Le coordinate del mondo del robot possono essere impostate dalle coordinate del mondo. Nel caso in cui la coordinata del robot sia la coordinata base, è possibile saltare questo passaggio.
Le coordinate mondiali possono essere impostate in parametri robot > Impostazioni robot > coordinate mondo.
-
Le coordinate mondiali vengono utilizzate quando la posizione di installazione della base del robot viene spostata/ruotata fisicamente.
-
La modifica delle coordinate mondiali applicherà la stessa mossa/rotazione alla schermata del simulatore del robot.
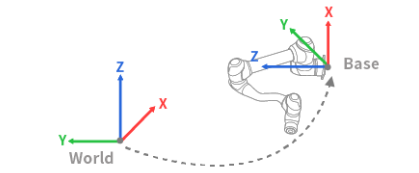
Le coordinate mondiali possono essere utilizzate anche dopo che la posizione della base e l'angolo sono stati modificati dopo l'apprendimento del robot. Se le coordinate delle attività create in passato tramite l'apprendimento del robot vengono modificate da BASE a MONDO, a tutte le coordinate di movimento viene applicato un offset corrispondente alla rotazione/spostamento delle coordinate del mondo.
Layout menu
|
|
Elemento |
Descrizione |
|---|---|---|
|
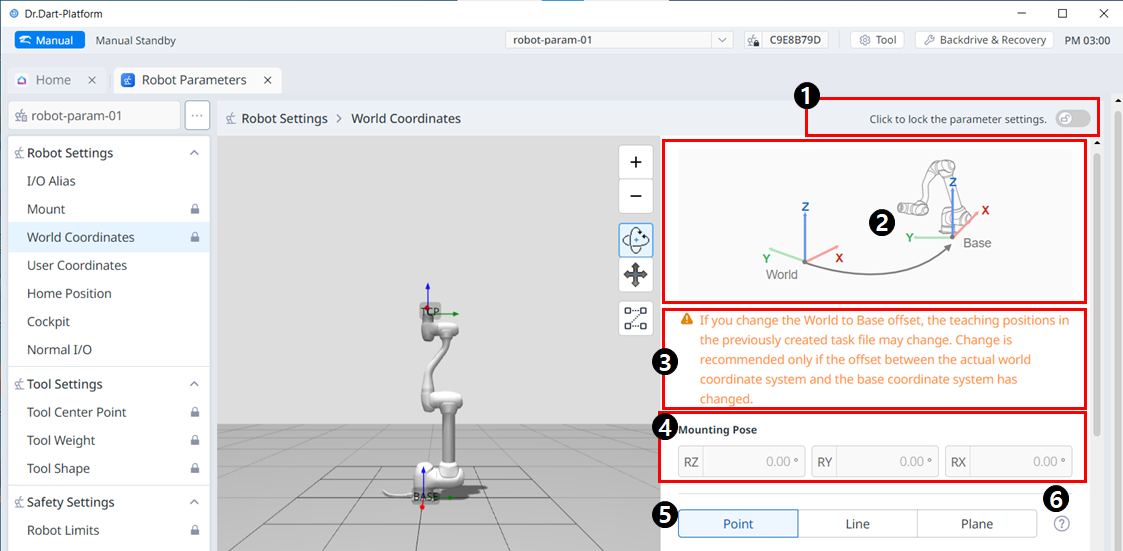
1 |
Pulsante di attivazione/disattivazione blocco |
Utilizzato per bloccare il valore impostato. La password di sicurezza è necessaria per modificare il valore impostato. |
|
2 |
Immagine informativa |
Questa è un'immagine informativa necessaria per l'impostazione. |
|
3 |
Messaggio informativo |
Questo è un messaggio informativo necessario per l'impostazione. |
|
4 |
Posa di montaggio |
Questa sezione include i valori di posa di montaggio per A, B e C. |
|
5 |
Impostazioni punto, linea e piano |
Qui è possibile selezionare e impostare gli elementi desiderati tra punto, linea e piano. |
|
6 |
Guida didattica |
Questa è una guida per l'impostazione di punto, linea e piano. |
|
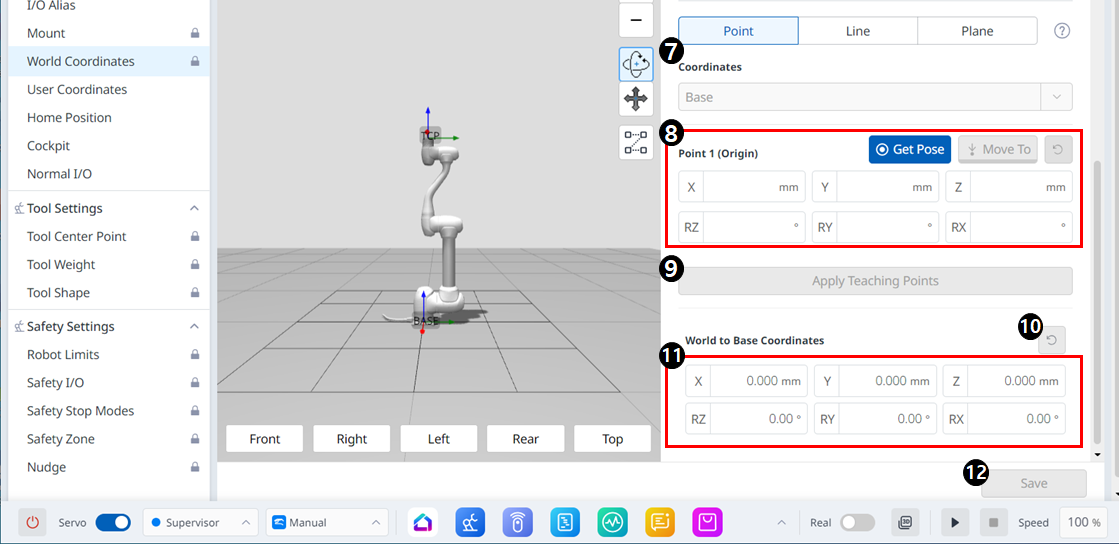
7 |
Coordinate |
Qui è possibile selezionare la coordinata desiderata tra base e mondo. |
|
8 |
Impostazione punto 1 |
Qui è possibile impostare le impostazioni per ciascuno dei 6 assi, nonché mettere in posa e spostarsi su. |
|
9 |
Pulsante Applica punti di apprendimento |
Questo pulsante consente di immettere le impostazioni desiderate e applicarle. |
|
10 |
Ripristino coordinate da mondo a base |
Questo pulsante consente di reimpostare le coordinate World to base già immesse. |
|
11 |
Impostazione coordinate mondo-base |
Qui è possibile immettere le impostazioni per i 6 assi. |
|
12 |
Pulsante Applica |
È possibile applicare il valore di impostazione. |