
Essayez les exemples de commandes de Force
Attention
Avant d'essayer l'échantillon, assurez-vous de lire et de suivre Précautions. Pour plus d'informations, référez-vous à PARTIE 1. Manuel de sécurité.
Remarque
Cet exemple nécessite le fichier du rédacteur de tâches créé dans les Essayez les exemples de commandes de Compliance.
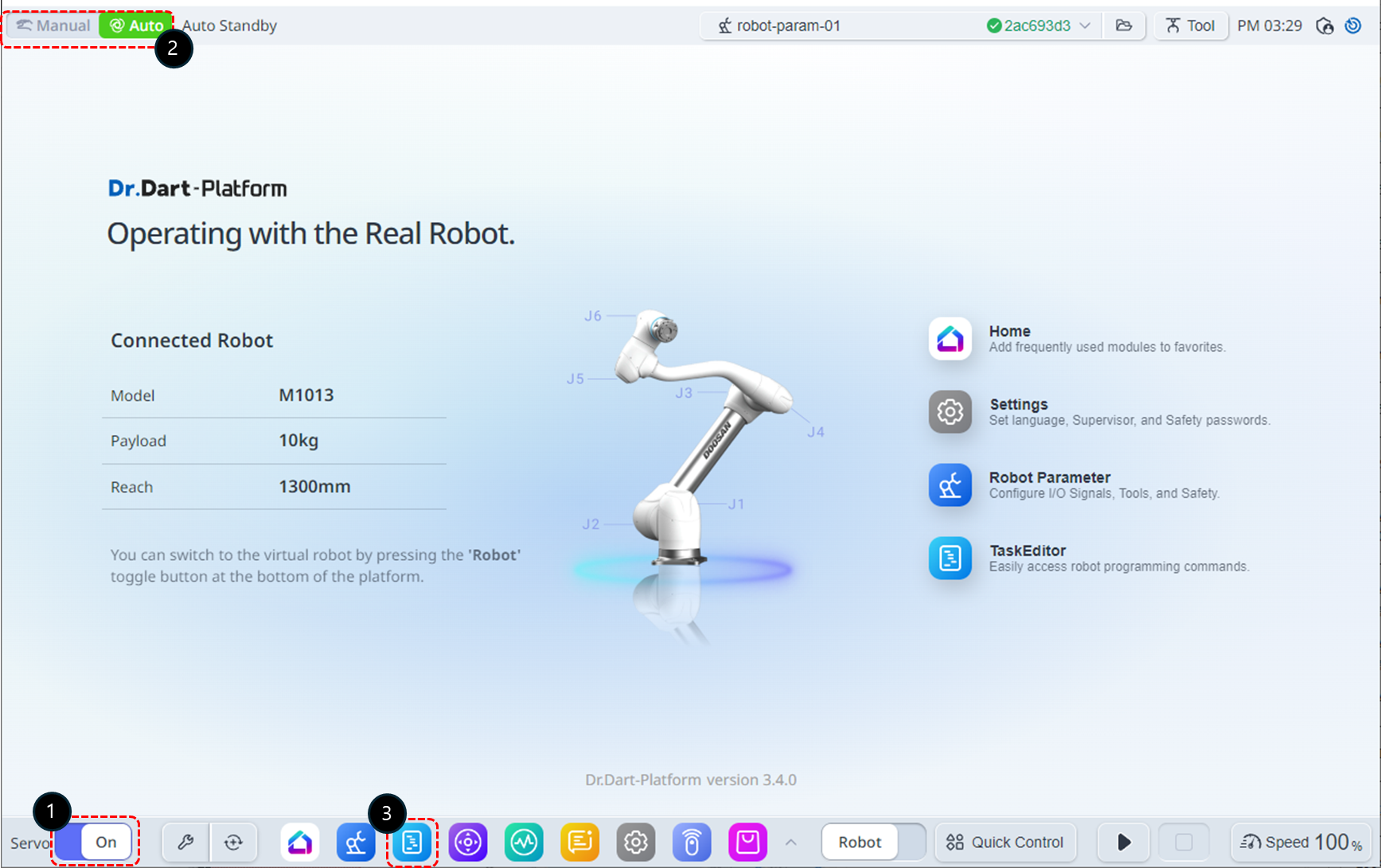
Réglez l'état du servomoteur sur on.
Réglez le mode de fonctionnement sur Manuel.
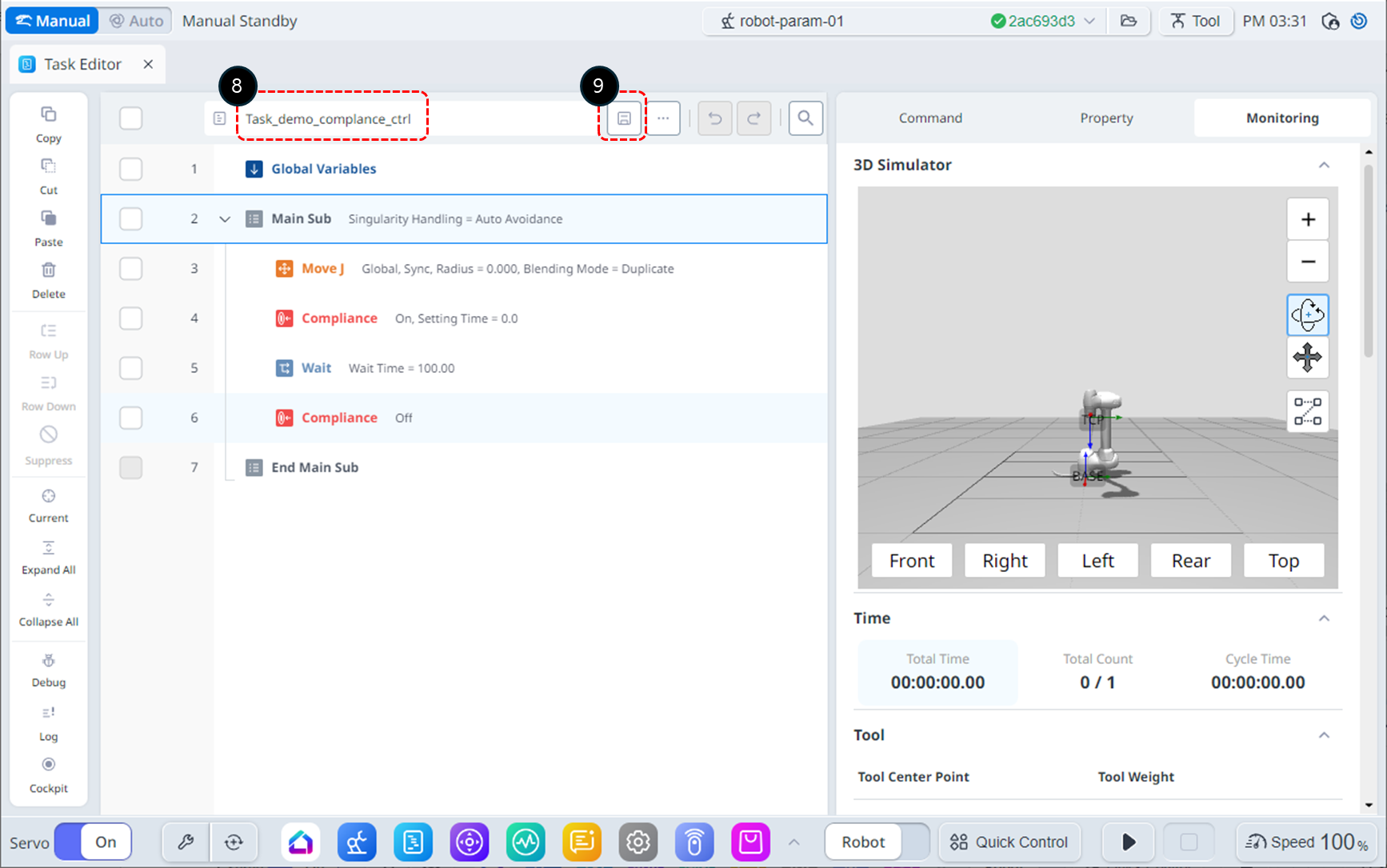
Sélectionnez le module Editeur de tâches dans le menu inférieur.
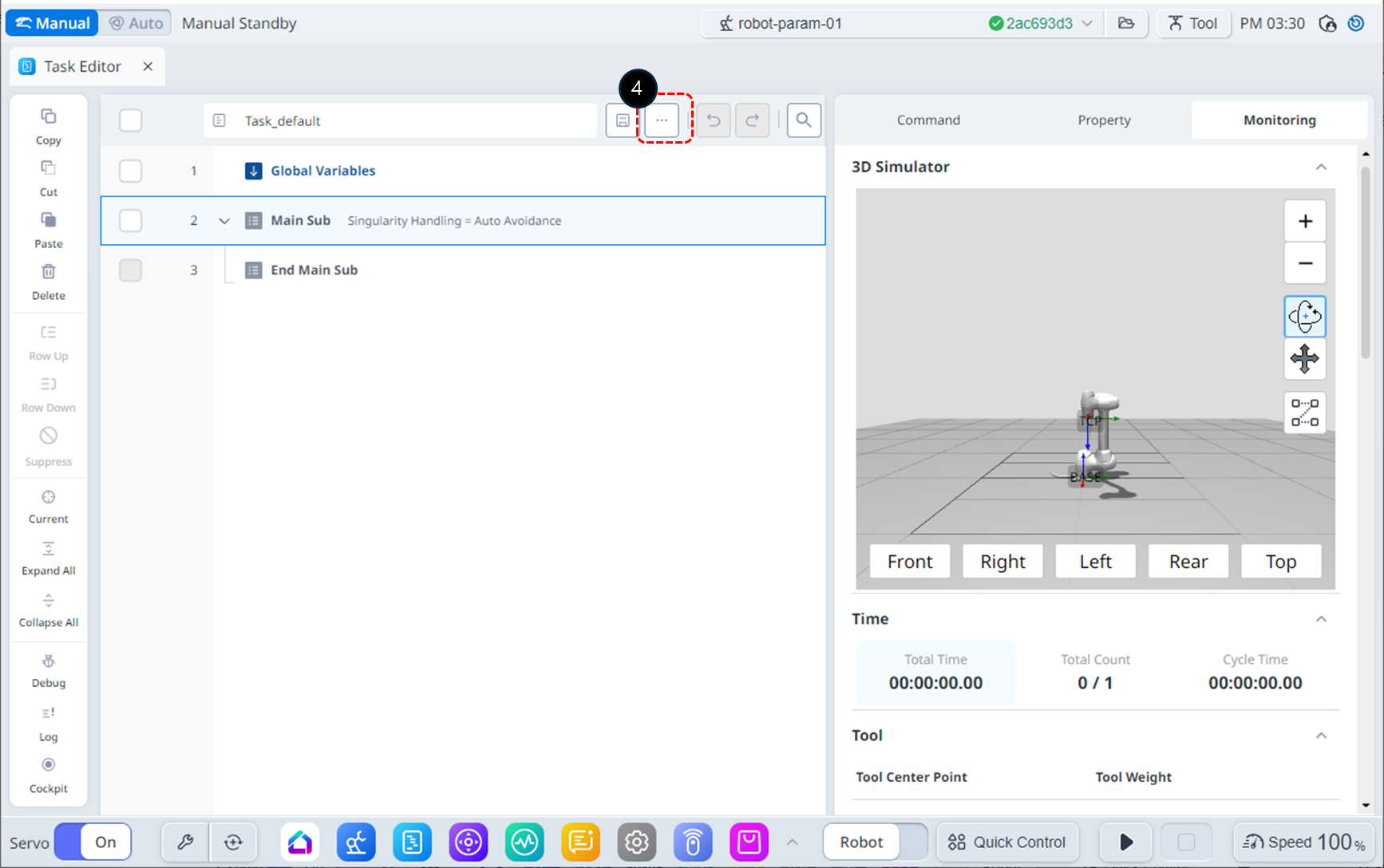
Cliquez sur le bouton fichier.
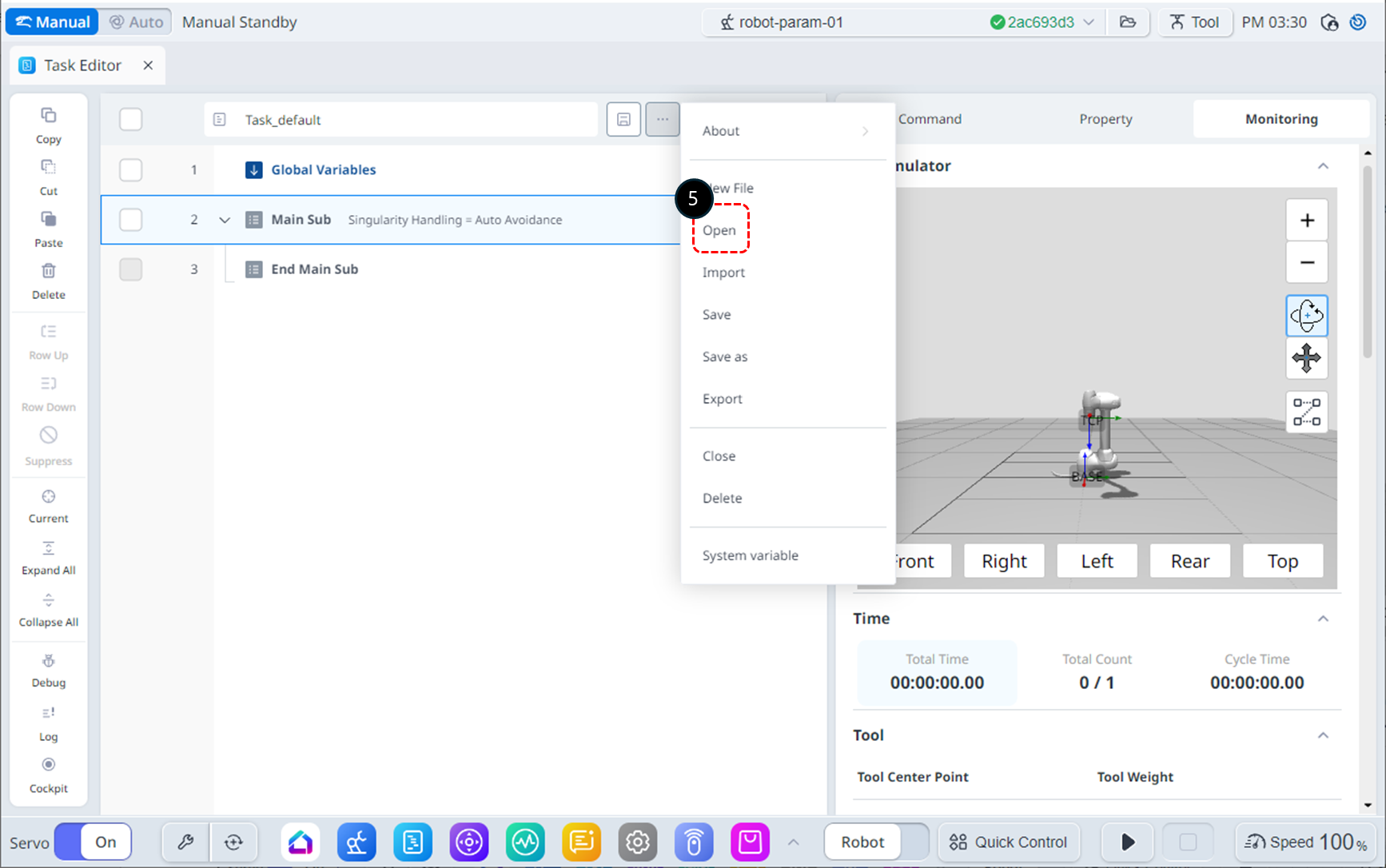
Cliquez sur le bouton ouvrir.
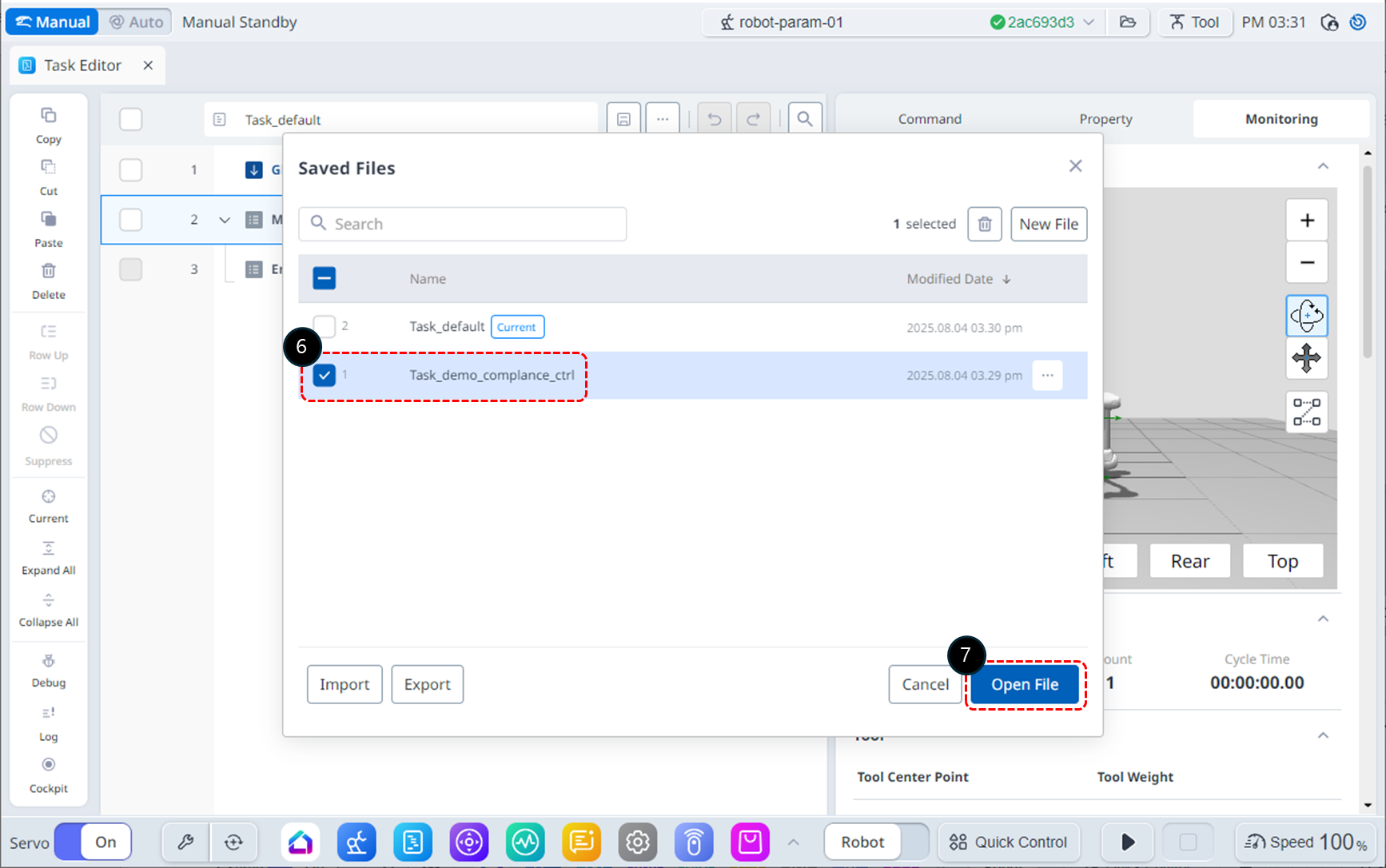
Sélectionnez le fichier Task_DEMO_Compliance_ctrl créé dans les Essayez les exemples de commandes de Compliance.
Cliquez sur le bouton ouvrir fichier.
Renommez le fichier task_demo_force_ctrl.
Cliquez sur le bouton Enregistrer pour enregistrer le nom du fichier.
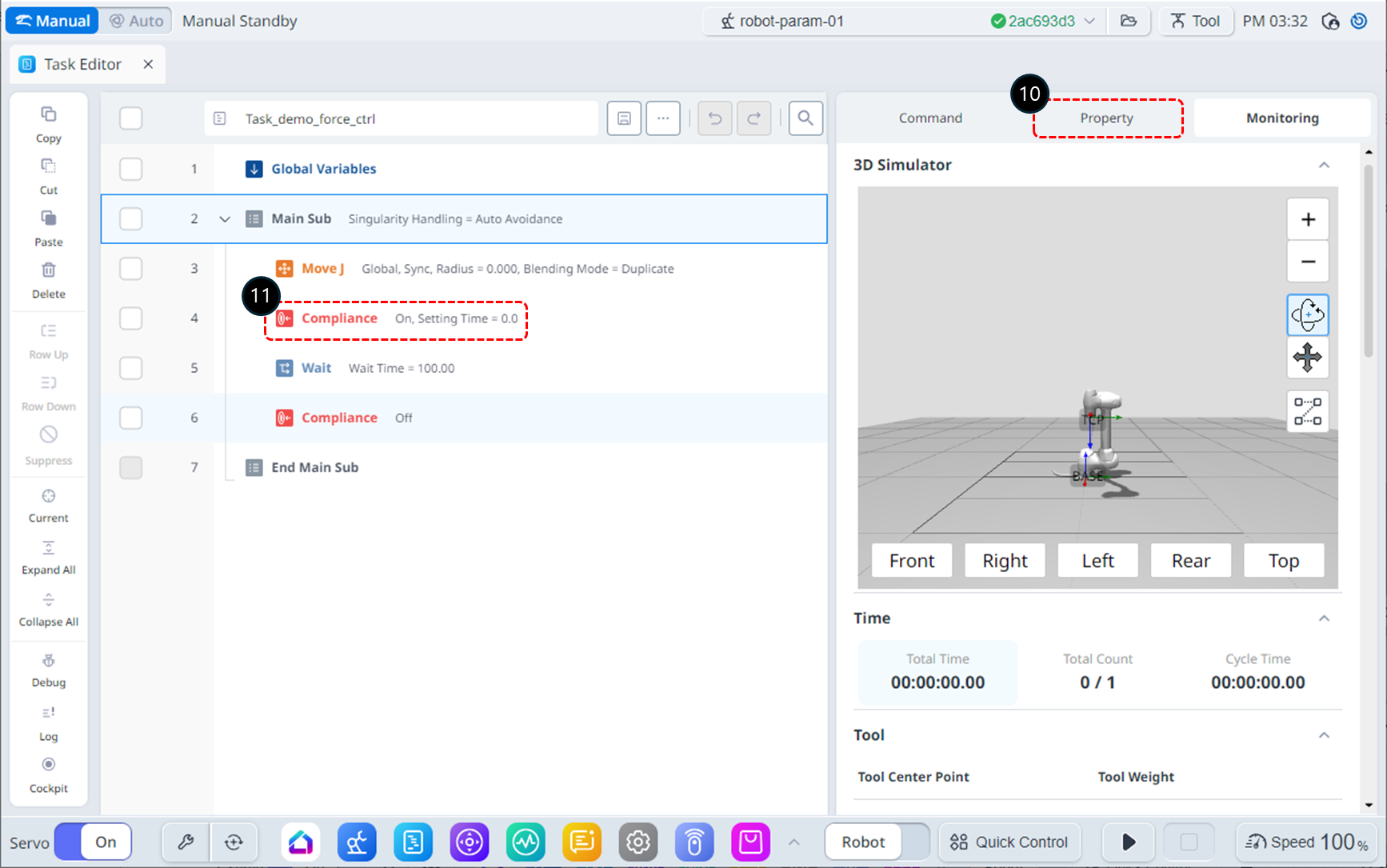
Sélectionnez l'onglet propriété.
Choisissez la commande Compliance sur la 4ème ligne.
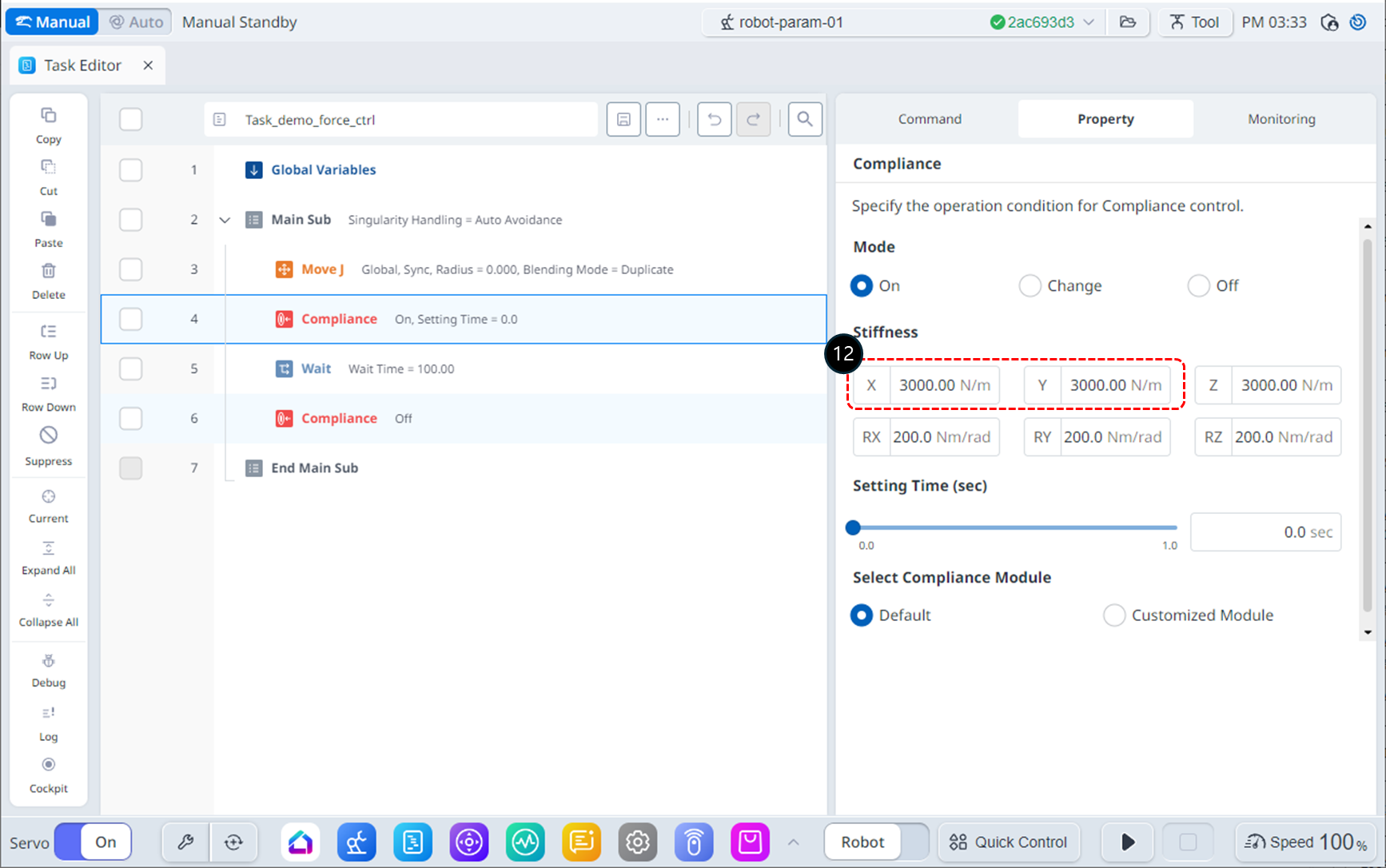
Définissez la raideur sur ses valeurs par défaut comme suit.
X, Y, Z : 3000 N/m (par défaut)
Rx, Ry, Rz : 200 Nm/rad (par défaut)
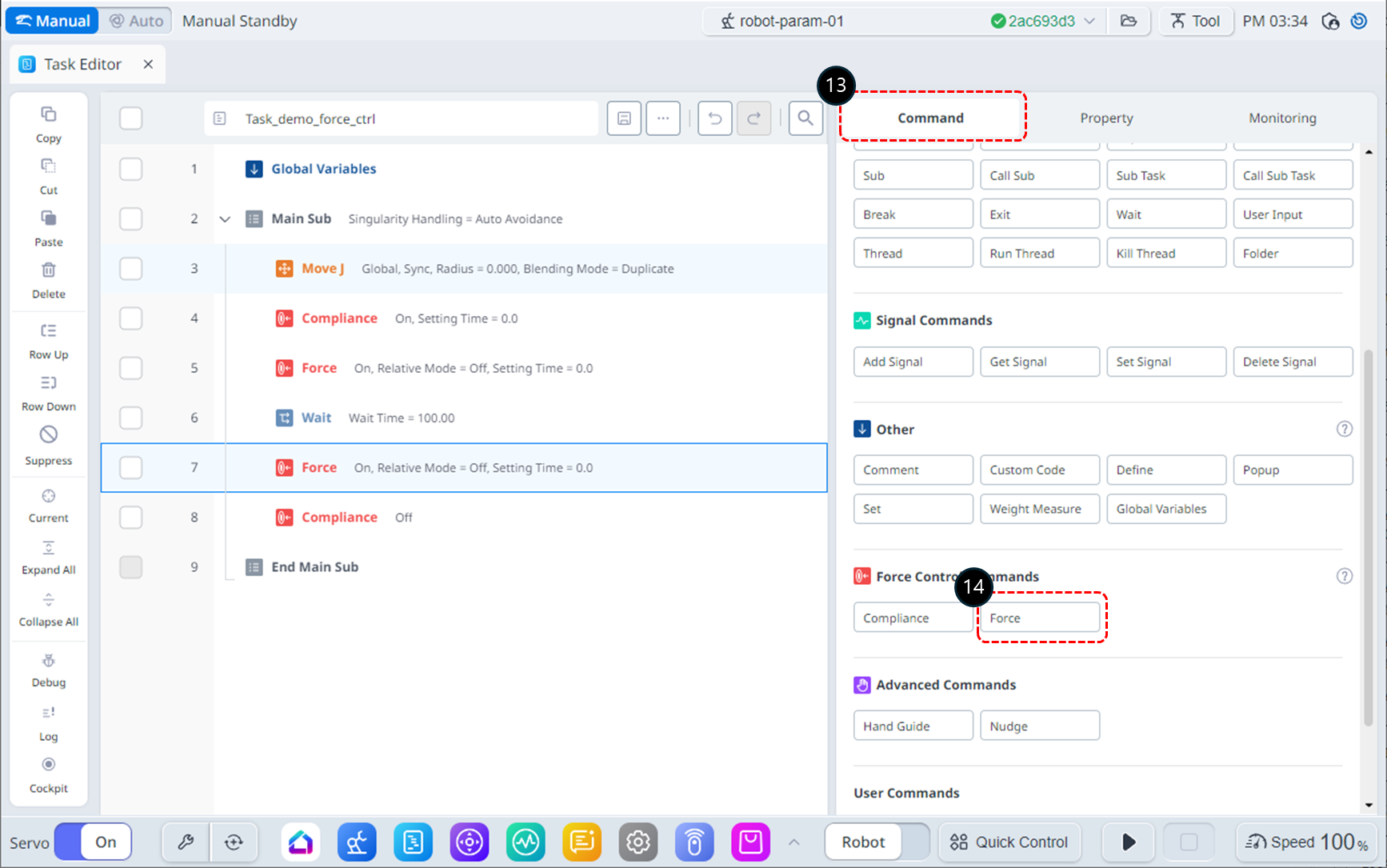
Sélectionnez l'onglet commande.
Ajoutez une commande Force aux 5ème et 7ème lignes. Ces commandes seront utilisées pour activer et désactiver le contrôle de force.
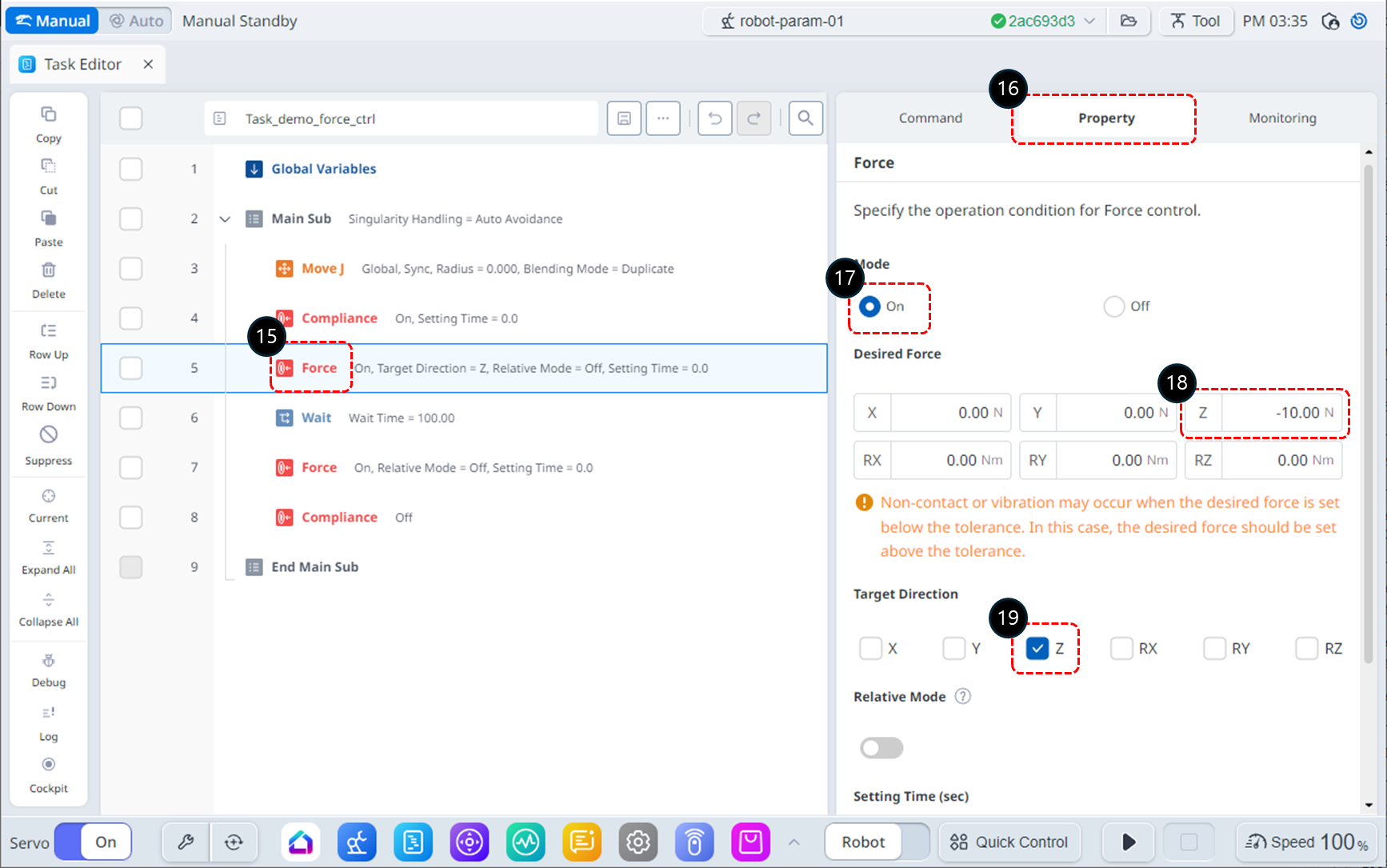
Sélectionnez la commande forcer sur la 5ème ligne.
Accédez à l'onglet propriété.
Définissez le mode comme suit : Le mode activé active le contrôle de force.
Mode : On
Définissez la force souhaitée comme suit.
X : 0 N (par défaut)
Y : 0 N (par défaut)
Z : -10 N
Rx, Ry, Rz : 0 Nm/rad (par défaut)
Dans la direction cible, vérifiez uniquement l'axe z.
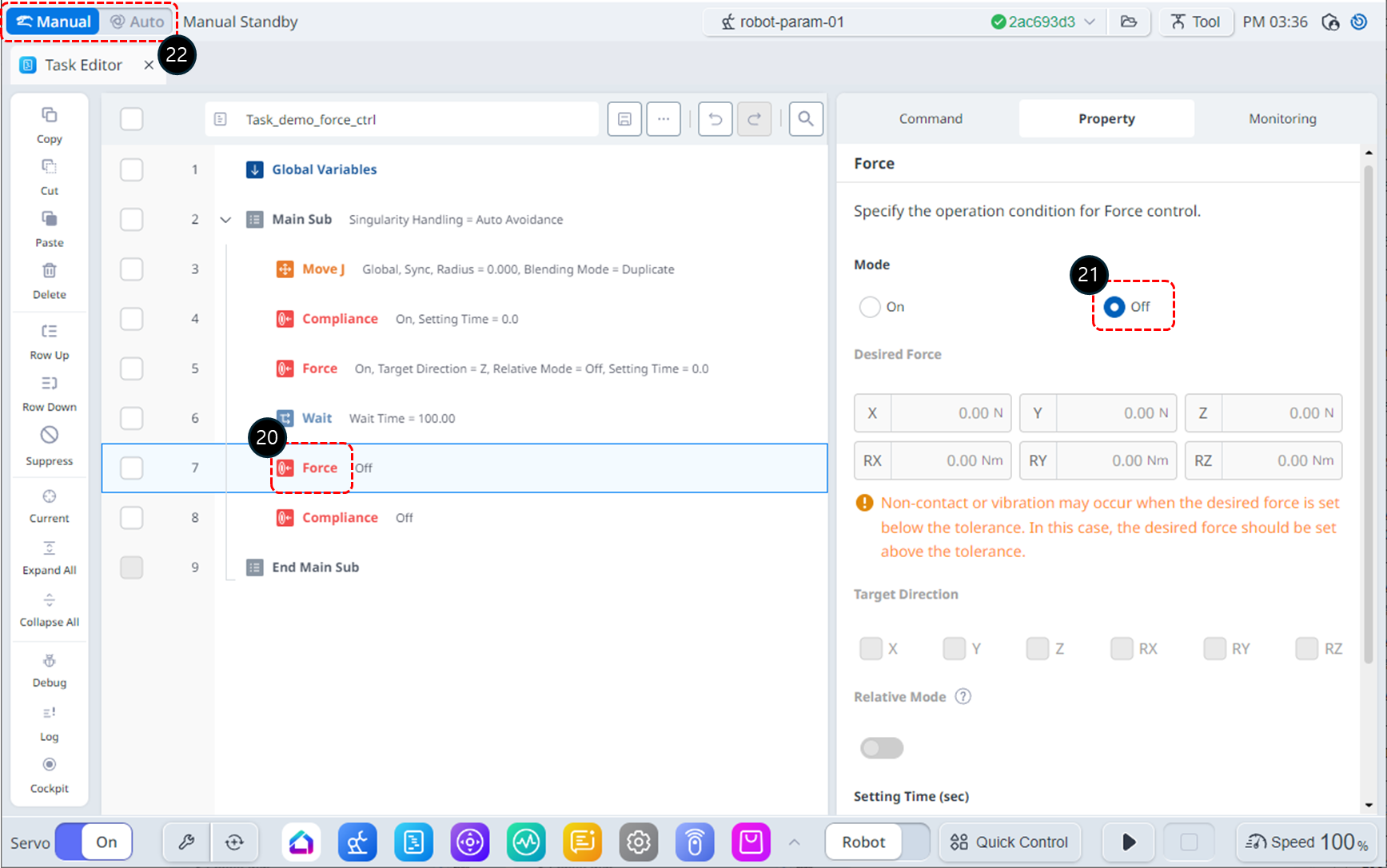
Dans la liste des tâches, sélectionnez la commande forcer à la ligne 7.
Définissez le mode comme suit : Le mode arrêt désactive le contrôle de force.
Mode : Off
Réglez le mode de fonctionnement sur Auto. L'onglet propriété passe automatiquement à l'onglet surveillance.
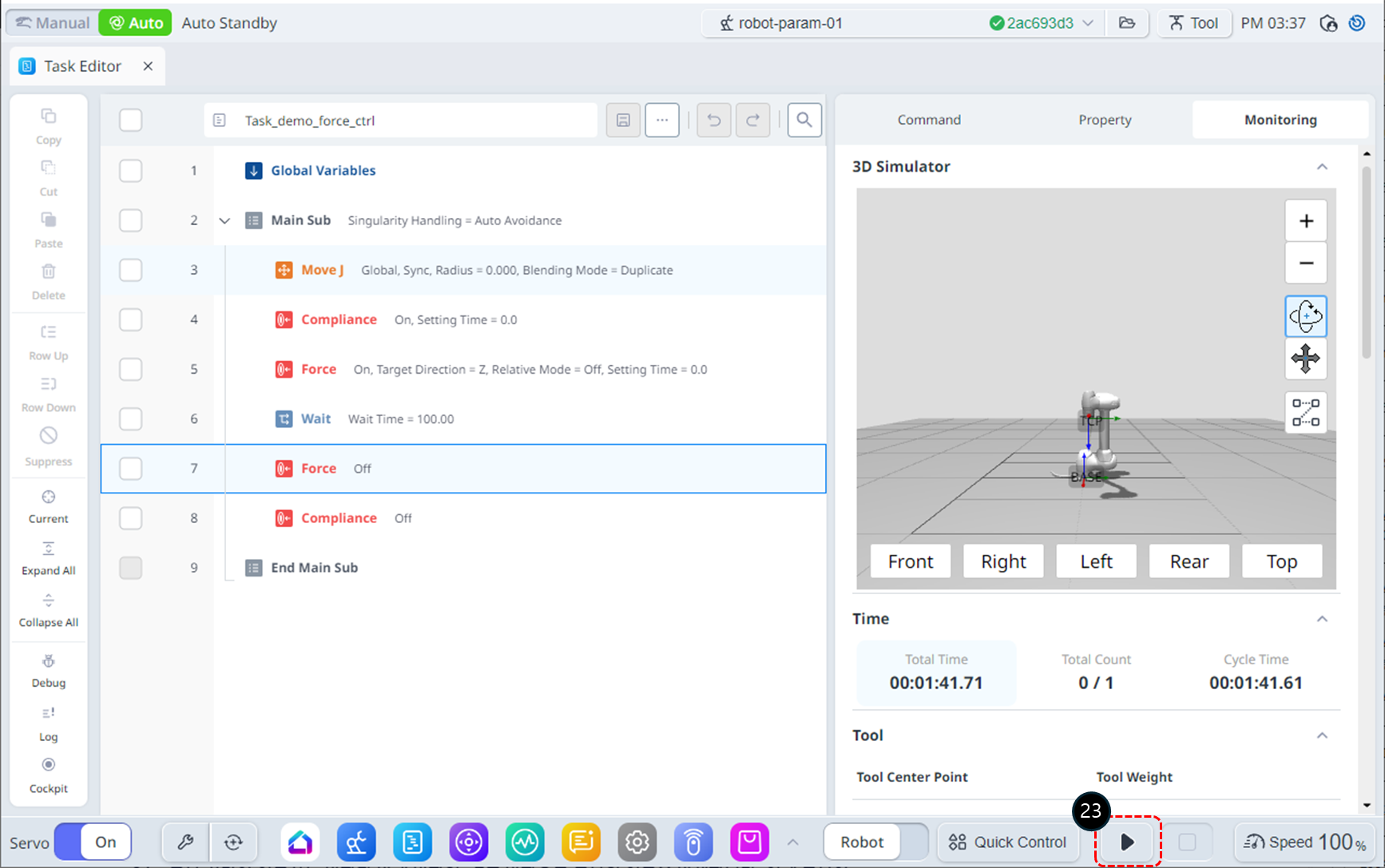
Cliquez sur le bouton exécuter. Dans l'état attente, le robot fonctionne comme suit :
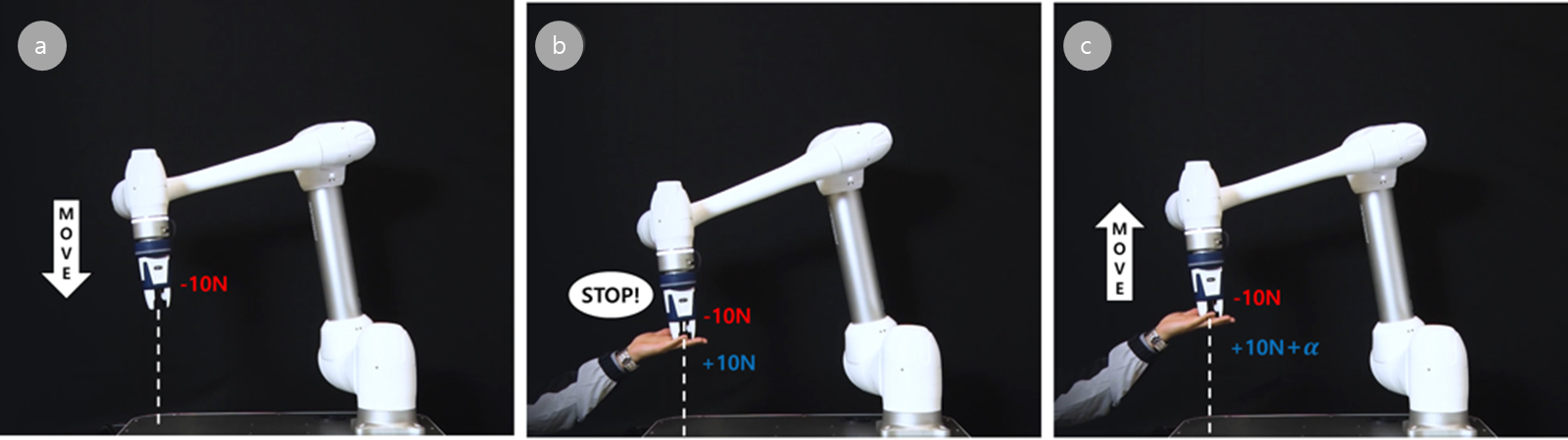
Une force de -10N est appliquée à l'effecteur terminal du robot, ce qui provoque un déplacement lent du robot dans la direction -Z.
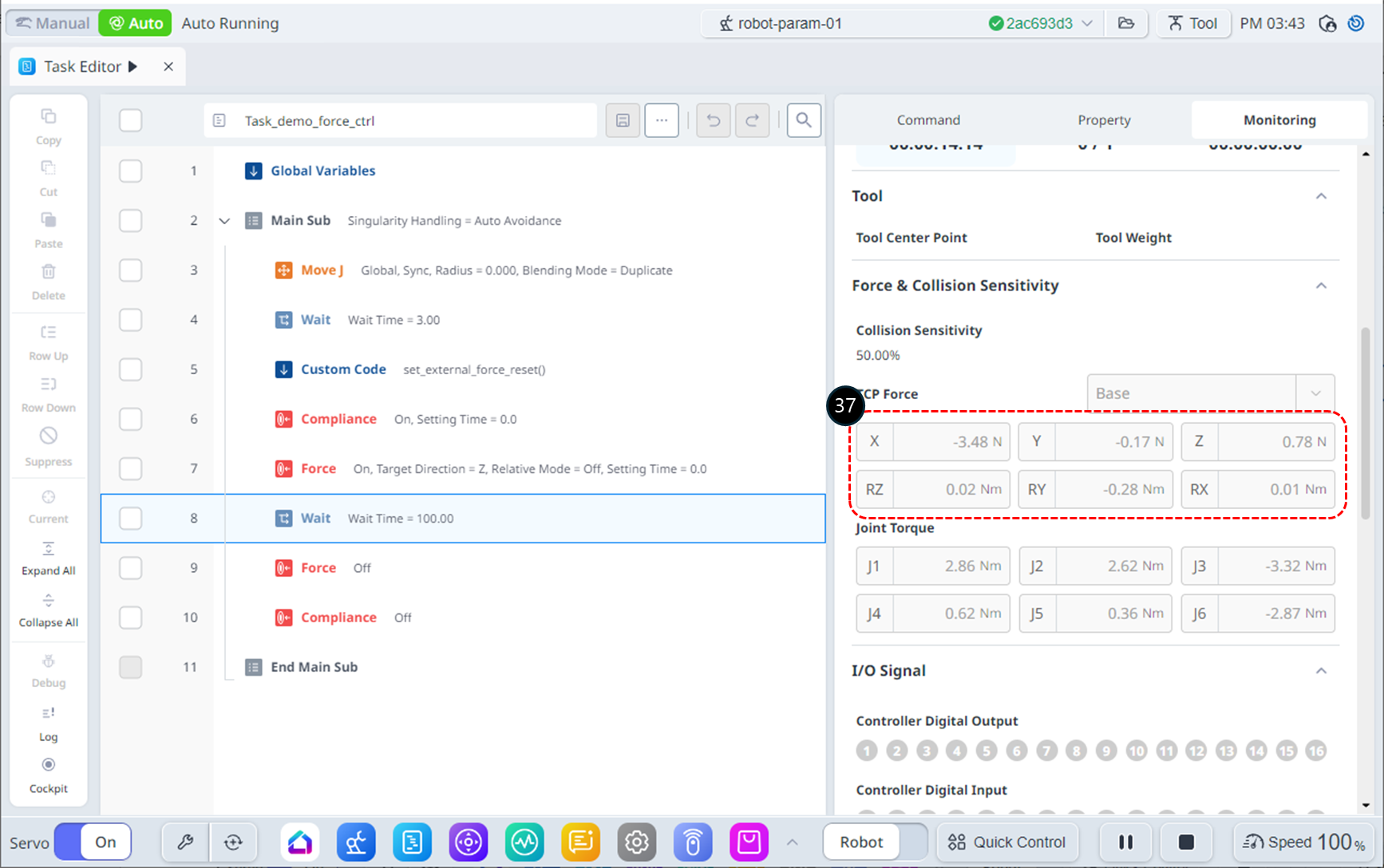
Appliquez une force antagoniste dans la direction +Z, opposée au mouvement du robot. Lorsque la force appliquée par le robot et la force opposée sont équilibrées, le robot semble maintenir sa position comme s'il était immobile.
Si une force supérieure à +10N est appliquée au robot, il se déplacera dans la direction de la force appliquée.
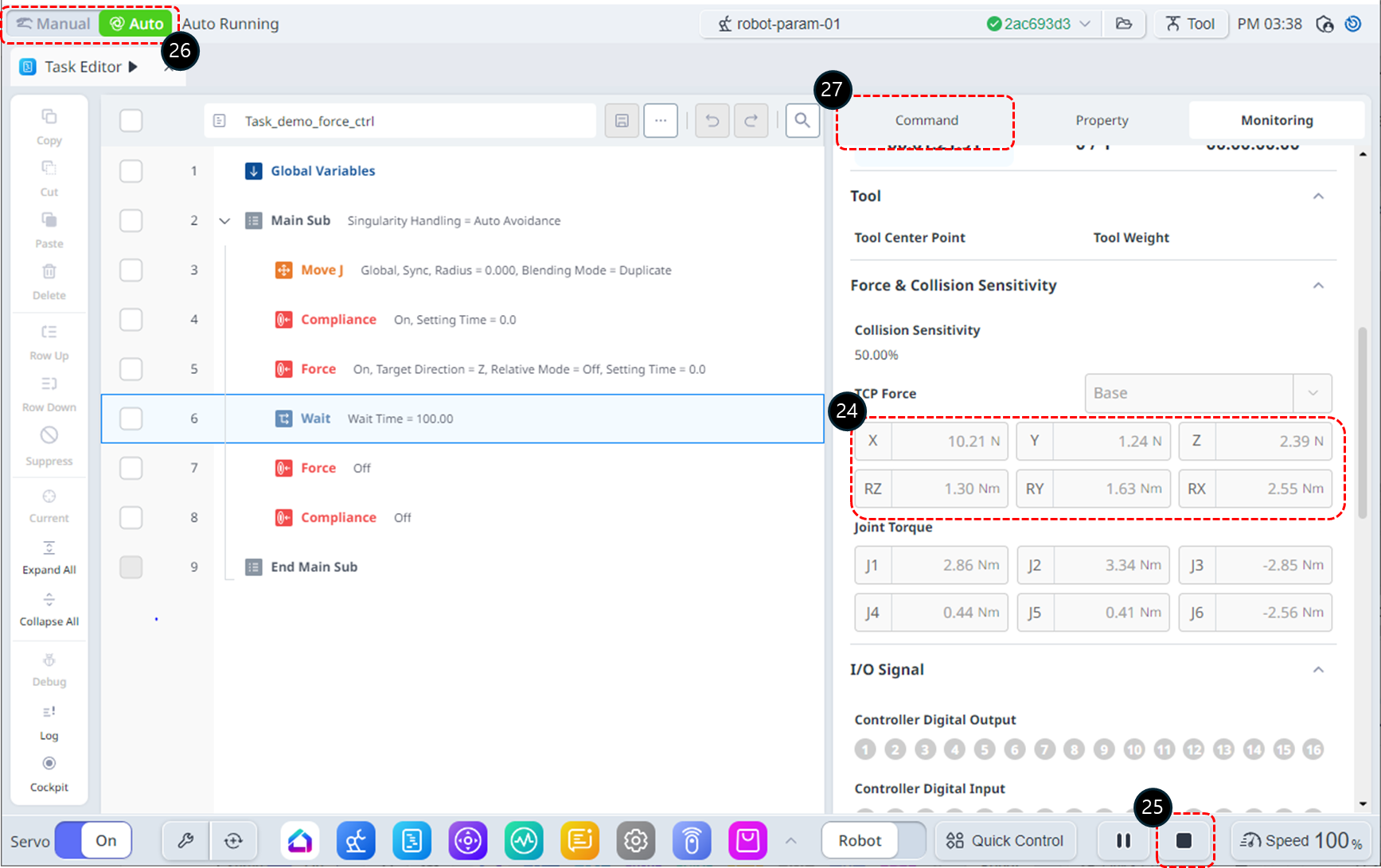
Pendant le fonctionnement, vous pouvez surveiller la force TCP en temps réel dans la section Force TCP de l'onglet surveillance. Si aucune force n'est appliquée à l'effecteur final du robot, les valeurs de force TCP doivent toutes être 0, mais vous pouvez remarquer que des composants d'erreur s'affichent. Vous trouverez ci-dessous une explication supplémentaire pour résoudre ce problème.
Cliquez sur le bouton arrêter pour mettre fin à la tâche.
Basculer le mode de fonctionnement sur Manuel pour la modification des tâches.
Sélectionnez l'onglet commande.
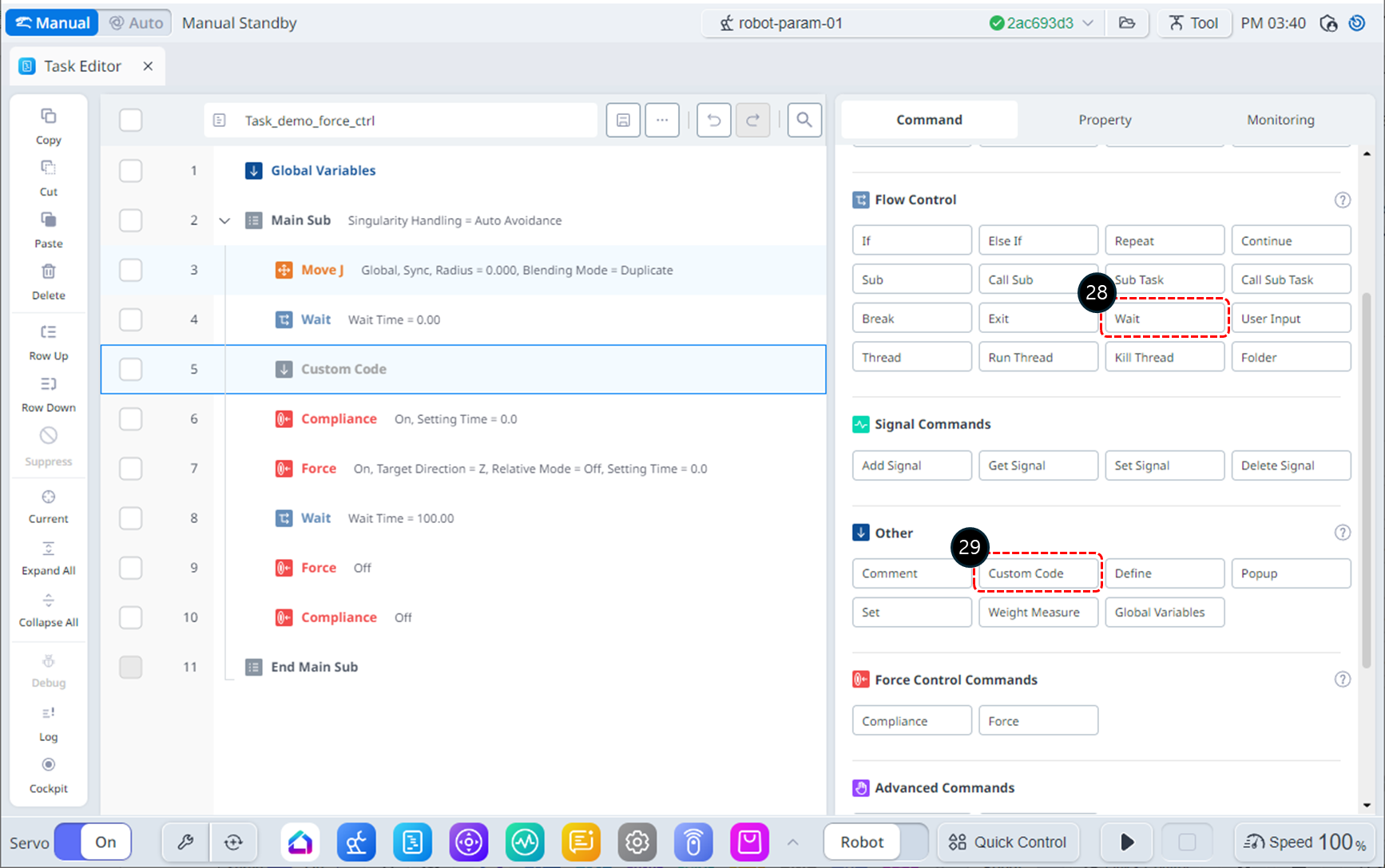
Ajoutez une commande attendre à la ligne 4 de la liste des tâches.
Ajoutez une commande Code personnalisé à la ligne 5 de la liste des tâches.
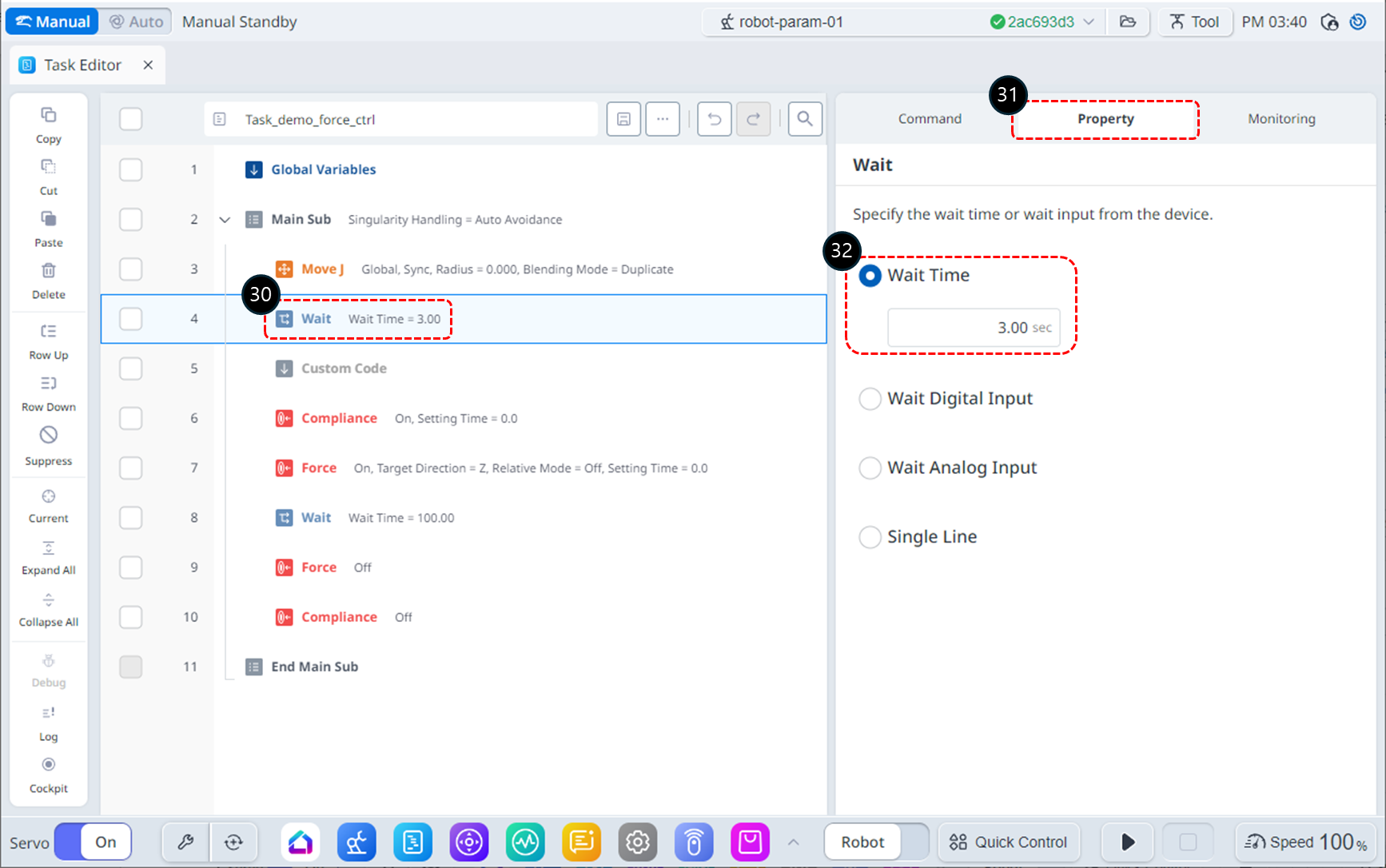
Sélectionnez la commande attendre à la ligne 4.
Sélectionnez l'onglet propriété.
Réglez le temps d'attente comme suit.
Temps d'attente : 3 s
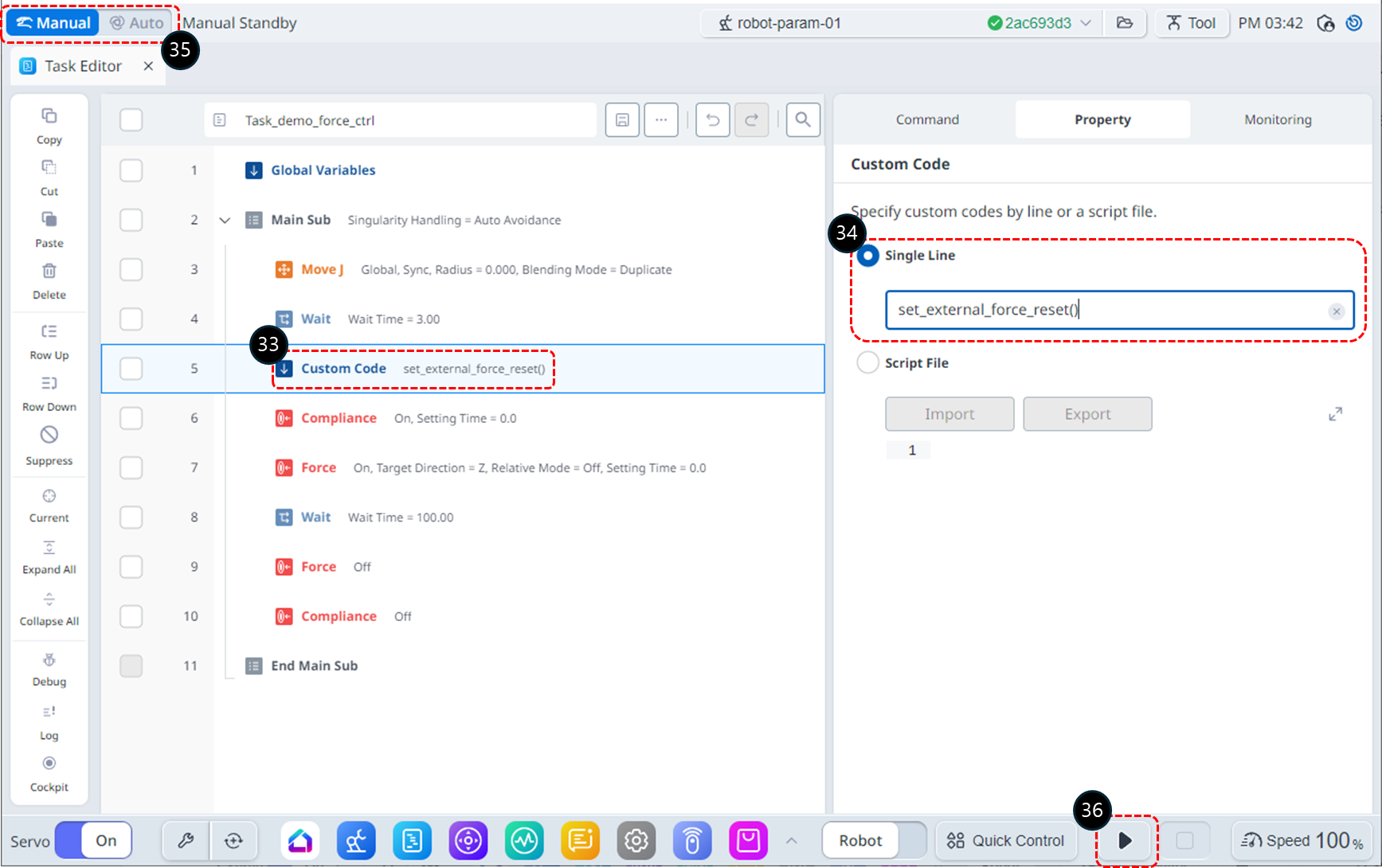
Sélectionnez la commande Code personnalisé à la ligne 5.
Choisissez ligne unique et ajoutez la commande DRL suivante : Cette commande réinitialise les valeurs du capteur de force externe pour supprimer les erreurs.
set_externl_force_reset()
Réglez le mode de fonctionnement sur Auto. L'onglet propriété passe automatiquement à l'onglet surveillance.
Cliquez sur le bouton exécuter.
Dans l'onglet surveillance, vérifiez les valeurs TCP Force. Vous remarquerez que l'erreur a été réduite par rapport à avant d'utiliser la commande set_external_force_reset().