Menù Allinea
|
|
항목 |
설명 |
|---|---|---|
|
1 |
Coordinates |
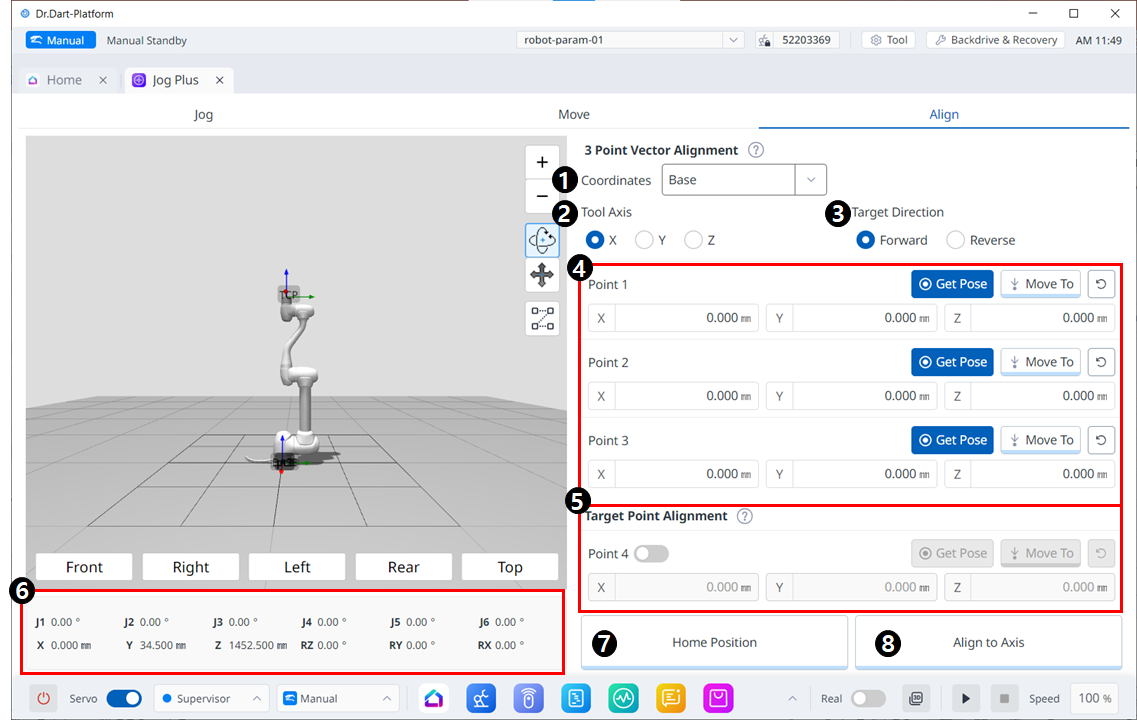
Selezionare il sistema di coordinate di riferimento per le posizioni nelle Figure 4 e 5. |
|
2 |
Tool Axis |
Selezionare quale asse del TCP allineare. |
|
3 |
Target direction |
Selezionare la direzione avanti/indietro |
|
4 |
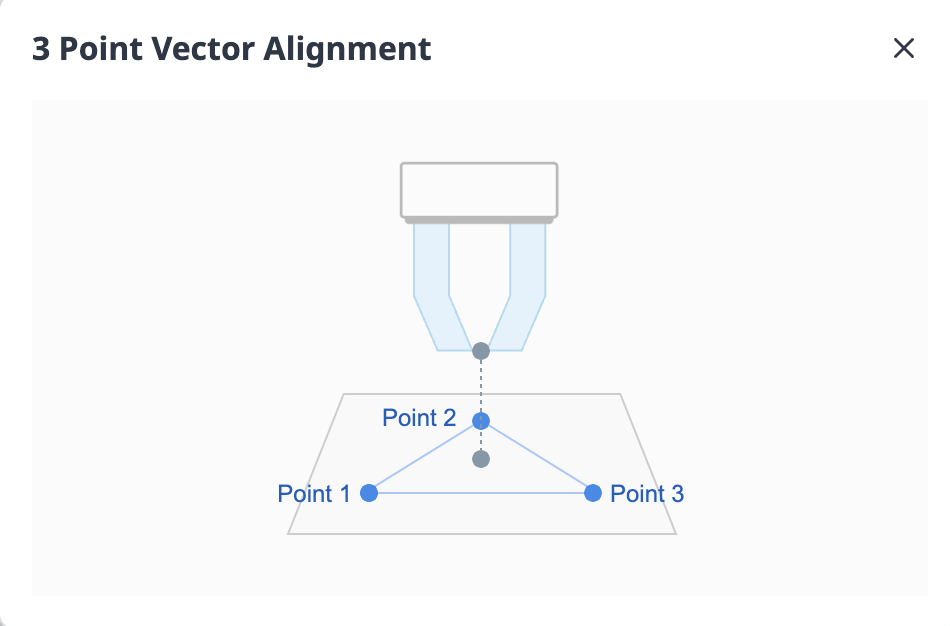
Pick points on a plane |
Scegli tre punti per definire il piano. Le definizioni sono le seguenti: |
|
5 |
Target Point Alignment |
Selezionare un punto in cui posizionare il TCP. Questo è facoltativo e, se deselezionato, verrà ordinato solo l'orientamento dalla posizione corrente. |
|
6 |
Robot Posture |
Visualizza la postura articolare e la postura dell'attività corrente del robot. Per la postura del compito, segue il sistema di coordinate di riferimento selezionato nella Figura 1. |
|
7 |
Home Position |
Quando si fa clic sul pulsante, questo si sposta nella posizione iniziale. |
|
8 |
Align to Axis |
Quando si fa clic sul pulsante, si algina. |