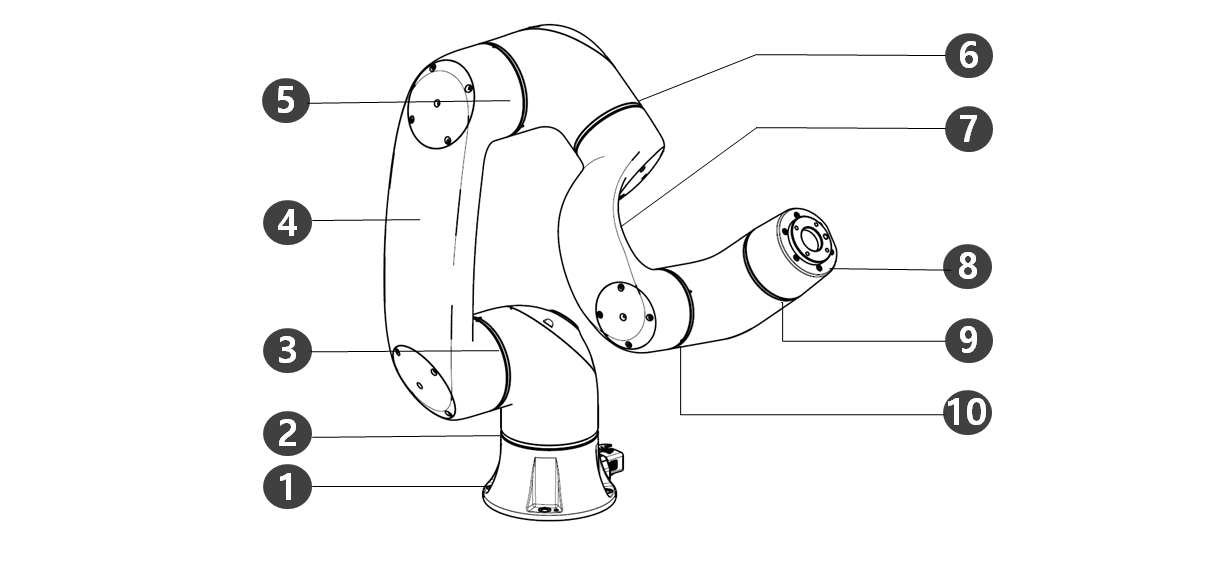
机械手
零件名称
|
否 |
名称 |
否 |
名称 |
|---|---|---|---|
|
1. |
基座 |
6. |
J4 |
|
2. |
J1 |
7. |
Link2 |
|
3. |
J2 |
8. |
工具法兰 |
|
4. |
Link1 |
9. |
J5 |
|
5. |
J3 |
10. |
J6 |
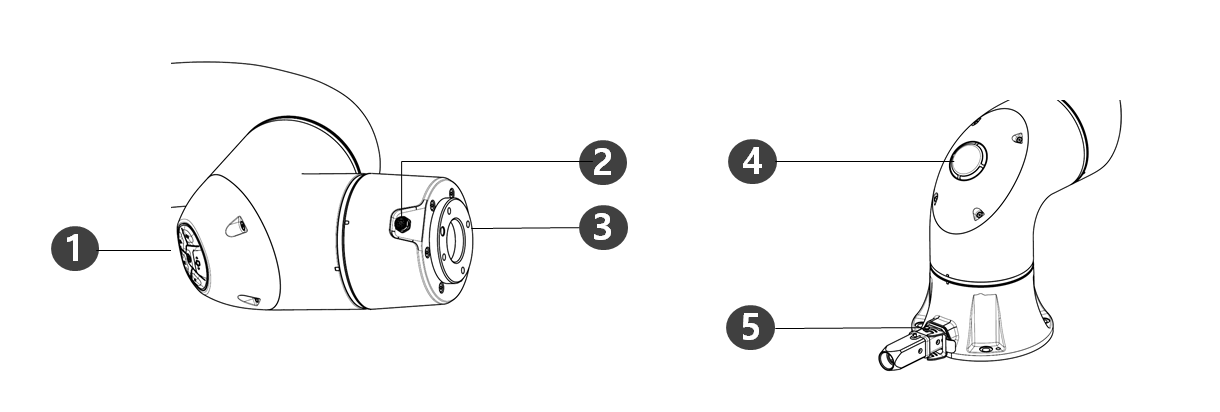
主要功能
|
否 |
项目 |
说明 |
|---|---|---|
|
1. |
驾驶舱 |
[选项]用于直接教学的控制器。 |
|
2. |
法兰I/O |
用于工具控制的I/O端口。
|
|
3. |
工具法兰 |
安装工具的区域。 |
|
4. |
指示灯 |
以不同的颜色显示机械手状态。有关机械手状态的详细信息,请参见""。 /wiki/spaces/TESMT/pages/54503722 |
|
5. |
连接器 |
用于为机械手供电和通信。 |
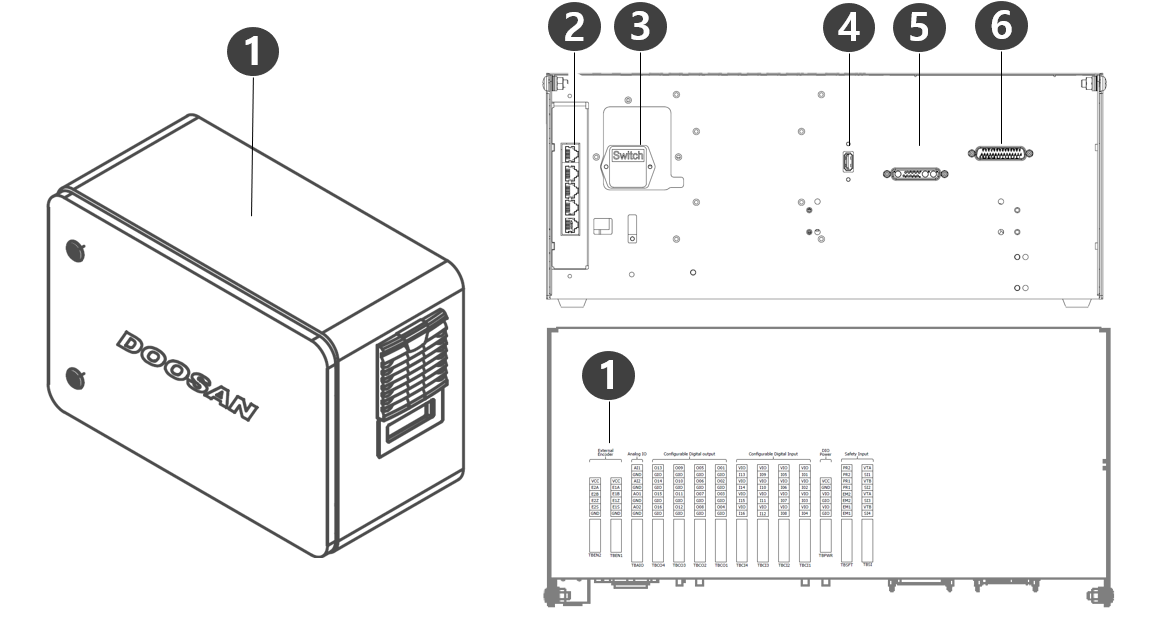
控制器
|
否 |
项目 |
说明 |
|---|---|---|
|
1. |
I/O连接端子(内部) |
它可以与其他机器人的控制器或外围设备连接。 |
|
2. |
网络连接终端 |
用于连接到控制器内的网络连接终端,以使用膝上型计算机,TCP/IP设备和Modbus设备。 |
|
3. |
电源连接端子/开关 |
用于连接控制器的主电源以打开或关闭控制器。 有关详细信息 打开/关闭系统电源,请参见。 |
|
4. |
USB连接终端 |
用于存储机器人在USB存储器中操作时创建的日志,或导出和导入任务。 |
|
5. |
机械手电缆连接端子 |
用于将机械手电缆连接到控制器。 |
|
6. |
示教线控器电缆连接端子 |
用于将示教线控器电缆连接到控制器。 |
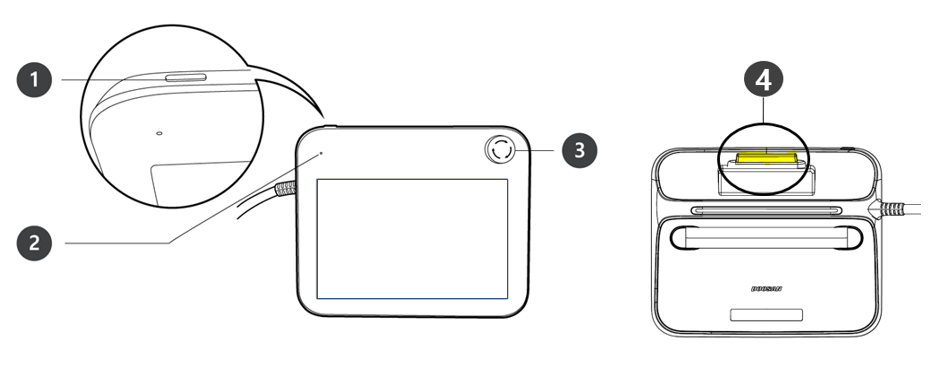
示教手控盒
|
否 |
项目 |
说明 |
|---|---|---|
|
1. |
电源按钮 |
|
|
2. |
电源指示灯 |
|
|
3. |
紧急停机按钮 |
|
|
4. |
手动导向按钮 (3PE 3 Position Enable) Switch) |
|
-
如果在操作过程中需要保护和安装示教手控盒,我们提供的软盖使其更安全,更易于使用。
-
新 TP(TP-02)增加功能:手导双重功能
-
现有 TP(TP-01)无法在集成控制器中使用。(由于 3PE 开关,引脚图发生变化)
-
新 TP(TP-02)可以在现有控制器中使用,但 LED 更改为单色(红色)并显示,并且无法使用附加功能。
-