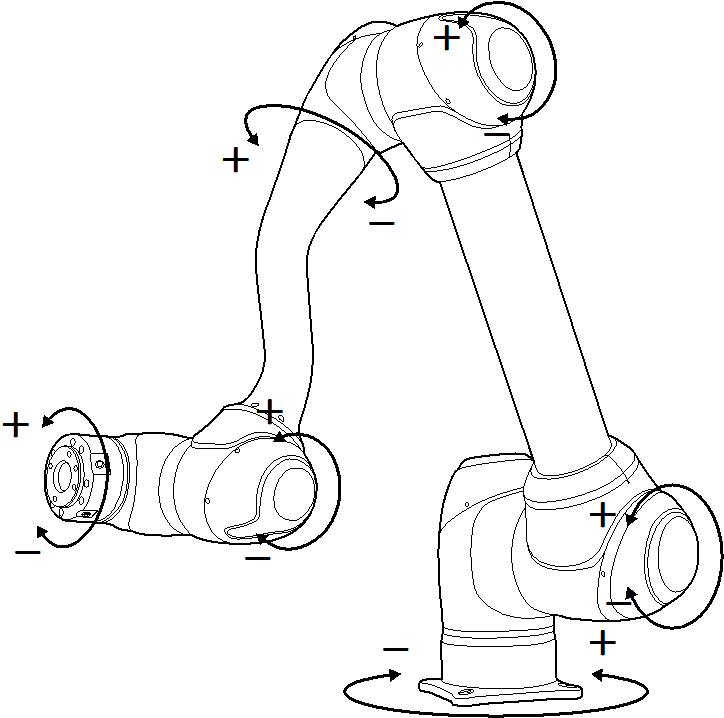
로봇의 조인트 기준으로 실행하기 로봇의 조인트를 기준으로 각도를 조절하려면: 조인트 패널에서 각도를 조절할 축(J1~J6)을 선택하십시오. 방향 버튼( , )을 길게 눌러 해당 축의 각도를 조절하십시오.