Ajuste de desplazamiento
Si el robot se detiene en la zona de colaboración debido al modo de parada de seguridad SS2 o RS1, , El restablecimiento no está disponible en estado interrumpido, pero el trabajo se puede reanudar con la entrada de impulso
-
Para establecer el desplazamiento, seleccione Robot > Elemento de desplazamiento en la celda de trabajo del robot.
Para obtener más información, consulte Nudge.
Elementos de menú
|
|
Elemento |
Descripción |
|---|---|---|
|
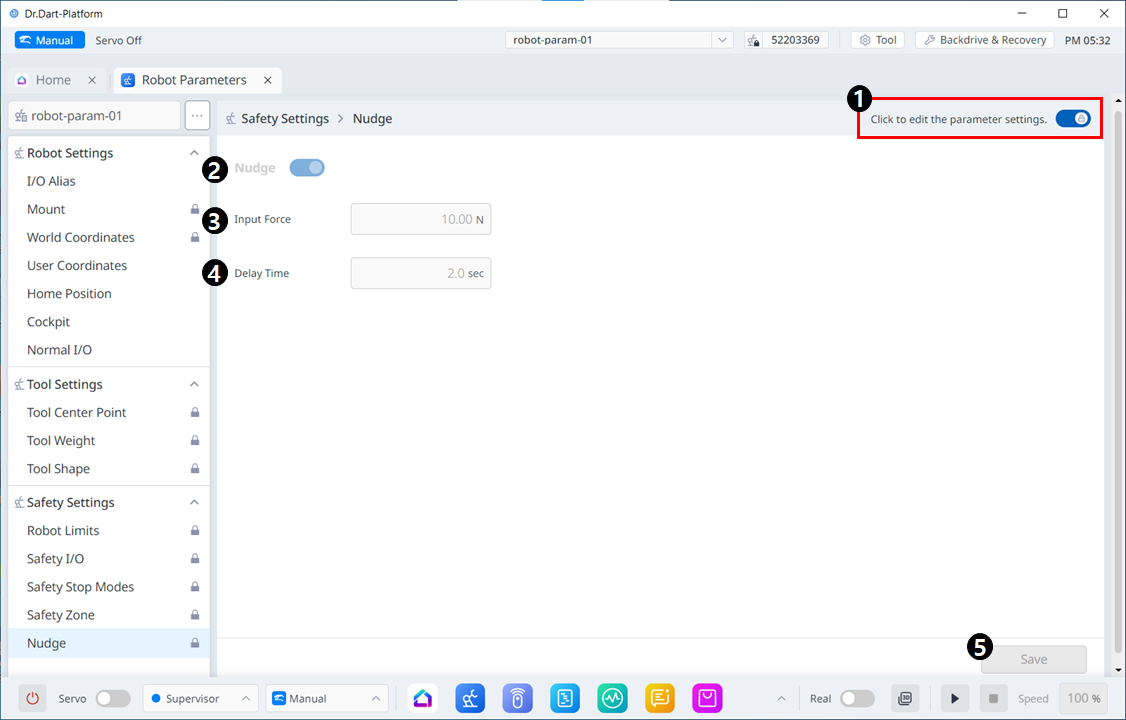
1 |
Botón de conmutación de bloqueo |
Se utiliza para bloquear el valor establecido. La contraseña de seguridad es necesaria para modificar el valor establecido. |
|
2 |
Si utilizar Nudge |
Este botón le permite elegir si desea utilizar Nudge. |
|
3 |
Forzar entrada |
Este campo es donde se introduce el valor de fuerza deseado. |
|
4 |
Tiempo de retardo |
Este campo es donde se establece el tiempo de retardo. |
|
5 |
Guardar |
Este botón le permite guardar el valor establecido. |