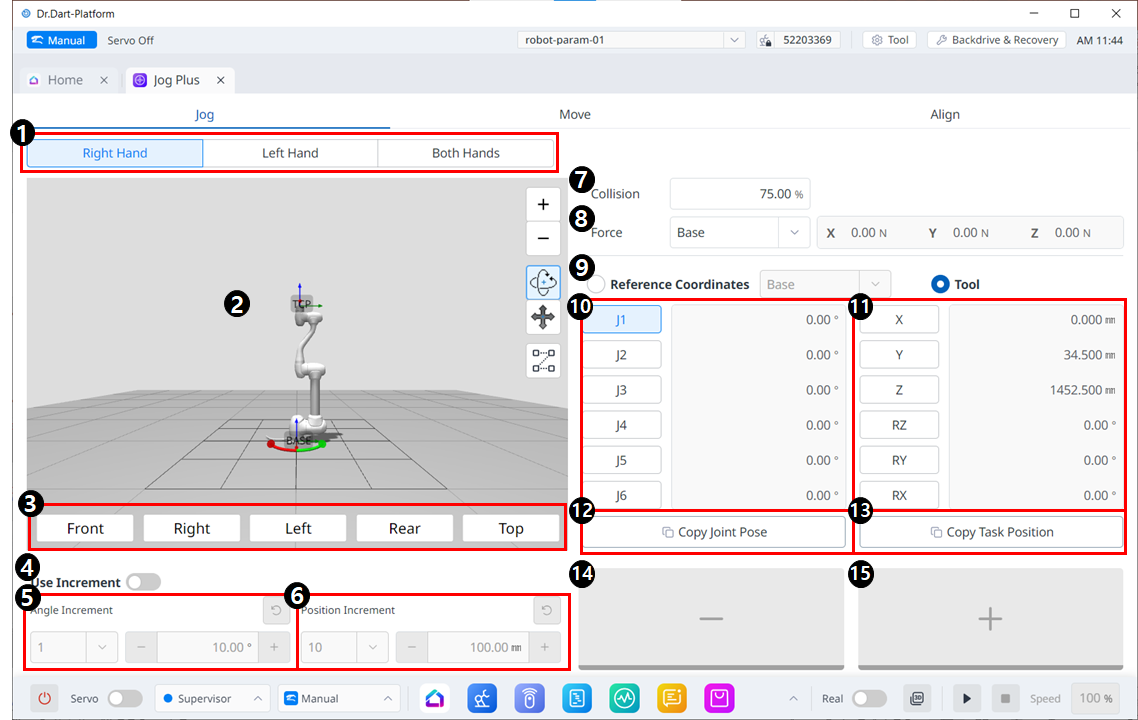
Layout del menu jog
|
|
항목 |
설명 |
|---|---|---|
|
1 |
Seleziona il tipo di pannello |
Puoi scegliere la posizione del pulsante di spostamento. |
|
2 |
Simulazione 3D |
Questo è il visualizzatore 3D, dove puoi vedere come appare il robot. |
|
3 |
Allineamento del simulatore |
È possibile utilizzare questa sezione per guidare il simulatore. |
|
4 |
Usa Incremento |
Questo pulsante consente di abilitare gli incrementi di angolo o posizione. |
|
5 |
Incremento dell'angolo |
In questa sezione viene impostato l'incremento dell'angolo sull'asse selezionato. |
|
6 |
Incremento di posizione |
In questa sezione viene impostato l'incremento di posizione sull'asse selezionato. |
|
7 |
Collisione |
In questo campo si imposta la collisione del robot. |
|
8 |
Monitoraggio della forza |
In questa sezione è possibile impostare le forze negli assi X, Y e Z in base a Base, Strumento, Mondo, Riferimento e tra gli altri. |
|
9 |
Seleziona il sistema di coordinate di riferimento |
Selezionare un sistema di coordinate di riferimento per visualizzare o spostare le coordinate dell'attività nella Figura 11. Può essere le coordinate Base, Mondiale o Utente. |
|
10 |
Pannello congiunto |
È possibile selezionare l'asse del giunto da spostare. |
|
11 |
pannello delle attività |
È possibile selezionare l'asse dell'attività da spostare. |
|
12 |
Pulsante Copia posa J |
Questo pulsante ti consente di copiare la Posa J. |
|
13 |
Pulsante Copia posa X |
Questo pulsante ti consente di copiare la Posa X. |
|
14 |
Sposta - Pulsante |
È possibile far muovere il robot nella direzione - in base a ciascun asse. A questo punto, puoi capire la direzione di - e + nella simulazione 3D sul lato sinistro. |
|
15 |
Sposta + pulsante |
Puoi far muovere il robot nella direzione + in base a ciascun asse. A questo punto, puoi capire la direzione di - e + nella simulazione 3D sul lato sinistro. |