在"机械手极限值"中,可以设置与机械手相关的各种极限值。这些限制用于确保机械手在设定的限制范围内安全操作。
可以在 机械手参数>安全设置>机械手限值中设置机械手限值。
-
有关每个限值 的详细说明,请参见 机械手极限值 。
机械手极限值主要分为3类。每个类别包括以下屏幕和功能。
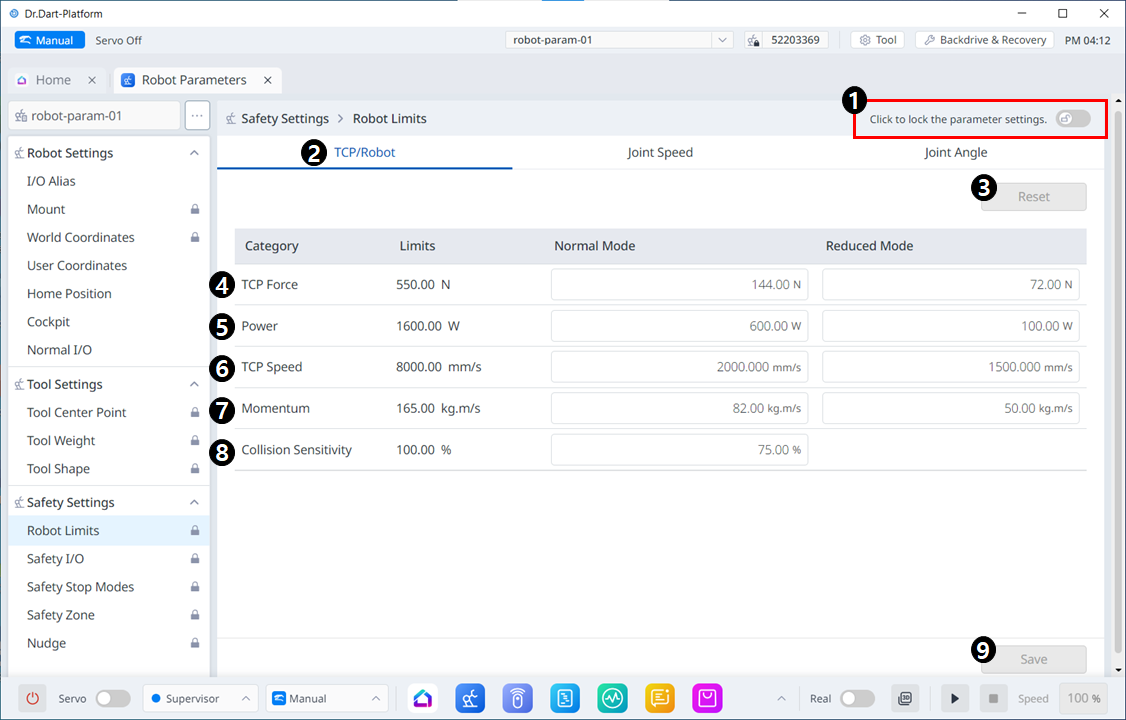
菜单项
|
|
项目 |
说明 |
|---|---|---|
|
1. |
锁定切换按钮 |
用于锁定设置值。修改设置值时需要提供安全密码。 |
|
2. |
TCP/Robot |
机械手限值的大分类。 |
|
3. |
重置 |
用于重置设置。 |
|
4. |
力 |
用于设置力。 |
|
5. |
电源 |
用于设置电源。 |
|
6. |
速度 |
用于设置速度。 |
|
7. |
动量 |
用于设定动力。 |
|
8. |
碰撞 |
用于设置碰撞。 |
|
9. |
保存 |
用于保存适用的设置。 |
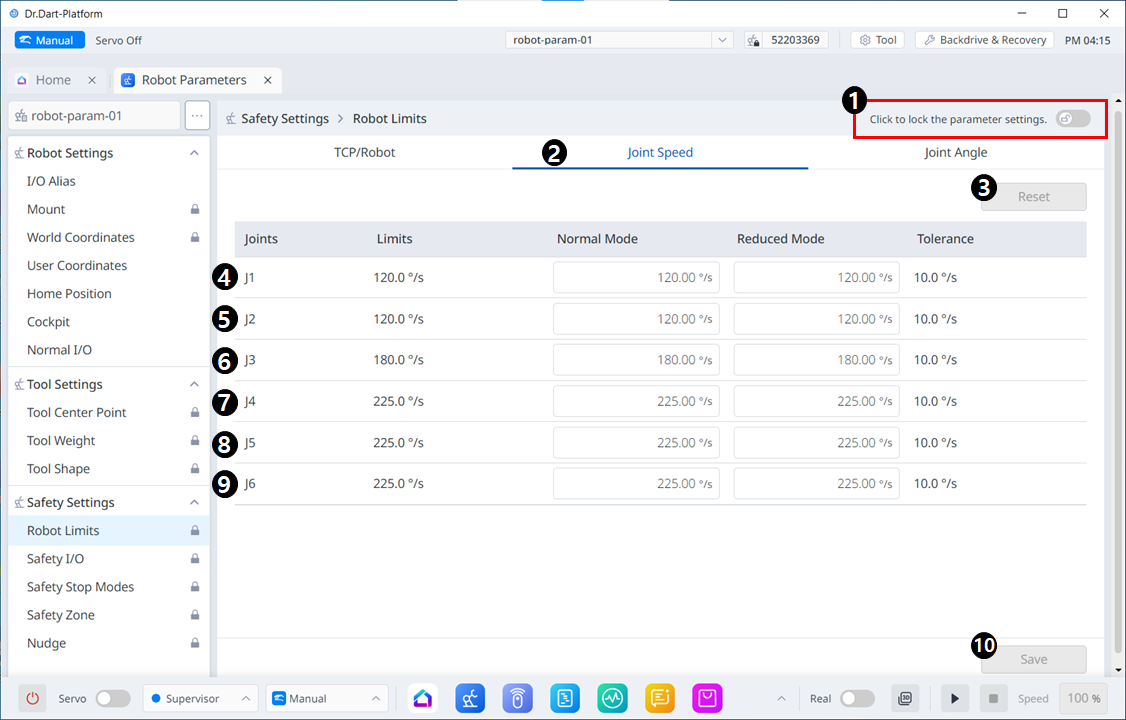
菜单项
|
|
项目 |
说明 |
|---|---|---|
|
1. |
锁定切换按钮 |
用于锁定设置值。修改设置值时需要提供安全密码。 |
|
2. |
接头速度 |
机械手限值的大分类。 |
|
3. |
重置 |
用于重置设置。 |
|
4. |
J1 |
用于分别设置"正常"和"简化"模式的设置。 |
|
5. |
J2 |
用于分别设置"正常"和"简化"模式的设置。 |
|
6. |
J3 |
用于分别设置"正常"和"简化"模式的设置。 |
|
7. |
J4 |
用于分别设置"正常"和"简化"模式的设置。 |
|
8. |
J5 |
用于分别设置"正常"和"简化"模式的设置。 |
|
9. |
J6 |
用于分别设置"正常"和"简化"模式的设置。 |
|
10. |
保存 |
用于保存适用的设置。 |
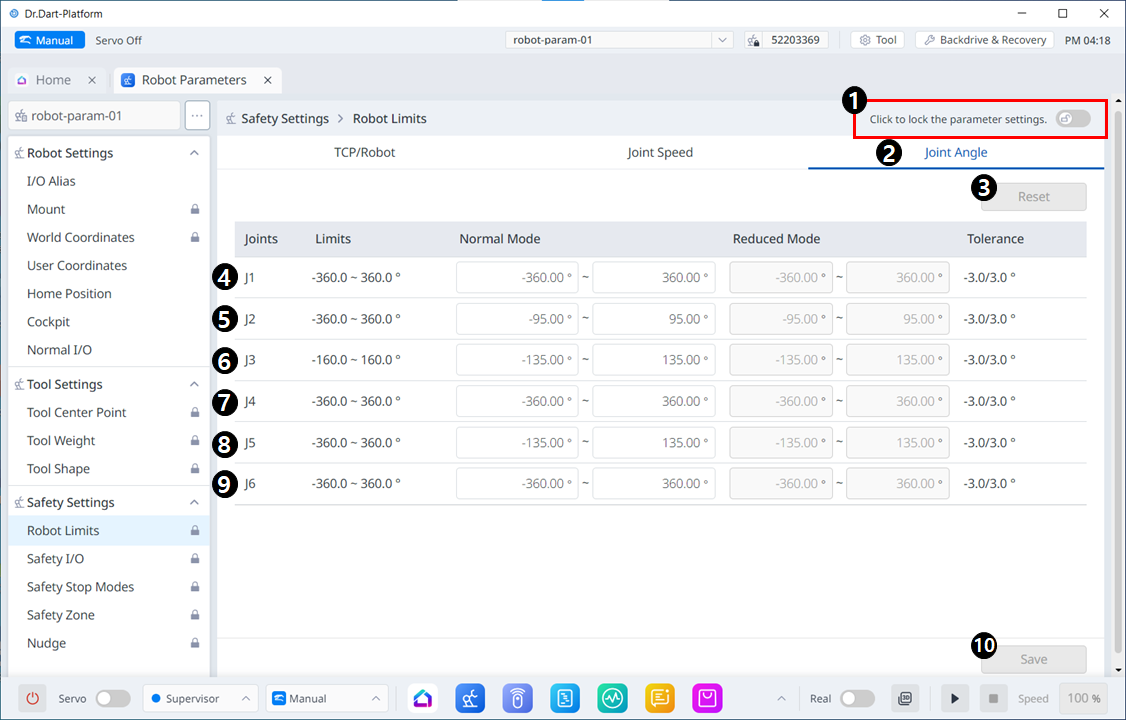
菜单项
|
|
项目 |
说明 |
|---|---|---|
|
1. |
锁定切换按钮 |
用于锁定设置值。修改设置值时需要提供安全密码。 |
|
2. |
接头角度 |
机械手限值的大分类。 |
|
3. |
重置 |
用于重置设置。 |
|
4. |
J1 |
用于分别设置"正常"和"简化"模式的设置。 |
|
5. |
J2 |
用于分别设置"正常"和"简化"模式的设置。 |
|
6. |
J3 |
用于分别设置"正常"和"简化"模式的设置。 |
|
7. |
J4 |
用于分别设置"正常"和"简化"模式的设置。 |
|
8. |
J5 |
用于分别设置"正常"和"简化"模式的设置。 |
|
9. |
J6 |
用于分别设置"正常"和"简化"模式的设置。 |
|
10. |
保存 |
用于保存适用的设置。 |