スペース制限とゾーン設定の概要
スペース制限とゾーンの詳細については、 パート1.を参照してください。安全マニュアル。次のトピックが含まれています。
領域制限とゾーンの形状の概要
スペースリミット/ゾーンの形状の設定方法は 以下の通りです。
項目 | 説明 |
|---|
立方体 | スペースリミット/ゾーンのシェイプが立方体 として作成されます。  |
傾いた立方体 | スペースリミット /ゾーンのシェイプは、傾いた立方体 として作成されます。 4ポイントによる設定 傾いた立方体の基準点(ポイント1)、x軸の終点(ポイント2)、y軸の終点(ポイント3)、z軸の終点(ポイント4)を入力し、[Save Pose]ボタンをタップします。 3本の直線(点1-点2、点1-点3、点1-点4)が直角に交差している必要があります。(±5度の偏差が許容されます) 点1を基準点として使用してコックピットで「平面拘束」や「軸拘束」などの拘束された動作機能を使用すると、点2、点3、および点4の点がより簡単に見つかります。
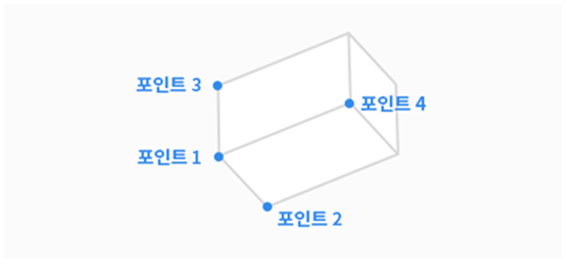 3点と高さによる設定 基準点(点1)、X軸上の点(点2)、およびXY平面上の点(点3)を入力します。 XY平面上の点の位置(点3)によって、Y軸の方向が決まります。Y軸は、基準点(点1)とX軸上の点(点2)によって形成される直線に垂直で、XY平面上に配置されます。 基準点、X軸方向、およびY軸方向が決定されると、Z軸方向は右手の規則によって決定されます。 基準点と3軸方向を決定した後、長さ、幅、高さを設定することで、傾いた立方体のサイズを指定できます。 傾いた立方体は、x、y、zのオフセットを設定することで平行に移動できます(平行移動)。 実際のポイント1の横にある[MOVE TO]を押して傾いた立方体の終点(頂点)に到達した後、 実際のポイント2、 実際のポイント3、または 実際のポイント4の横にある[MOVE TO]を押して、ロボットTCPは傾いた立方体の端に沿って、到達できる限り移動します。傾いた立方体の位置と方向の設定は、この方法で確認できます。
 |
シリンダ | スペースリミット/ゾーンのシェイプが シリンダとして作成されます。 半径距離の点、上の平面の点、およびシリンダの下の平面の点を入力し、[Save Pose]ボタンをタップします。 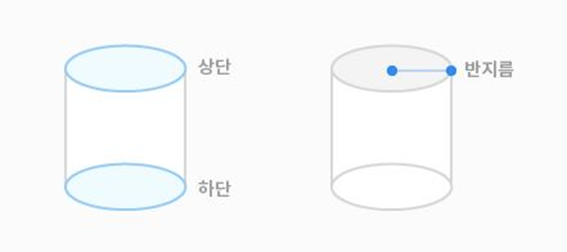 |
複数平面ボックス | スペースリミット/ゾーンのシェイプは、 複数平面ボックスとして作成されます。 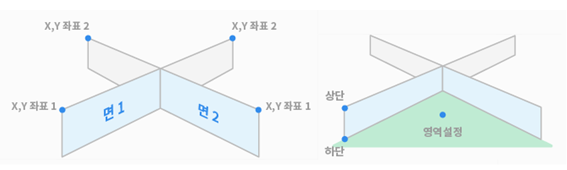 |
球 | スペースリミット/ゾーンのシェイプが 球として作成されます。 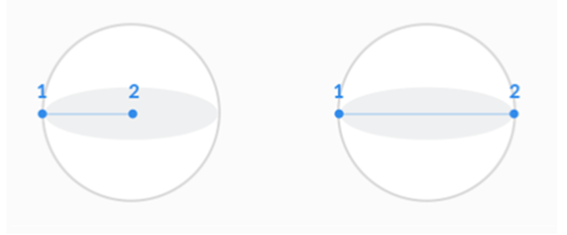 |
