Alinear menú
|
|
Item |
Description |
|---|---|---|
|
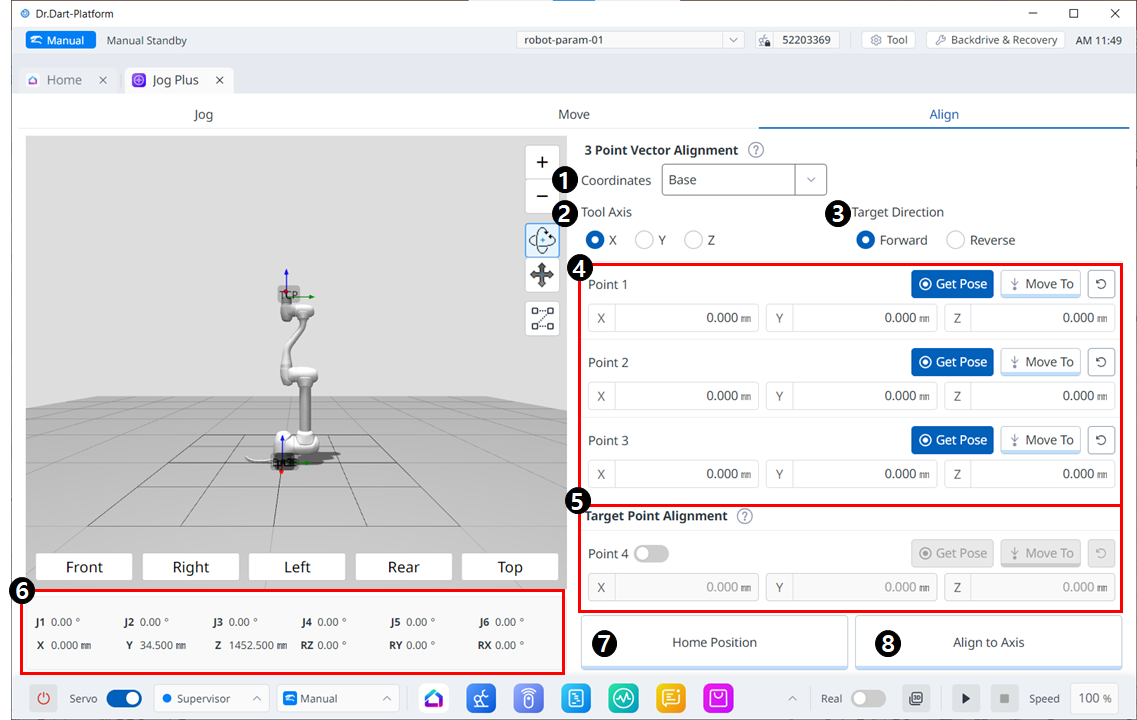
1 |
Coordinates |
Seleccione el sistema de coordenadas de referencia para las posiciones en las Figuras 4 y 5. |
|
2 |
Tool Axis |
Seleccione qué eje de TCP alinear. |
|
3 |
Target direction |
Seleccionar dirección de avance/retroceso |
|
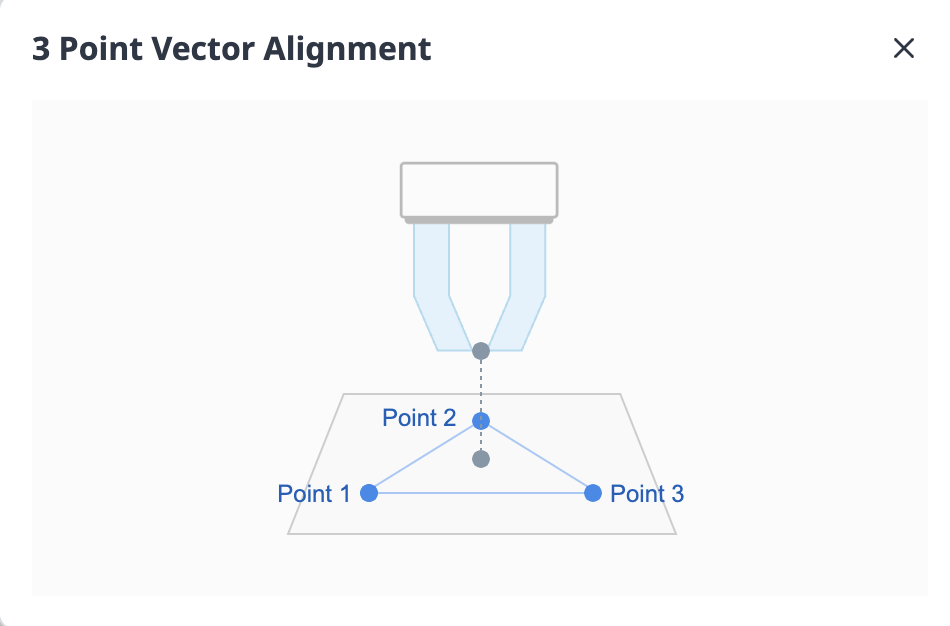
4 |
Pick points on a plane |
Elija tres puntos para definir el plano. Las definiciones son las siguientes: |
|
5 |
Target Point Alignment |
Seleccione un punto para colocar TCP. Esto es opcional y, si no está marcado, solo se ordenará la orientación desde la ubicación actual. |
|
6 |
Robot Posture |
Muestra la postura de las articulaciones y la postura de la tarea del robot actual. Para la postura de la tarea, sigue el sistema de coordenadas de referencia seleccionado en la Figura 1. |
|
7 |
Home Position |
Cuando hace clic en el botón, se mueve a la posición de inicio. |
|
8 |
Align to Axis |
Cuando haces clic en el botón, comienza. |