空间限制和区域设置概述。
有关空间限制和区域的更多信息,请参阅 第1部分。安全手册,其中包括以下主题。
区域的空间限制和形状概述
如何设置 空间限制/区域的形状 如下。
项目 | 说明 |
|---|
立方体 | 空间限制/区域的形状 创建为立方体。 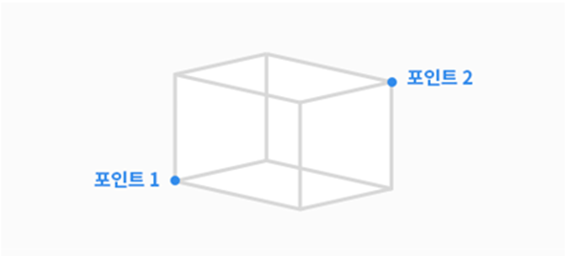 |
倾斜的立方体 | 空间限制 /区域的形状 创建为倾斜的立方体。 按4个点设置 输入倾斜立方体的参考点(点1),x轴终点(点2),y轴终点(点3)和z轴终点(点4),然后点击Save Position (保存姿势)按钮。 3条线(点1-Point2,点1-Point 3,点1-Point 4)必须以直角相互交叉。(可接受+/- 5度的偏差) 如果您使用Cockpit中的"基准面约束"和"轴约束"等约束运动函数,并使用点1作为参考点,则更容易找到点2,点3和点4的点。
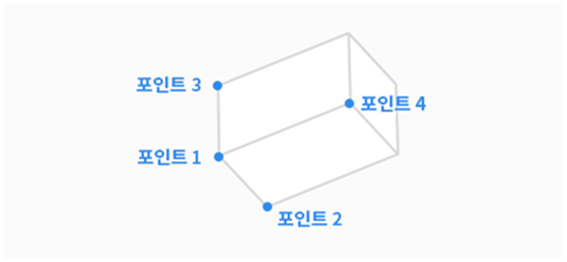 按3点和高度设置 输入参考点(点1),x轴上的点(点2)和xy平面上的点(点3)。 点在xy平面(点3)上的位置决定了y轴的方向,y轴与参考点(点1)和x轴上的点(点2)形成的线垂直,并且位于xy平面上。 一旦确定了参考点,x轴方向和y轴方向,z轴方向将由右侧规则确定。 确定参考点和三个轴方向后,可通过设置长度,宽度和高度来指定倾斜立方体的大小。 通过设置x,y和z偏移量,可平行移动倾斜立方体(平行平移)。 到达倾斜立方体的终点(顶点)后,按 实际点1旁边的"移动到",然后按 实际点2, 实际点3或 实际点4旁边的"移动到",机器人TCP将沿倾斜立方体的边缘尽可能移动它。可以通过这种方式验证倾斜立方体的位置和方向设置。
 |
气缸 | 空间限制/区域的形状 创建为圆柱体。 输入半径距离处的点,上方平面的点和圆柱下方平面的点,然后轻触保存姿势按钮。 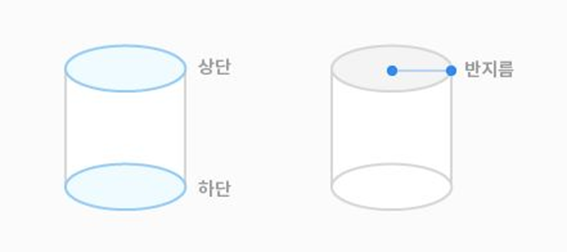 |
多平面框 | 空间限制/区域的形状 创建为多平面框。 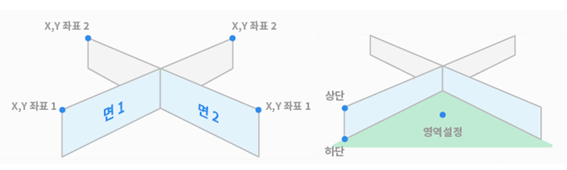 |
球体 | 空间限制/区域的形状 创建为球体。  |
