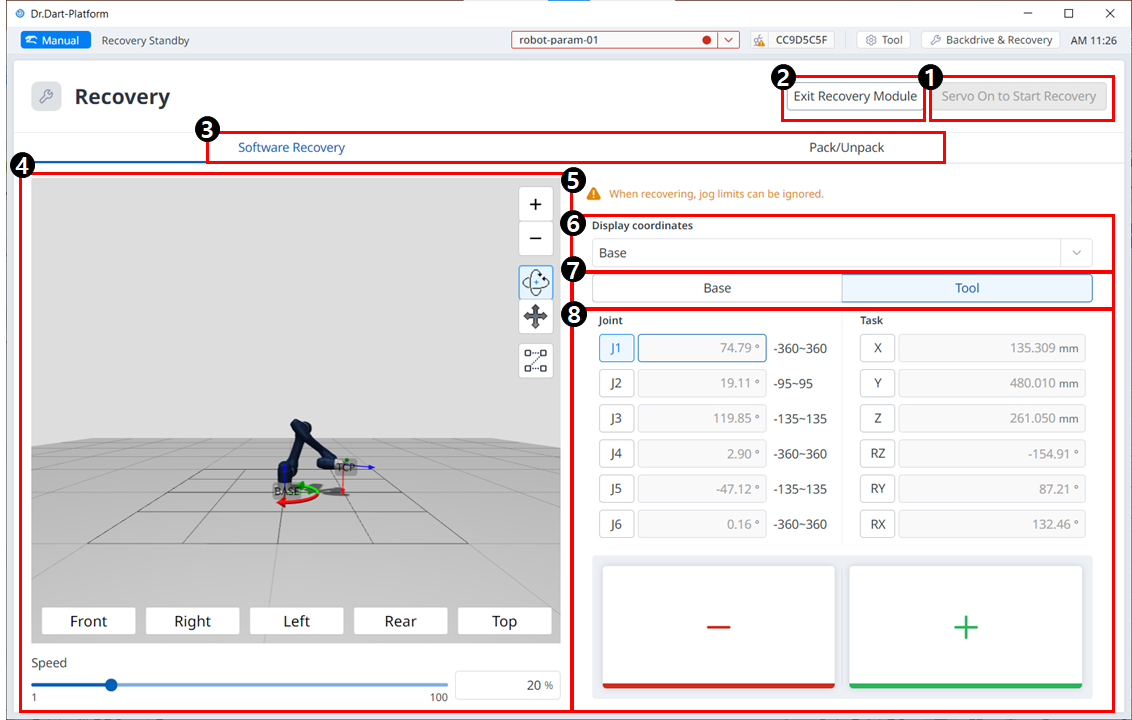
소프트웨어 복구 모드
메뉴 항목
|
|
항목 |
설명 |
|---|---|---|
|
1 |
Servo On to Start Recovery |
Recovery 모드를 시작하기 전에 서보를 활성화하는 버튼입니다. |
|
2 |
Exit Recovery |
Recovery 모듈에서 나갈 수 있는 버튼입니다. |
|
3 |
Header |
소프트웨어 복구 모드 혹은 팩/언팩 모드 중 하나를 선택할 수 있습니다. |
|
4 |
3D Simulation |
설정한 값을 3D로 미리 시뮬레이션 해 볼 수 있습니다. |
|
5 |
Warning Message |
주의 사항을 설명합니다. |
|
6 |
Display Coordinates |
Base 혹은 World 기준으로 좌표계를 설정할 수 있습니다. |
|
7 |
Base/Tool Button |
Base 혹은 Tool 기준으로 값을 설정할 수 있습니다. |
|
8 |
Joint/Task |
원하는 값을 입력하여 로봇을 움직일 수 있습니다. |
소프트웨어 복구 모드를 사용하려면:
-
주 메뉴 창에서 Recovery 메뉴를 탭 하십시오. Recovery 창에서 소프트웨어 복구 화면이 자동으로 활성화됩니다.
-
소프트웨어 복구 화면 오른쪽 조인트 설정 창에서 각 조인트 버튼을 탭 한 후
-
콧핏의 버튼 정의는 Cockpit을 참조하세요.
-
설정 값을 변경하면 왼쪽 시뮬레이션 창에 실시간으로 반영됩니다.
-
-
설정이 완료되면 왼쪽 상단의 X버튼을 탭 해 창을 닫으십시오.
소프트웨어 복구 모드는 조인트 각도 제한이 3도를 초과한 상태에서 사용할 수 없습니다.