Modo de recuperação de software
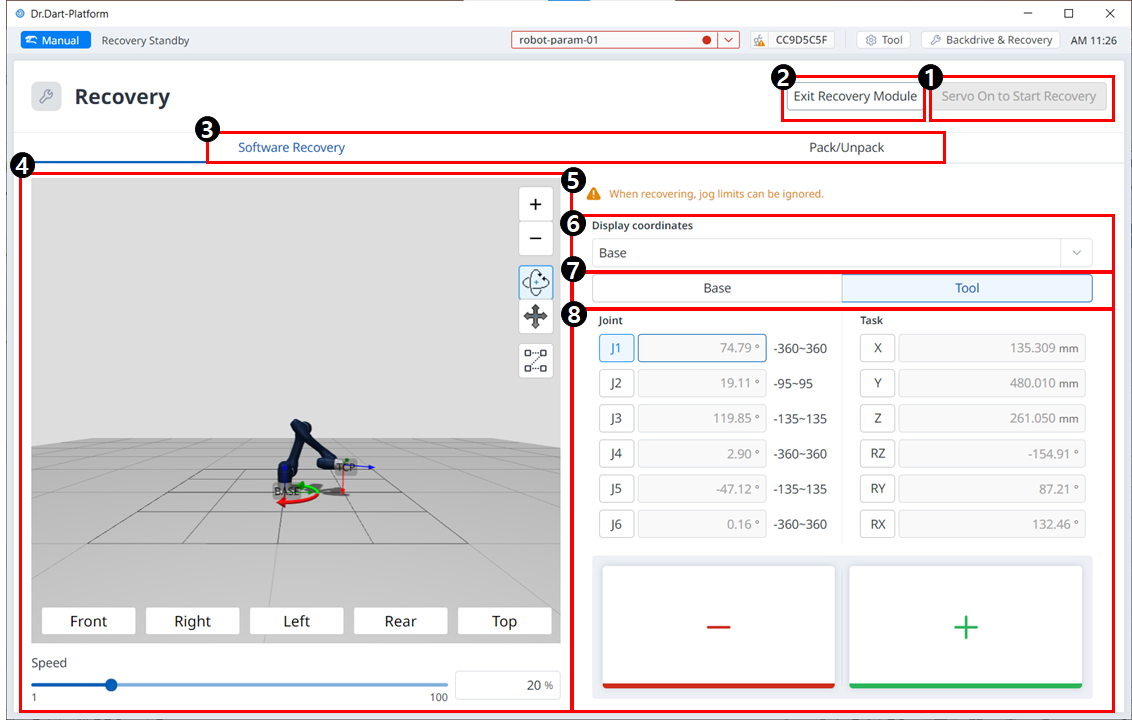
Itens de menu
|
|
Item |
Descrição |
|---|---|---|
|
1 |
Servo ligado para iniciar a recuperação |
Este é um botão para ativar o servo antes de entrar no modo de recuperação. |
|
2 |
Sair da recuperação |
Este botão permite-lhe sair do módulo de recuperação. |
|
3 |
Colhedor |
Esta seção permite que você selecione o modo de Recuperação de Software ou o modo pack/unpack. |
|
4 |
Simulação 3D |
Esta área permite visualizar uma simulação 3D dos valores definidos. |
|
5 |
Mensagem de aviso |
Isto explica as precauções. |
|
6 |
Apresentar Coordenadas |
É aqui que você pode definir a coordenada com base em Base ou Mundo. |
|
7 |
Botão Base/Ferramenta |
É aqui que você pode definir o valor com base na Base ou na Ferramenta. |
|
8 |
Conjunto/Tarefa |
Esta secção permite-lhe introduzir os valores pretendidos para que o robot se mova. |
Para utilizar o modo de recuperação de software, siga estes passos:
-
Toque no menu Recuperação na janela Menu Principal. A tela Software Recovery (Recuperação de software) é exibida automaticamente na janela Recovery (Recuperação).
-
Toque em cada botão conjunto no lado direito da tela Recuperação de software e use
-
Para obter as definições dos botões do cockpit, consultar Cockpit
-
As alterações feitas na configuração são refletidas na janela de simulação à esquerda em tempo real.
-
-
Quando a configuração estiver concluída, toque no botão X na parte superior esquerda para fechar a janela.
O modo de reparação de software não está disponível quando o limite do ângulo da junta é excedido em 3 graus.