
Para mover el robot en función de la herramienta del robot, siga estos pasos:
-
Seleccione la herramienta como sistema de coordenadas de referencia.
-
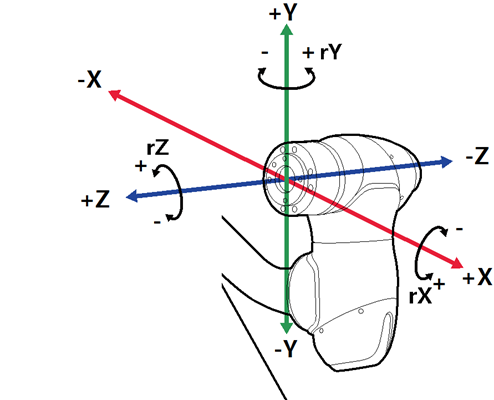
En el panel de tareas, seleccione el eje (X~RX) para el cual desea ajustar el ángulo.
-
Mantenga presionado un botón de dirección (+,_) para mover el eje correspondiente.
-
El área de seguridad no se aplica en modo virtual.
-
Rx, Ry y Rz se ejecutan de acuerdo con TCP (posición central de la herramienta).