Limiti e sicurezza del robot
Impostazione dei limiti del robot
In robot Limits (limiti robot), è possibile impostare vari limiti relativi al robot. Questi limiti vengono utilizzati per garantire che il robot funzioni in modo sicuro entro i limiti impostati.
I limiti del robot possono essere impostati in robot Parameter (parametro robot) > Safety Settings(Impostazioni di sicurezza) > robot Limits (limiti robot) .
Per una descrizione dettagliata di ciascun limite, fare riferimento a limiti robot.
I limiti del robot sono in gran parte suddivisi in 3 categorie. Ogni categoria include le seguenti schermate e funzioni.
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Pulsante di attivazione/disattivazione blocco | Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
| 2 | TCP/robot | Ampia classificazione dei limiti del robot. |
| 3 | Ripristina | Utilizzato per ripristinare le impostazioni. |
| 4 | Forza | Usato per impostare la forza. |
| 5 | Potenza | Utilizzato per impostare l'alimentazione. |
| 6 | Velocità | Utilizzato per impostare la velocità. |
| 7 | Slancio | Utilizzato per impostare lo slancio. |
| 8 | Collisione | Utilizzato per impostare la collisione. |
| 9 | Salva | Consente di salvare l'impostazione desiderata. |
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Pulsante di attivazione/disattivazione blocco | Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
| 2 | Velocità giunto | Ampia classificazione dei limiti del robot. |
| 3 | Ripristina | Utilizzato per ripristinare le impostazioni. |
| 4 | J1 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 5 | J2 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 6 | J3 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 7 | J4 (inattivo per i modelli serie P) | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 8 | J5 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 9 | J6 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 10 | Salva | Consente di salvare l'impostazione desiderata. |
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Pulsante di attivazione/disattivazione blocco | Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
| 2 | Angolo giunto | Ampia classificazione dei limiti del robot. |
| 3 | Ripristina | Utilizzato per ripristinare le impostazioni. |
| 4 | J1 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 5 | J2 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 6 | J3 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 7 | J4 (inattivo per i modelli serie P) | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 8 | J5 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 9 | J6 | Consente di impostare le impostazioni rispettivamente per le modalità normale e ridotta. |
| 10 | Salva | Consente di salvare l'impostazione desiderata. |
I/o di sicurezza
Questa funzione viene utilizzata per l'ingresso/uscita di segnali relativi alla sicurezza ai terminali ridondanti. Se viene rilevato che uno dei segnali di input/output di sicurezza presenta un segnale ridondante diverso, determina un circuito aperto o un guasto hardware e arresta il robot in modalità di arresto sto.
Per impostare i/o di sicurezza, selezionare parametri robot > Impostazioni di sicurezza > i/o di sicurezza.
Per ulteriori informazioni, fare riferimento a i/o segnale di sicurezza .
Ingresso
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Pulsante di attivazione/disattivazione blocco | Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
| 2 | Ingresso/uscita | È possibile selezionare input/Output per l'impostazione. |
| 3 | Impostazione del segnale | Opzioni impostate per ciascuna porta. Non utilizzato |
| 4 | Selezionare se ignorare il segnale a seconda dello stato del robot | Se si seleziona il segnale "arresto protettivo", è possibile impostare se ignorare il segnale selezionato negli stati del robot "MANUALE, RECUPERO, HGC". |
| 5 | Impostare la velocità di decelerazione | È possibile impostare la velocità di decelerazione. Può essere da 0 a 100. |
| 6 | Salva | Questo pulsante consente di salvare l'impostazione immessa. |
Uscita
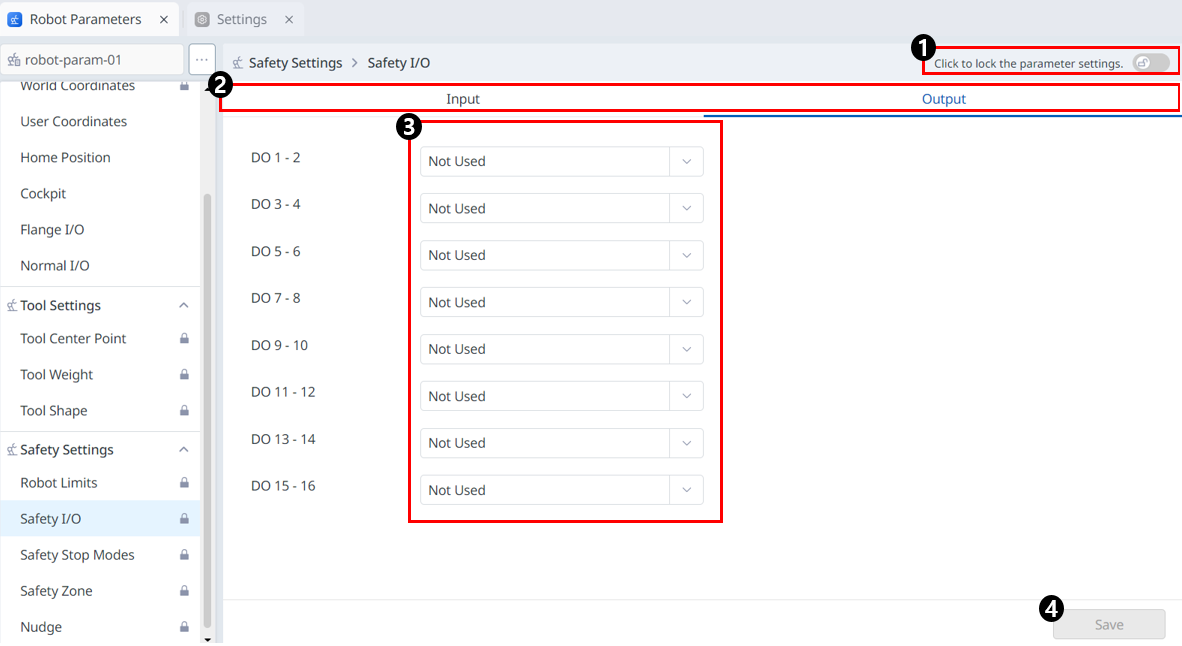
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Pulsante di attivazione/disattivazione blocco | Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
| 2 | Ingresso/uscita | È possibile selezionare input/Output per l'impostazione. |
| 3 | Impostazione del segnale | Opzioni impostate per ciascuna porta. Non utilizzato |
| 4 | Salva | Questo pulsante consente di salvare l'impostazione immessa. |
Impostazioni modalità arresto di sicurezza
Apprendere i tipi di arresti di sicurezza e come inserire/disinserire l'arresto di sicurezza.
Tipi di arresti di sicurezza
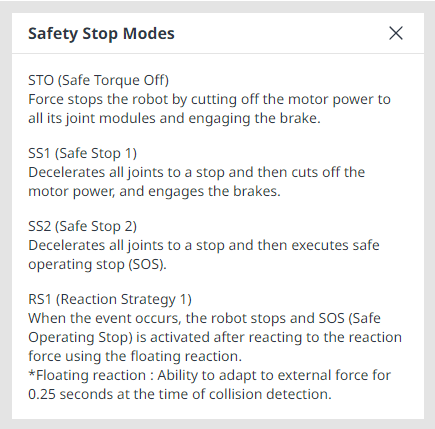
Le modalità di arresto fornite per garantire la sicurezza dell'utente sono le seguenti:
Sto (Safe Torque Off): Arresta il servomeccanismo (l'alimentazione del motore viene immediatamente disattivata)
SS1 (Safe Stop 1): Servomeccanismo disattivato dopo l'arresto di decelerazione massima
SS2 (Safe Stop 2): Standby dopo l'arresto di decelerazione massima (pausa)
RS1: In caso di collisione, si attiene alla direzione opposta alla collisione e quindi entra in standby (può essere impostato solo in rilevamento collisione/violazione limite forza TCP)
I robot Doosan Robotics sono dotati di due tipi di funzioni di arresto di sicurezza. L'arresto di emergenza viene utilizzato per situazioni di emergenza generali e il robot può riprendere il funzionamento con il servo attivo dopo aver rilasciato l'arresto di emergenza. In caso di arresto protettivo, il robot può riprendere il funzionamento risolvendo la causa dell'arresto protettivo e rilasciando l'arresto.
Arresto di emergenza: Consente di impostare la modalità di arresto quando viene attivato il pulsante di arresto di emergenza del teach pendant o un dispositivo esterno aggiuntivo installato
Si attiva quando viene premuto l'interruttore di arresto di emergenza del teach pendant o quello collegato al terminale TBSFT EM.
È possibile selezionare solo sto o SS1.
Arresto protettivo: Imposta la modalità di arresto quando viene attivata l'attrezzatura di protezione collegata esternamente
Si attiva quando viene attivato il dispositivo di protezione collegato al terminale TBSFT PR.
Per ulteriori informazioni sulle funzioni di arresto di sicurezza, vedere funzioni di sicurezza.
Inserimento/disinserimento dell'arresto di sicurezza
Premere il pulsante di arresto di emergenza sul teach pendant o attivare il dispositivo di sicurezza collegato all'i/o di sicurezza per attivare l'arresto di emergenza. I dispositivi di sicurezza possono essere collegati all'arresto di emergenza o all'arresto protettivo tramite i parametri del robot > Impostazioni di sicurezza > funzioni i/o di sicurezza della schermata teach pendant.
Per ulteriori informazioni sul collegamento di un dispositivo di sicurezza a i/o di sicurezza, fare riferimento a collegamento i/o del controller.
Per informazioni su come impostare la funzione di arresto di sicurezza per questo collegamento nel programma, fare riferimento a i/o segnale di sicurezza.
Menu
Elementi | Descrizione | |
|---|---|---|
| 1 | Pulsante di attivazione/disattivazione blocco | Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
| 2 | Messaggio informativo | Un messaggio che fornisce le informazioni necessarie per l'impostazione. |
| 3 | Ripristina | Un pulsante per ripristinare le impostazioni. |
| 4 | Arresto di emergenza | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: STO SS1 |
| 5 | Arresto protettivo | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: SS1 SS2 |
| 6 | Violazione del limite dell'angolo del giunto | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: STO SS1 SS2 |
| 7 | Violazione del limite di velocità del giunto | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: Sto (eccetto serie H/P) SS1 SS2 |
| 8 | Violazione del limite di coppia del giunto | È disponibile solo sto. |
| 9 | Rilevamento collisioni | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: Sto (eccetto serie H/P) SS1 SS2 RS1 |
| 10 | Violazione del limite di posizione del robot TCP | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: STO SS1 SS2 |
| 11 | Violazione del limite di orientamento TCP | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: Sto (eccetto serie H/P) SS1 SS2 |
| 12 | Violazione del limite di velocità TCP | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. Il menu a discesa include quanto segue: Sto (eccetto serie H/P) SS1 SS2 |
| 13 | Violazione limite forza TCP | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: Sto (eccetto serie H/P) SS1 SS2 |
| 14 | Violazione del limite di slancio | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: Sto (eccetto serie H/P) SS1 SS2 |
| 15 | Violazione dei limiti meccanici | È possibile selezionare un arresto di sicurezza da utilizzare per la voce corrispondente. I menu a discesa includono: Sto (eccetto serie H/P) SS1 SS2 |
| 16 | Salva | Questo pulsante consente di salvare i valori di impostazione. |
Nota
Sul messaggio informativo viene visualizzata la seguente finestra a comparsa: