
각 부 명칭과 기능
매니퓰레이터
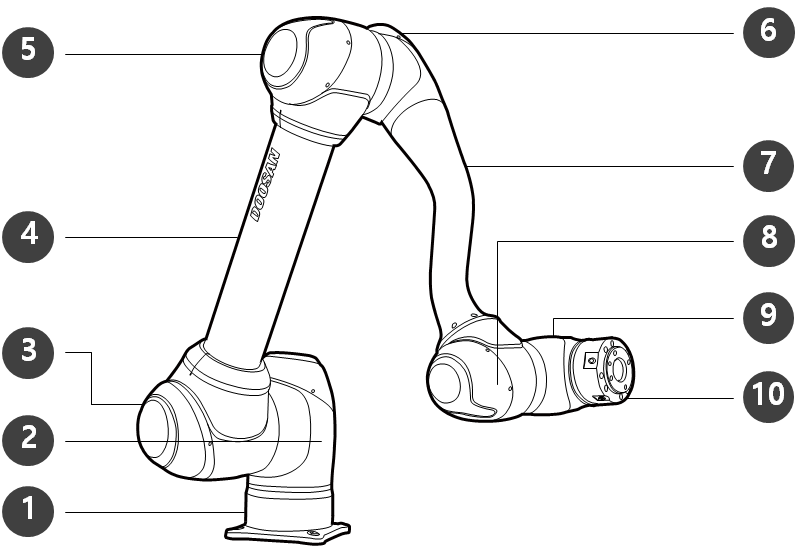
각부의 명칭
No. | 이름 | No. | 이름 |
|---|---|---|---|
1 | 베이스 (Base) | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | J5 |
4 | Link1 | 9 | J6 |
5 | J3 | 10 | 툴 플랜지(Tool Flange) |
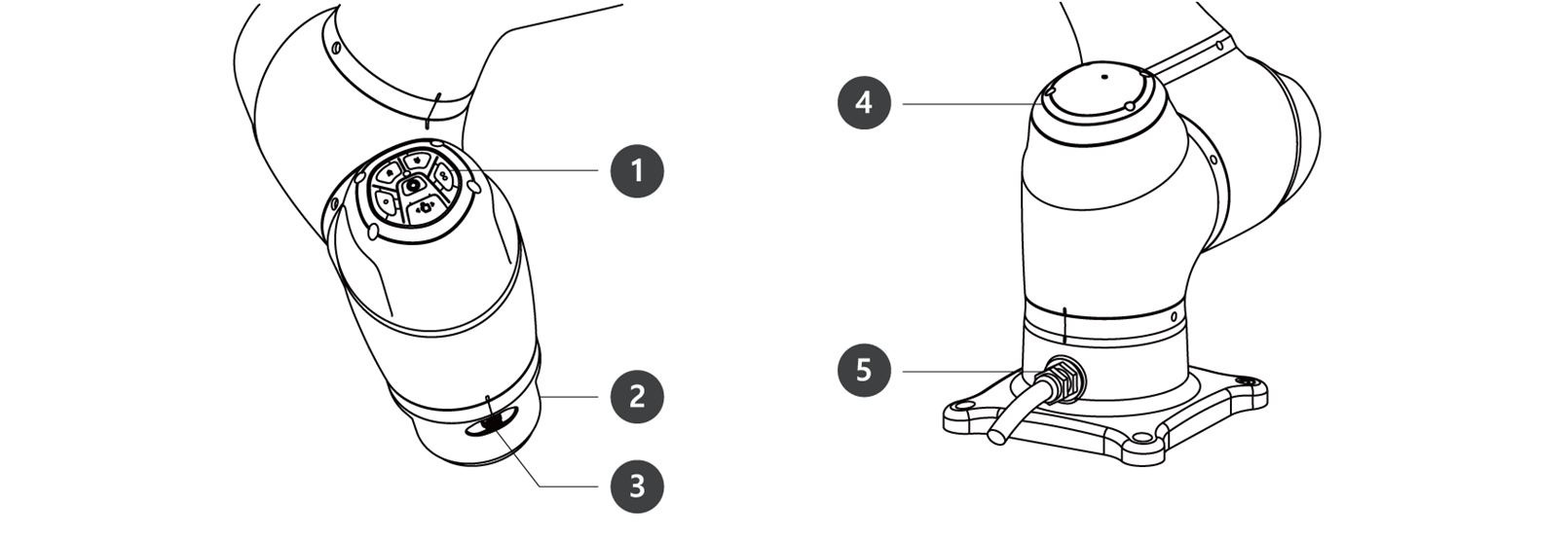
주요 기능
No. | 항목 | 설명 |
|---|---|---|
1 | 콕핏(Cockpit) | [옵션] 직접 교시를 위한 콘트롤러입니다. |
2 | 툴 플랜지 | 툴을 장착하는 부위입니다. |
3 | 플랜지 I/O | 툴 제어를 위한 입출력 포트입니다. (디지털 입력 2ch, 출력 2ch) |
4 | LED(1축) | 로봇의 상태를 색상으로 표시합니다. 로봇 상태에 대한 자세한 내용은 “ 모드별 상태와 플랜지 LED 색상”을 참조하십시오. |
5 | 커넥터 | 로봇의 전원 인가 및 통신에 사용됩니다. |
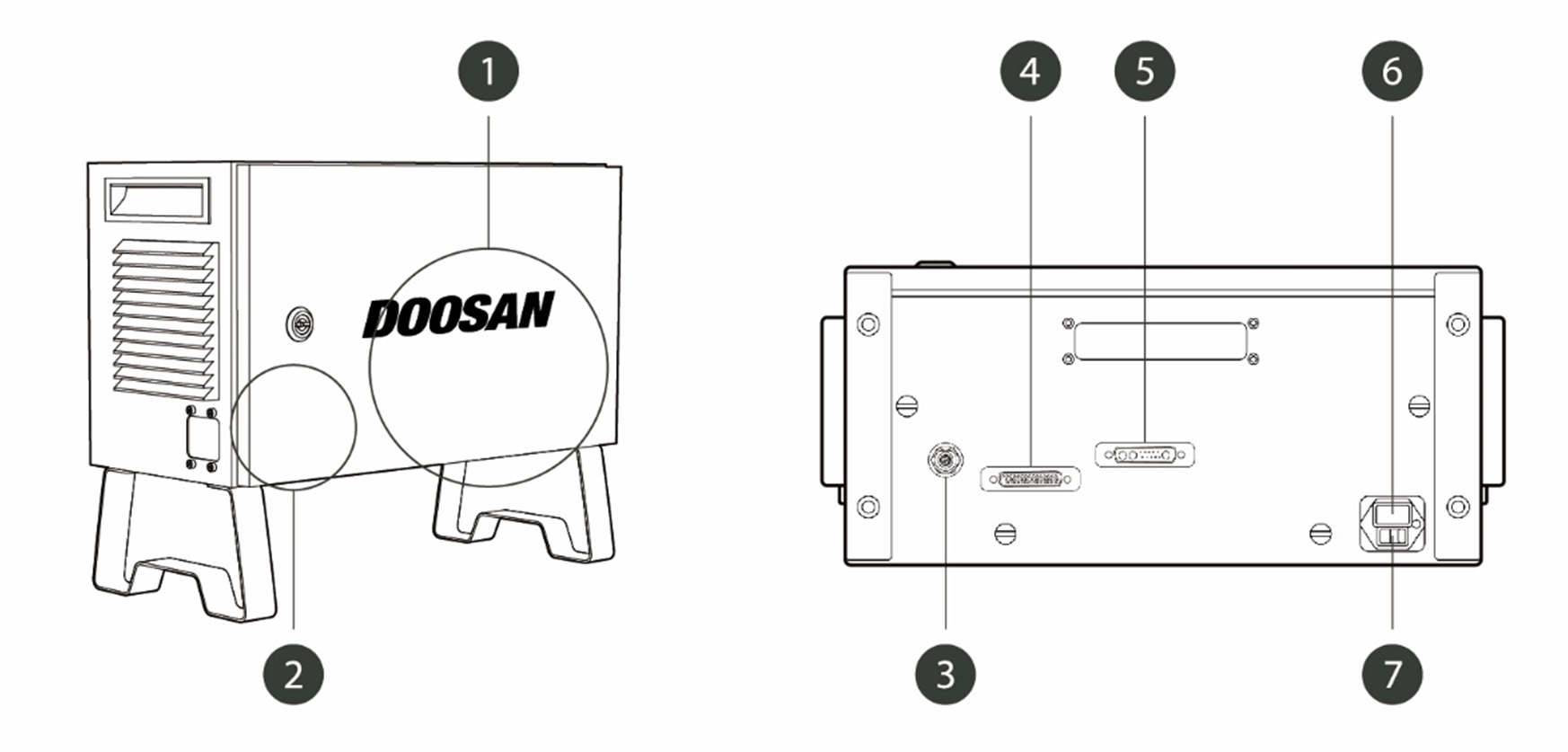
컨트롤러
No. | 항목 | 설명 |
|---|---|---|
1 | I/O 연결 단자 (내부) | 다른 로봇의 컨트롤러나 주변 기기와 연결할 수 있습니다. |
2 | 비상정지 버튼 설정 스위치 (내부) | 티치펜던트, 스마트 펜던트 또는 비상 정지 버튼 사용을 위해 반드시 스위치를 실제 구성에 맞게 설정해야 합니다. 경고
|
3 | 비상정지 버튼 및 스마트 펜던트 연결 단자 | 비상 정지 버튼 또는 스마트 펜던트의 케이블을 컨트롤러와 연결합니다. |
4 | 티치펜던트 케이블 연결 단자 | 티치펜던트의 케이블을 컨트롤러와 연결합니다. |
5 | 매니퓰레이터 케이블 연결 단자 | 매니퓰레이터의 케이블을 컨트롤러와 연결합니다. |
6 | 전원 연결 단자 | 컨트롤러의 전원을 연결합니다. |
7 | 전원 스위치 | 컨트롤러의 주 전원을 켜거나 끌 수 있습니다. 자세한 내용은 시스템 전원 켜기/끄기 를 참고하십시오. |
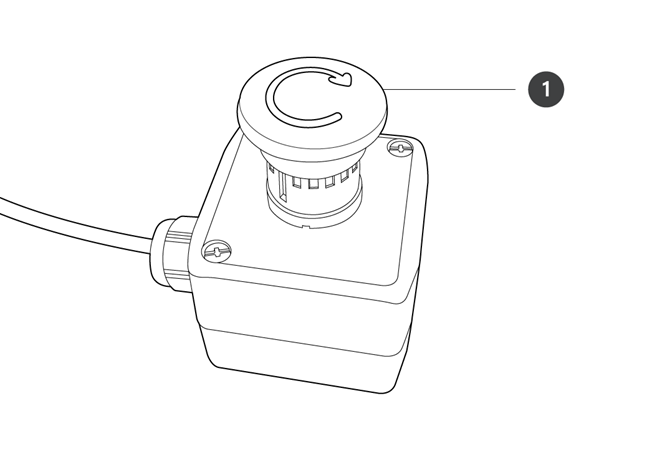
비상 정지 버튼
No. | 항목 | 설명 |
|---|---|---|
1 | 비상 정지 버튼 | 긴급한 상황이 발생한 경우 버튼을 눌러 로봇의 작동을 멈출 수 있습니다. |
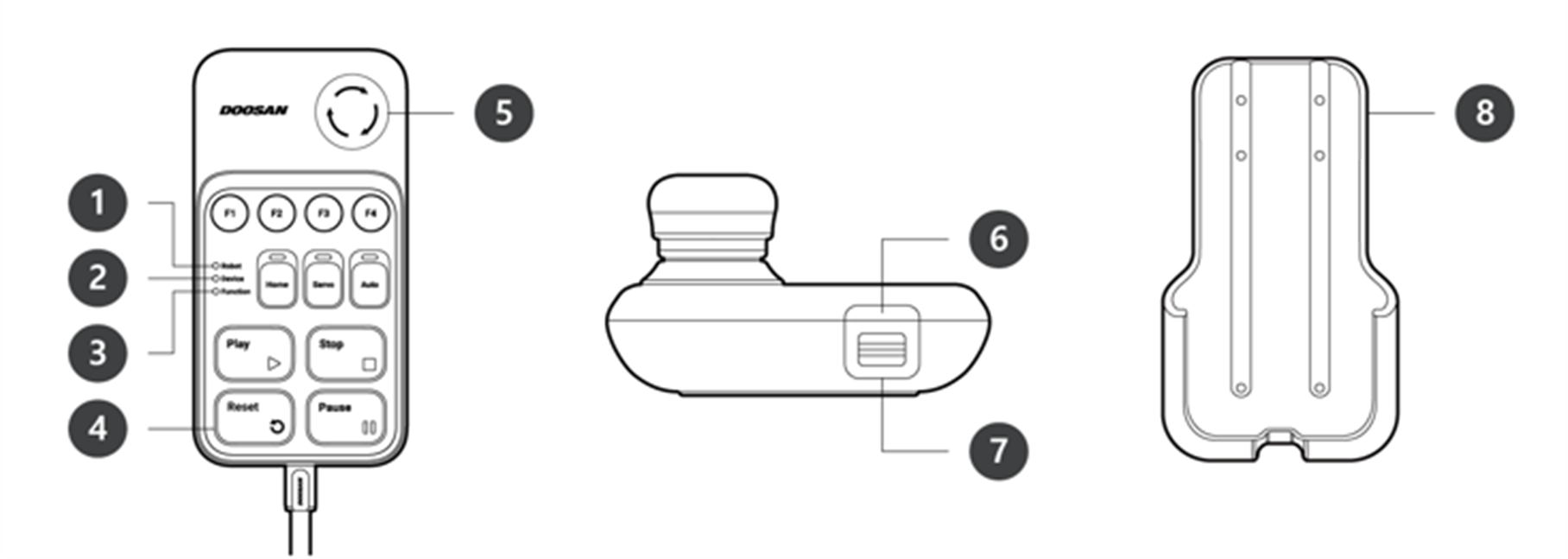
스마트 펜던트
스마트 펜던트는 기본 구성품이 아닌 옵션 제품으로 별도 구매가 필요합니다. 제품에 관한 자세한 기능은 부록. 스마트 펜던트(A Series)를 참고하십시오.
No. | 항목 | 설명 |
|---|---|---|
1 | Robot LED | 로봇의 상태 LED와 같은 색을 사용자에게 보여주어 로봇의 상태를 알려줍니다. |
2 | Device LED | 스마트 펜던트 모드에 진입 여부를 알려줍니다. |
3 | Function LED | 4개의 Input signal button(F1~F4)가 눌리면 LED가 점등되어 눌림 상태를 알려줍니다. |
4 | 버튼부 | 기능별로 4개의 Input signal button(F1~F4), Home, Servo, Auto, Play, Stop, Reset, Pause 총 11개의 버튼이 있습니다. |
5 | 비상 정지 버튼 | 긴급한 상황이 발생한 경우 버튼을 눌러 로봇의 작동을 멈출 수 있습니다. |
6 | 전원 버튼 | 스마트 펜던트의 주 전원을 켜거나 끌 수 있습니다. |
7 | 스트랩 고정부 | 줄 등을 고정시켜 사용 가능합니다. |
8 | 거치 브라켓 | 거치 브라켓을 벽에 고정시켜 스마트 펜던트를 보관할 수 있습니다. |
알아두기
- SW V2.8 이상의 버전을 사용하는 고객의 경우, 스마트 펜던트의 Resume 버튼에 Reset 라벨을 부착하여 사용하시기 바랍니다.
- SW V2.8 보다 낮은 버전을 사용하는 고객의 경우, 스마트 펜던트에서 Reset 기능이 아닌 Resume 기능으로 동작하므로 Reset 라벨의 부착을 필요로 하지 않습니다.
- 사용 중 라벨이 탈락될 수 있으니 사용에 주의하시기 바랍니다.
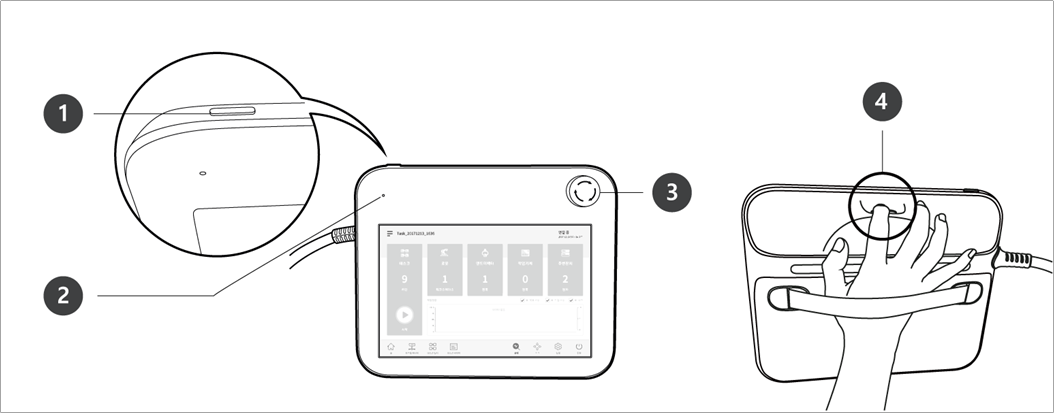
티치펜던트
티치펜던트는 기본 구성품이 아닌 옵션 제품으로 별도 구매 필요
No. | 항목 | 설명 |
|---|---|---|
1 | 전원 버튼 | 티치펜던트의 주 전원을 켜거나 끌 수 있습니다. 자세한 내용은 시스템 전원 켜기/끄기 를 참고하십시오. |
2 | 전원 LED | 전원이 들어오면 불이 켜집니다. |
3 | 비상 정지 버튼 | 긴급한 상황이 발생한 경우 버튼을 눌러 로봇의 작동을 멈출 수 있습니다. |
4 | 핸드 가이딩 버튼 | 버튼을 누른 상태로 로봇을 잡고 원하는 자세로 움직일 수 있습니다. |
알아두기
- 작업 중 티치펜던트 보호 및 거치가 필요할 경우 당사에서 공급하는 소프트커버를 장착하시면 좀 더 안전하고 쉽게 사용할 수 있습니다.