Para mover el robot en un ángulo específico, siga estos pasos:
-
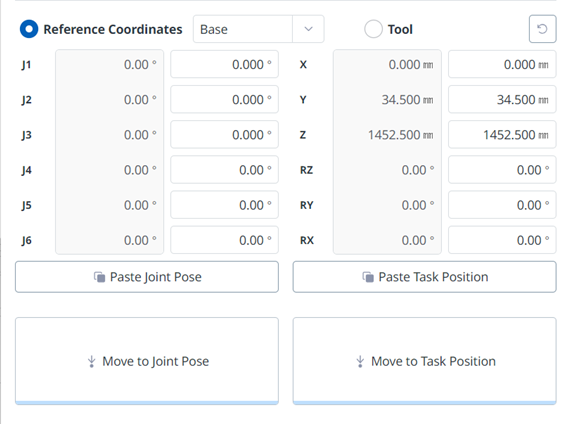
Seleccione la pestaña Mover
-
Introduzca el ángulo objetivo de la junta del robot.
-
Active el modo real.
-
Mantenga pulsado el botón Mover a la posición correspondiente para ajustar el ángulo de la junta del robot.