Mendatory EASY 5 min
안전 정지의 종류에 대해 배우고 안전 정지 및 해제 방법에 대해 배웁니다.
안전 정지 종류
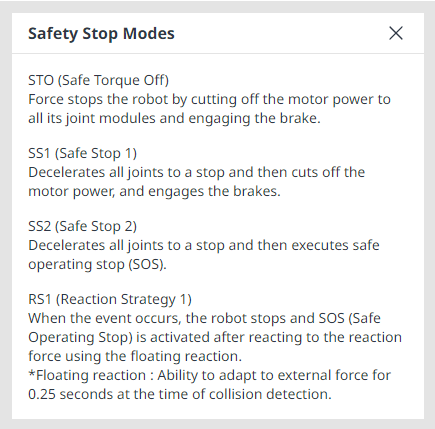
사용자의 안전을 위해 제공되는 정지 모드는 다음과 같습니다.
-
STO (Safe Torque Off): 서보 오프 정지 (모터 전원을 즉시 Off)
-
SS1(Safe Stop 1): 최대감속정지 후 서보오프
-
SS2(Safe Stop 2): 최대감속정지 후 대기 (일시정지)
-
RS1: 충돌 후 외력 반대 방향으로 순응한 후 대기(Collision Detection / TCP force Limit Violation에서만 설정 가능)
두산 로봇은 두 가지 안전 정지 기능을 갖고 있습니다. 비상 정지는 일반적인 비상 상황에 정지하는 용도로 사용되고 해제한 후 서보 온하여 로봇을 재 구동 시킬 수 있습니다. 보호 정지의 경우 보호 정지의 원인이 되는 위반 사항을 해결한 이후에 정지를 해제하고 로봇을 재 구동할 수 있습니다.
-
비상 정지(Emergency Stop): 티치펜던트의 비상 정지 버튼 또는 추가적으로 설치된 외부 장치가 작동하였을 때의 정지 모드를 설정티치펜던트의 비상 정지 스위치 또는 TBSFT의 EM단자에 연결된 비상 정지 스위치가 눌린 경우에 발생합니다.STO 또는 SS1만 선택할 수 있습니다.
-
보호 정지(Protective Stop): 외부에 연결된 보호 장비를 작동하였을 때의 정지 모드를 설정TBSFT의 PR단자에 연결된 보호 장치가 가동된 경우에 발생합니다.
안전 정지 기능에 관한 자세한 내용은 안전기능 을 참조하십시오.
안전 정지/해제 방법
티치펜던트에 부착된 비상 정지 버튼을 누르거나 Safety I/O에 연결한 안전 장치를 통해 로봇을 비상 정지할 수 있습니다. 티치펜던트 화면에서 Worckell Manager > Robot > Safety I/O 기능을 활용하여 안전 장치를 비상 정지 또는 보호 정지로 연결할 수 있습니다.
-
안전 장치를 Safety I/O에 연결하기 위한 방법은 컨트롤러 I/O 연결 을 참고하십시오.
-
프로그램에서 해당 연결에 대한 안전 정지 기능을 설정하는 방법은 안전 신호 입출력(Safety I/O) 를 참고하십시오.
메뉴 항목
|
|
항목 |
설명 |
|---|---|---|
|
1 |
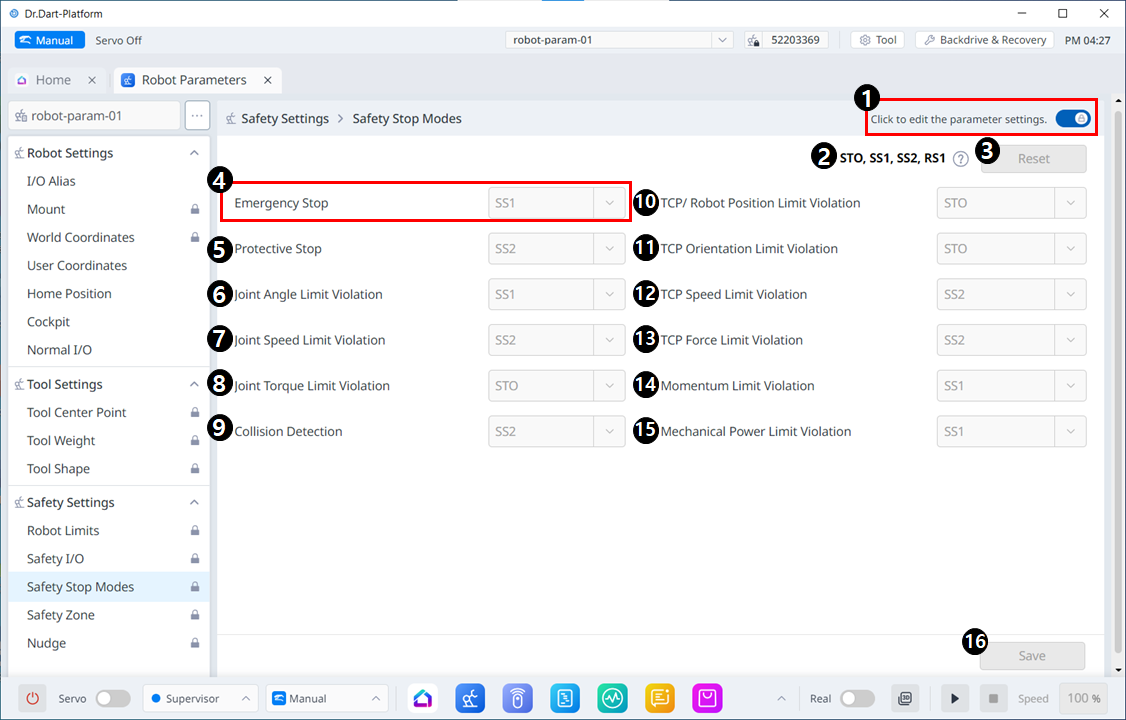
Lock 토글 버튼 |
설정된 값이 잠금 상태 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
|
2 |
Information message |
설정을 위해 필요한 정보가 있는 메시지 입니다. |
|
3 |
Reset |
설정의 초기화를 위한 버튼입니다. |
|
4 |
Emergency Stop |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 |
|
5 |
Protective Stop |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. SS1 SS2 |
|
6 |
Joint Angle Limit Violation |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 |
|
7 |
Joint Speed Limit Violation |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 |
|
8 |
Joint Torque Limit Violation |
STO만 가능합니다. |
|
9 |
Collision Detection |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 RS1 |
|
10 |
TCP Robot Position Limit Violation |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 |
|
11 |
TCP Orientation Limit Violation |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 |
|
12 |
TCP Speed Limit Violation |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 |
|
13 |
TCP Force Limit Violation |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 |
|
14 |
Momentum Limit Violation |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 |
|
15 |
Mechanical Limit Violation |
해당 항목에서 사용할 Safety Stop을 선택할 수 있습니다. 드롭다운 메뉴는 다움과 같습니다. STO SS1 SS2 |
|
16 |
Save |
설정 값들을 저장할 수 있습니다. |
Information 메시지에는 다음과 같은 팝업이 뜹니다.