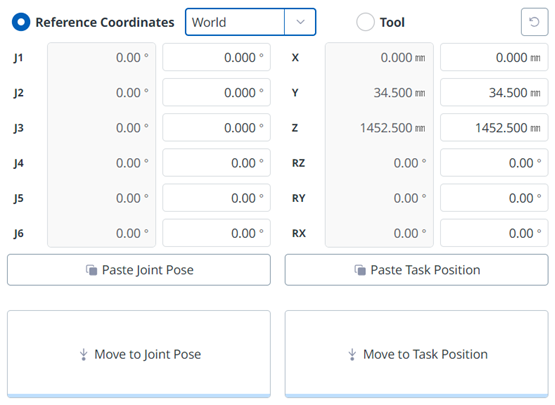
Para mover el robot en función de las coordenadas del mundo, siga estos pasos:
-
Seleccione la pestaña Mover y Coordenadas de referencia.
-
Seleccione Mundo como coordenadas de visualización y seleccione la ficha Mundo.
-
Configure la pose para moverse con referencia a las coordenadas del mundo.
-
Mantenga pulsado el botón Mover a la posición correspondiente para ir a las coordenadas establecidas.