菜单项
|
|
项目 |
说明 |
|---|---|---|
|
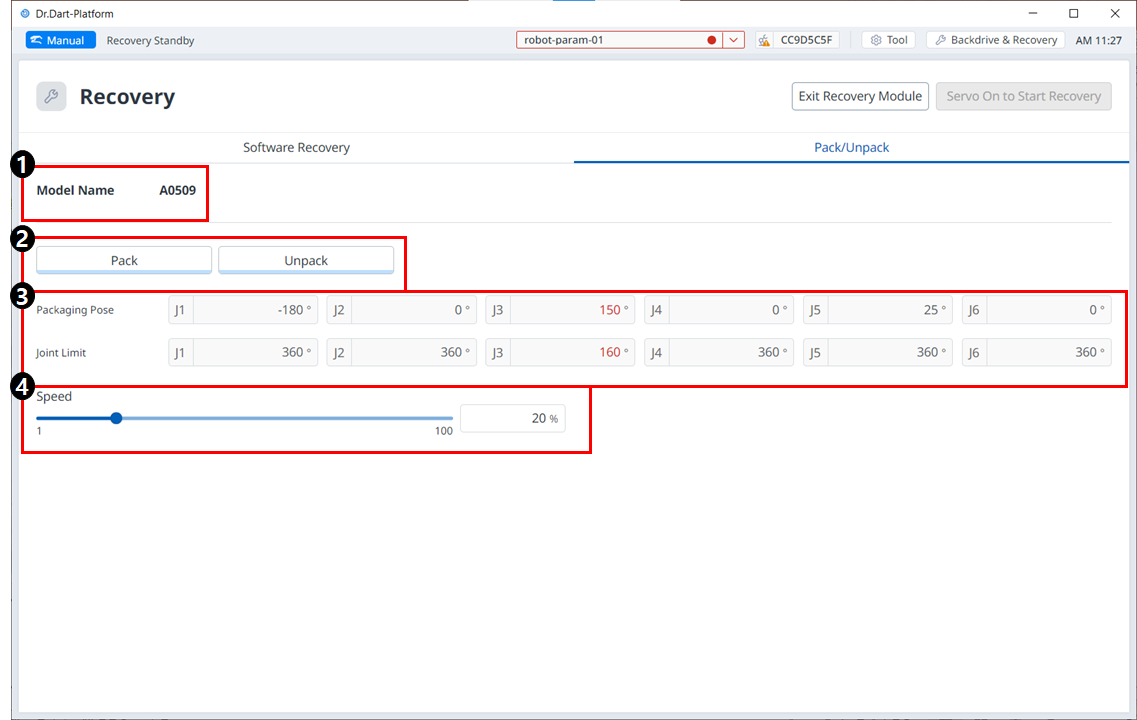
1. |
型号名称 |
此时将显示连接的机械手模型的名称。 |
|
2. |
包装/拆开包装 |
可以选择"打包"或"解包"。 |
|
3. |
包装姿势/接合限制 |
此时将显示姿势和关节限值。 |
|
4. |
速度比 |
可以通过滑块或输入来调整包装或解包模式的速度。 |
要配置打包模式,请执行以下步骤:
-
点击 标题窗格中的恢复菜单。

-
选择 包装模式 选项卡。

-
要启用打包模式,请轻触 伺服启动恢复 按钮。

-
机械手自动移动到设定的包装姿势。使用"打包 "按钮可以将机械手置于"打包"位置, 使用"解包 "按钮可以将机械手置于"默认原点"位置。