Esta función ingresa/emite señales relacionadas con la seguridad a través de un terminal redundante. Si se detecta alguna señal diferente de la señal de entrada o salida de seguridad redundante, el sistema determina si se trata de un cortocircuito o un defecto de hardware y detiene el robot con el modo STO Stop.
-
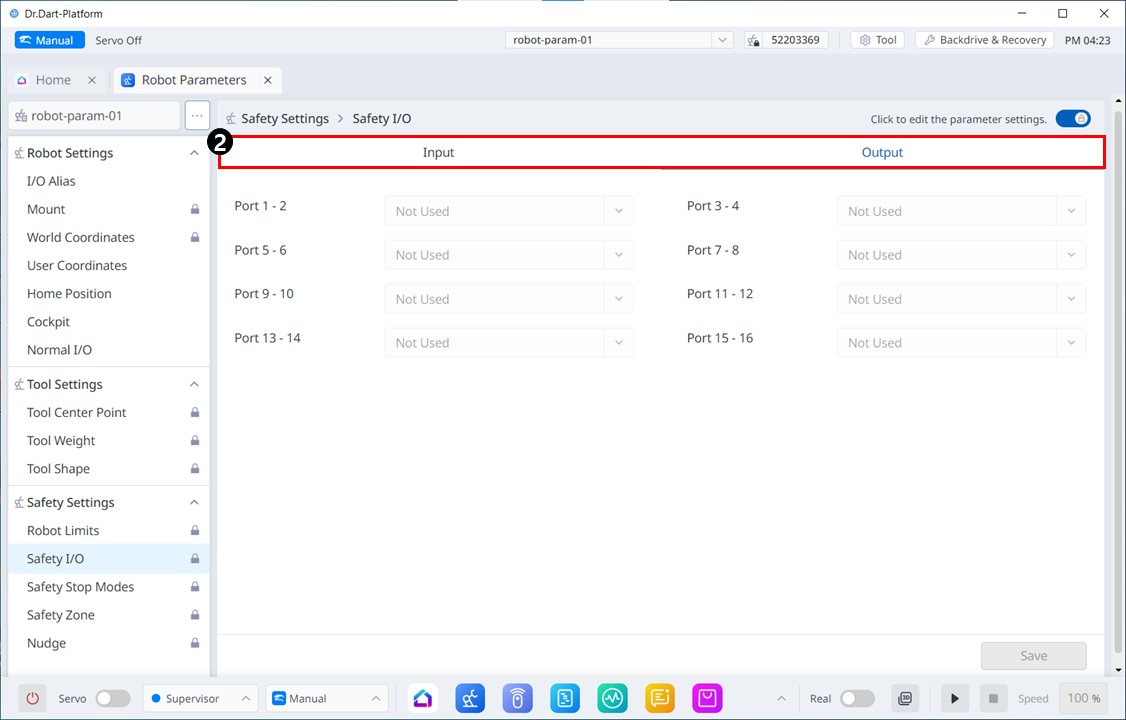
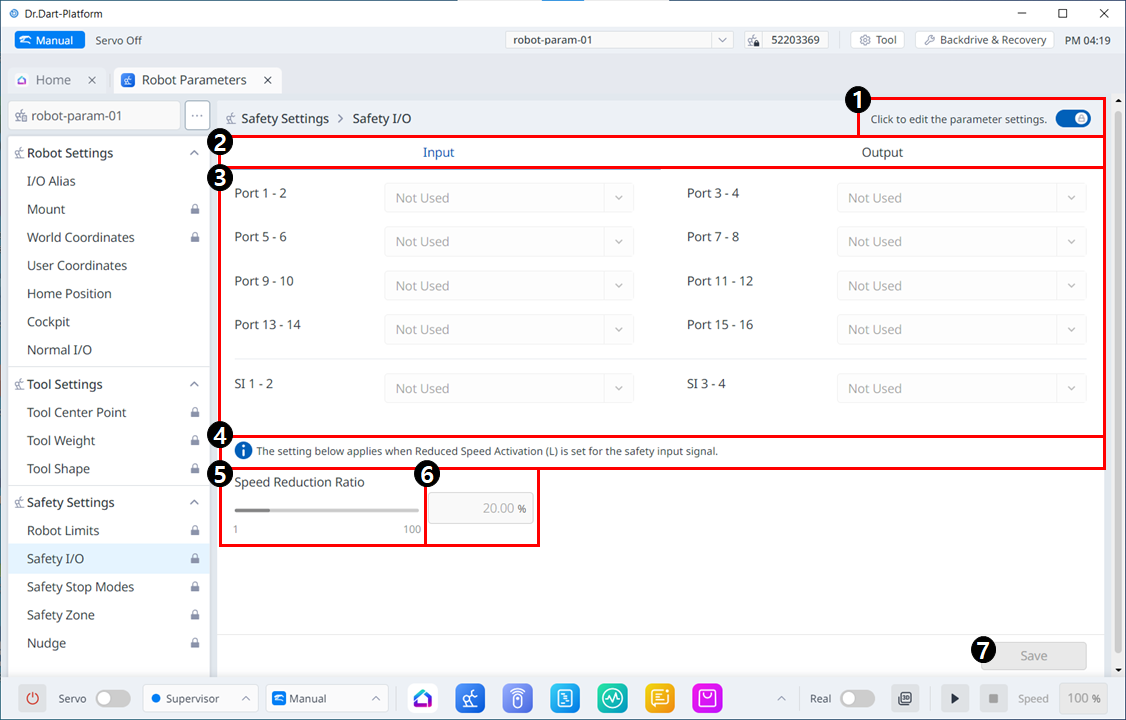
La señal de seguridad E/S) se puede configurar en Parámetros del robot > Ajustes de seguridad > E/S de seguridad.
Para obtener más información, consulte E/S de señal de seguridad.
Elementos de menú
|
|
Elemento |
Descripción |
|---|---|---|
|
1 |
Botón de conmutación de bloqueo |
Se utiliza para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
|
2 |
Entrada/salida |
Se puede seleccionar Entrada/Salida para que se establezca. |
|
3 |
Lista de puertos |
Esta es una lista de puertos en la categoría correspondiente. Los menús desplegables incluyen: No se utiliza
|
|
4 |
Mensaje de precaución |
Una nota de precaución para configurar la E/S de seguridad |
|
5 |
Control deslizante de velocidad de reducción |
Puede utilizar el control deslizante para establecer la relación de reducción de velocidad. |
|
6 |
Entrada de tasa de reducción de velocidad |
La tasa de reducción de velocidad se puede introducir directamente. Se puede ajustar de 0 a 100 %. |
|
7 |
Guardar |
Este botón le permite guardar la configuración introducida. |
La pantalla Salida aparece de la siguiente manera, similar a Entrada.