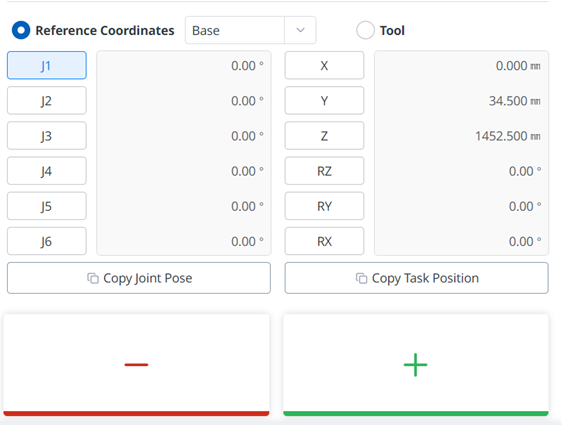
Para ajustar el ángulo en función de la junta del robot, siga estos pasos:
-
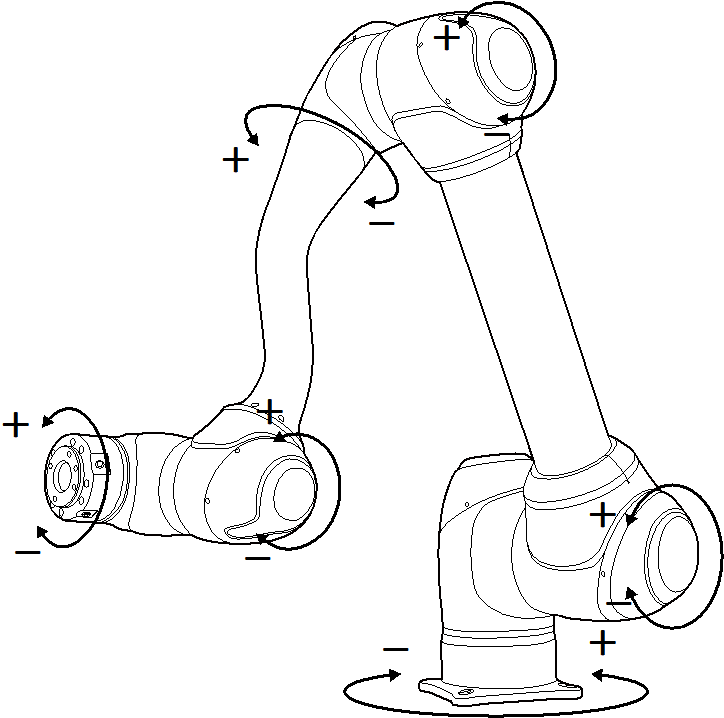
Seleccione el eje (J1-J6) para ajustar el ángulo en el panel de unión.
-
Mantenga pulsados los botones de dirección (