월드좌표계(World Coordinates)에서 로봇의 월드좌표계를 설정할 수 있습니다. 로봇의 좌표계를 기본 좌표계인 베이스 좌표계로 사용하는 경우에는 이 과정을 건너뛸 수 있습니다.
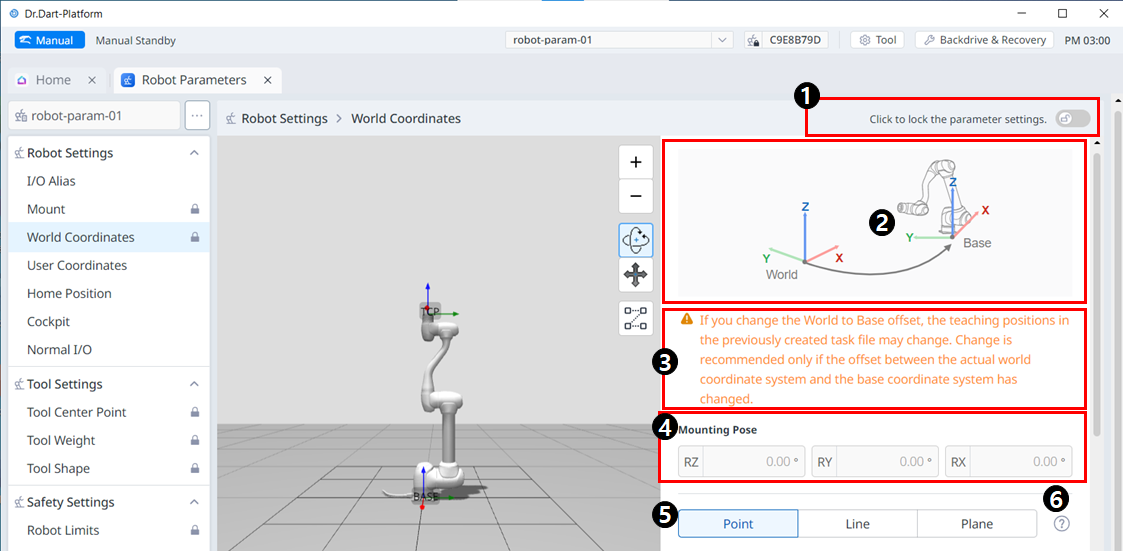
월드좌표계는 Robot Parameters > Robot Settings > World Coordinates 를 선택하여 설정할 수 있습니다.
-
월드좌표계는 로봇의 베이스 설치 위치가 물리적으로 이동/회전한 경우에 사용합니다.
-
월드좌표계를 변경하면 로봇 시뮬레이터 화면도 동일한 이동/회전이 반영됩니다.
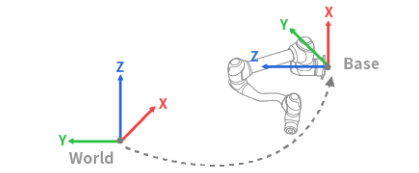
월드좌표계는 로봇 티칭을 완료한 이후에 베이스 위치 및 각도가 변경된 경우에도 활용할 수 있습니다. 기존에 로봇 티칭을 통해 생성한 태스크의 모션들의 좌표계를 모두 BASE에서 WORLD로 변경하면, 모든 모션의 좌표에 대해 월드좌표계의 이동/회전한 만큼 오프셋(offset)이 적용됩니다.
메뉴 구성
|
|
항목 |
설명 |
|---|---|---|
|
1 |
Lock Toggle Button |
설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력을 해야 합니다. |
|
2 |
Information Image |
설정에 필요한 이미지 팁입니다. |
|
3 |
Information Message |
설정에 필요한 팁 메시지입니다. |
|
4 |
Mounting Pose |
A, B, C 각각에 대한 Mounting Pose 값입니다. |
|
5 |
점,선,면 설정 |
점, 선, 면 중 원하는 항목을 선택하여 설정할 수 있습니다. |
|
6 |
Teaching Guide |
점, 선, 면 설정을 위한 가이드입니다. |
|
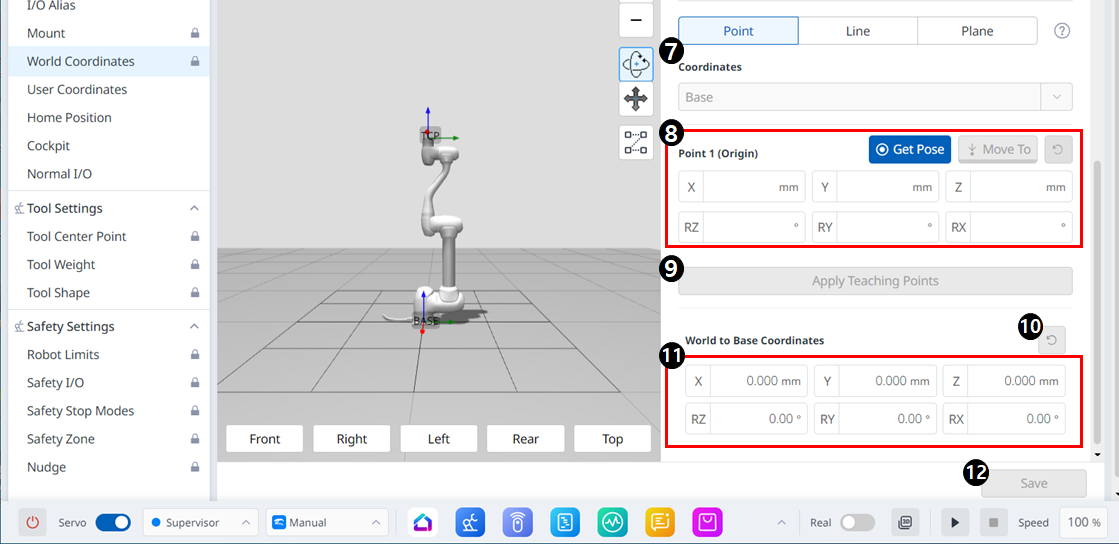
7 |
Coordinates |
Base, World 중 원하는 좌표계를 선택할 수 있습니다. |
|
8 |
Point 1 setting |
6개 축에 대한 각각의 설정 및 Get Pose, Move To 설정이 가능합니다. |
|
9 |
Apply Teaching Points button |
원하는 설정값을 입력하고 이를 적용할 수 있습니다. |
|
10 |
World to Base Coordinates Reset |
이미 입력된 World to Base Coordinates를 리셋할 수 있습니다. |
|
11 |
World to Base Coordinates setting |
6개 축에 대한 설정 값을 입력할 수 있습니다. |
|
12 |
Apply button |
설정 값을 적용할 수 있습니다. |