로봇 제한치(Robot Limits)에서는 로봇에 관련된 여러 제한치를 설정할 수 있습니다. 설정한 제한치 내에서 로봇을 안전하게 구동 시키기 위해 사용합니다.
로봇 제한치는 Robot Parameter> Safety Settings > Robot Limits 를 선택하여 설정할 수 있습니다.
-
각 제한치에 대한 자세한 설명은 로봇 제한치(Robot Limits) 을 참조하십시오.
Robot Limits에는 크게 세 항목으로 나누어 집니다. 각각의 항목은 다음과 같은 화면 및 기능을 포함합니다.
메뉴 항목
|
|
항목 |
설명 |
|---|---|---|
|
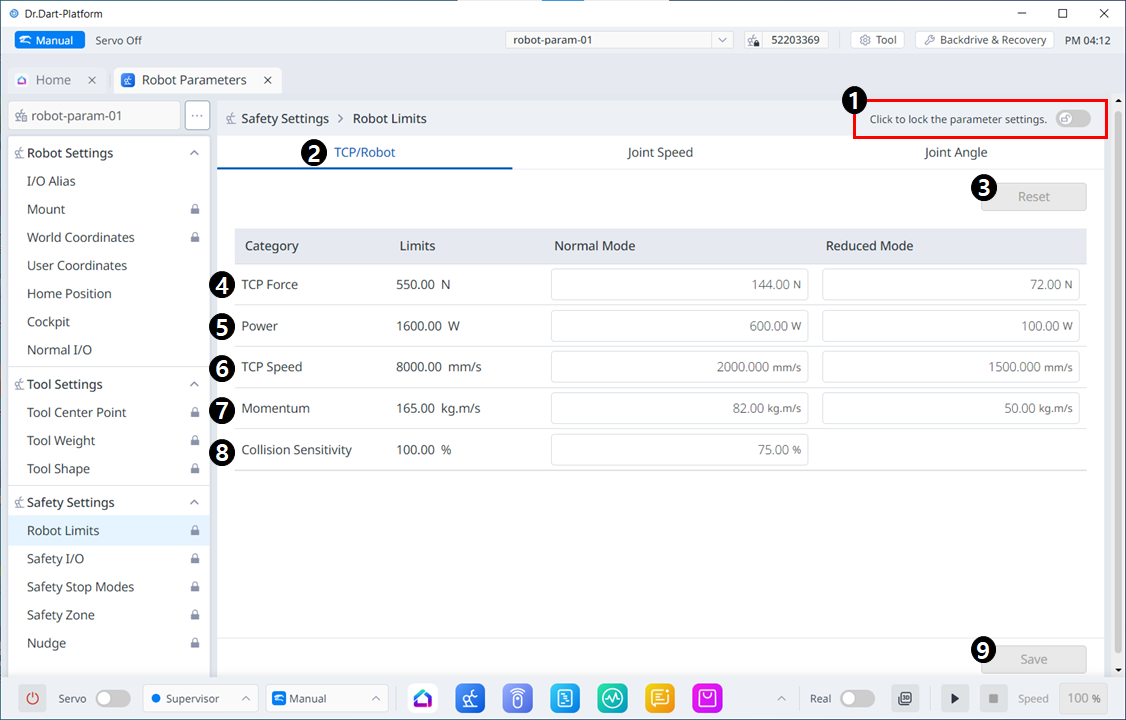
1 |
Lock 토글 버튼 |
설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
|
2 |
TCP/Robot |
Robot limits의 대 분류입니다. |
|
3 |
Reset |
설정을 초기화 할 수 있습니다. |
|
4 |
Force |
Force 설정이 가능합니다. |
|
5 |
Power |
전원의 설정이 가능합니다. |
|
6 |
Speed |
속도 설정이 가능합니다. |
|
7 |
Momentum |
운동량 설정이 가능합니다. |
|
8 |
Collision |
충돌 설정이 가능합니다. |
|
9 |
Save |
해당 설정을 저장할 수 있습니다. |
메뉴 항목
|
|
항목 |
설명 |
|---|---|---|
|
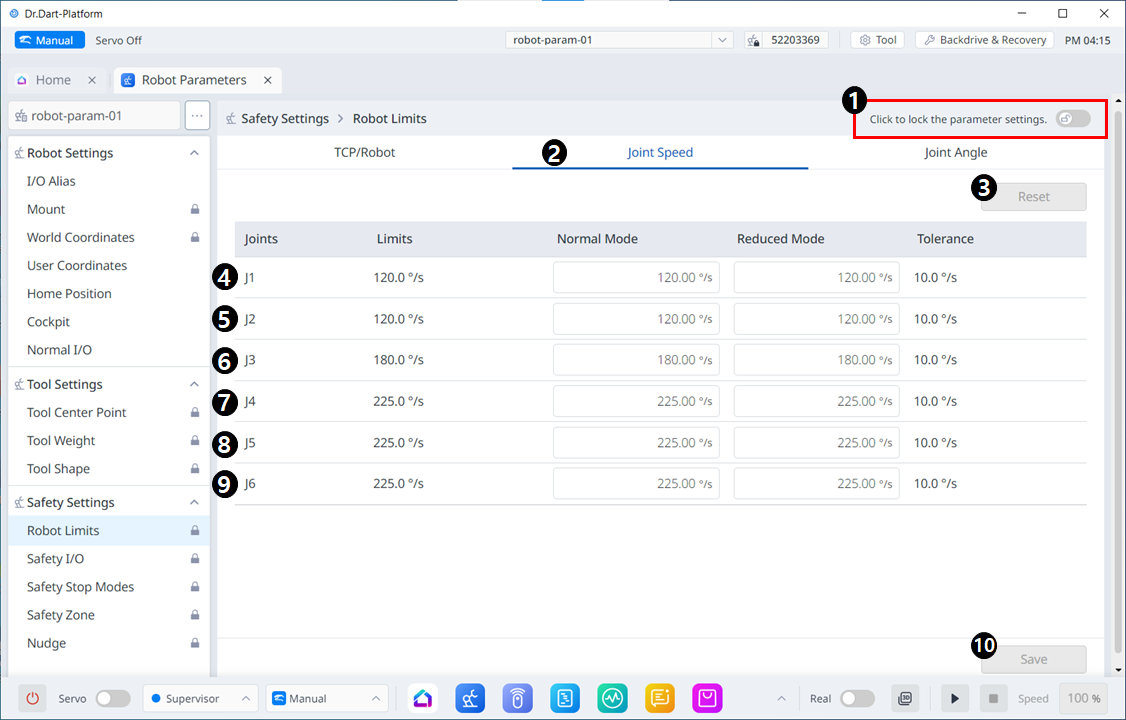
1 |
Lock 토글 버튼 |
설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
|
2 |
Joint Speed |
Robot limits의 대 분류입니다. |
|
3 |
Reset |
설정을 초기화 할 수 있습니다. |
|
4 |
J1 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
5 |
J2 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
6 |
J3 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
7 |
J4 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
8 |
J5 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
9 |
J6 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
10 |
Save |
해당 설정을 저장할 수 있습니다. |
메뉴 항목
|
|
항목 |
설명 |
|---|---|---|
|
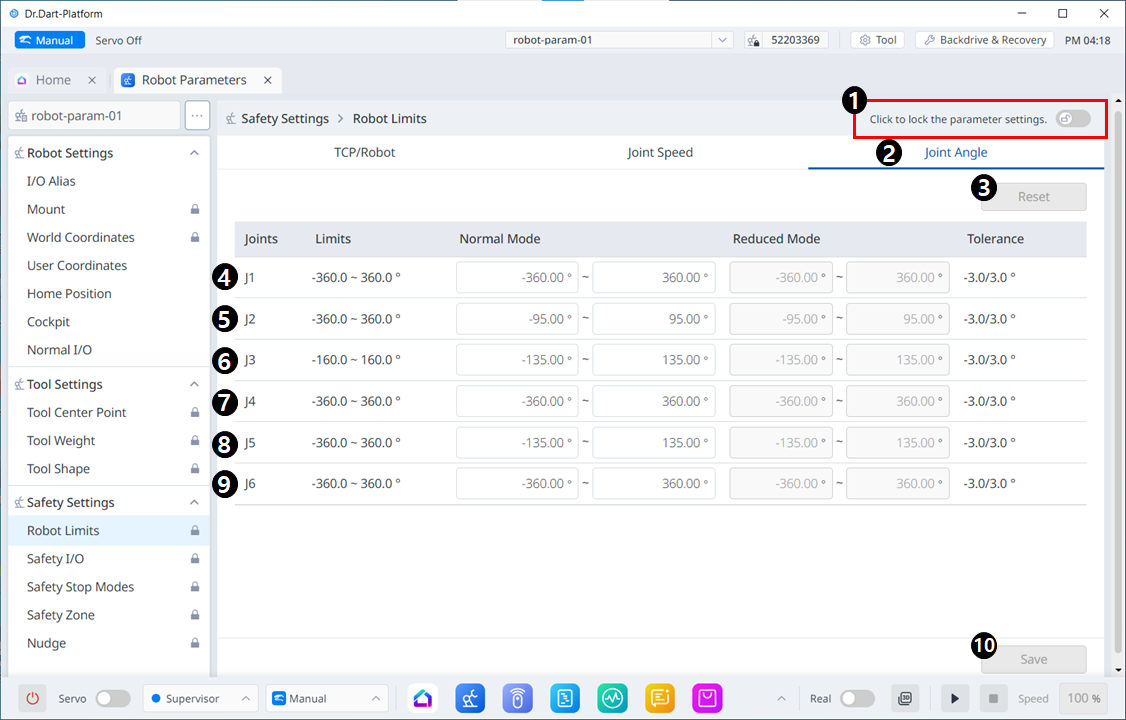
1 |
Lock 토글 버튼 |
설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
|
2 |
Joint Angle |
Robot limits의 대 분류입니다. |
|
3 |
Reset |
설정을 초기화 할 수 있습니다. |
|
4 |
J1 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
5 |
J2 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
6 |
J3 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
7 |
J4 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
8 |
J5 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
9 |
J6 |
Normal 모드, Reduced 모드 각각에 대한 설정이 가능합니다. |
|
10 |
Save |
해당 설정을 저장할 수 있습니다. |