
Essayez les exemples de commandes de Compliance
Attention
Avant d'essayer l'échantillon, assurez-vous de lire et de suivre Précautions. Pour plus d'informations, référez-vous à PARTIE 1. Manuel de sécurité.
Remarque
S'il y a un couple externe supérieur au seuil lors de l'activation ou de la désactivation du contrôle de conformité, le robot arrête le programme en raison de l'erreur JTS (joint Torque Sensor).
Le changement de rigidité peut être exécuté quelle que soit la taille du couple externe.
Pendant le contrôle de conformité, les mouvements de liaison, tels que la commande MoveJ, ne peuvent pas être exécutés.
Seuil d'erreur JTS (nm) | ||||||
Modèle | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
E0509 | 15 | 15 | 15 | 15 | 15 | 15 |
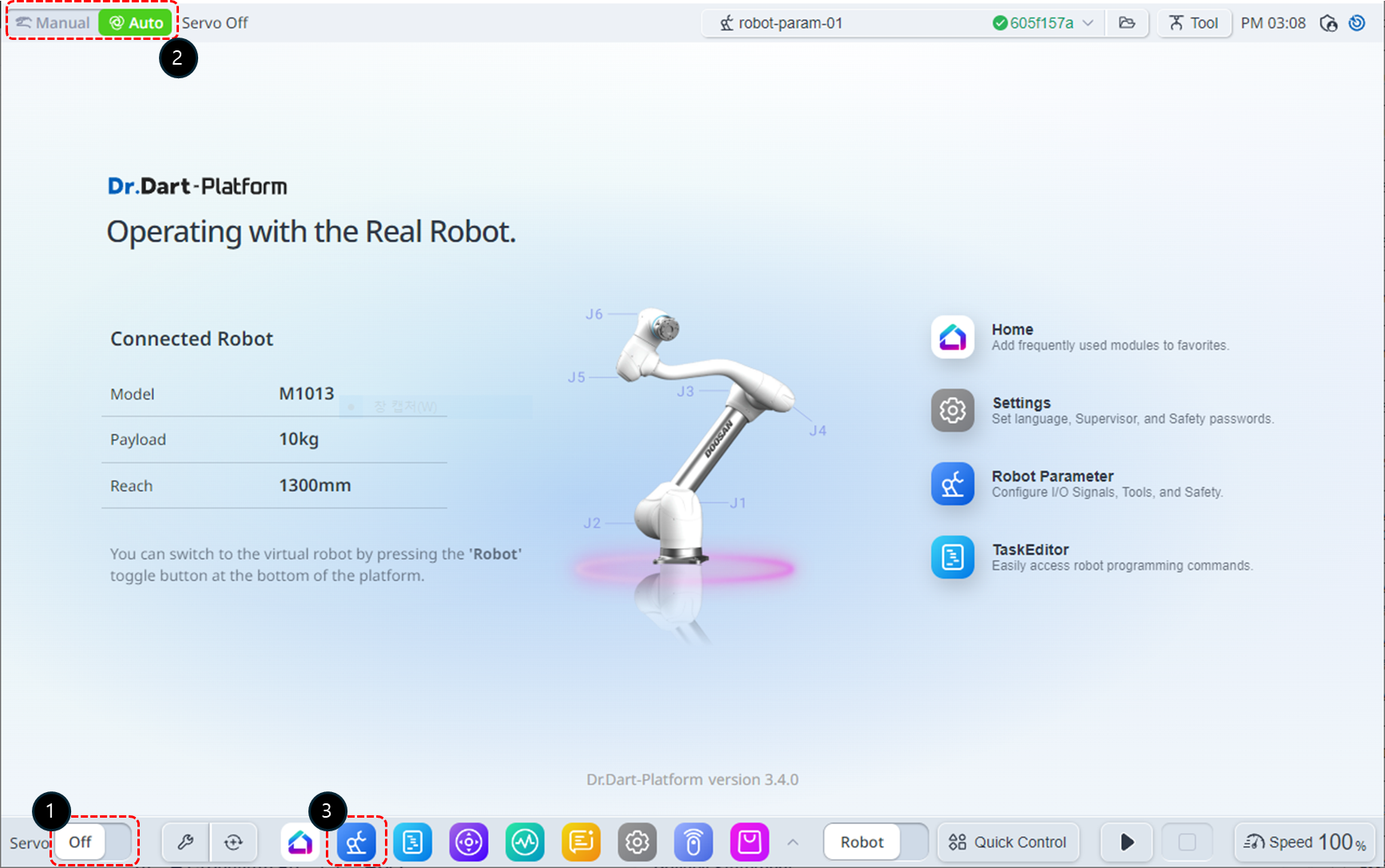
Réglez l'état servo sur on.
Réglez le mode de fonctionnement sur Manuel.
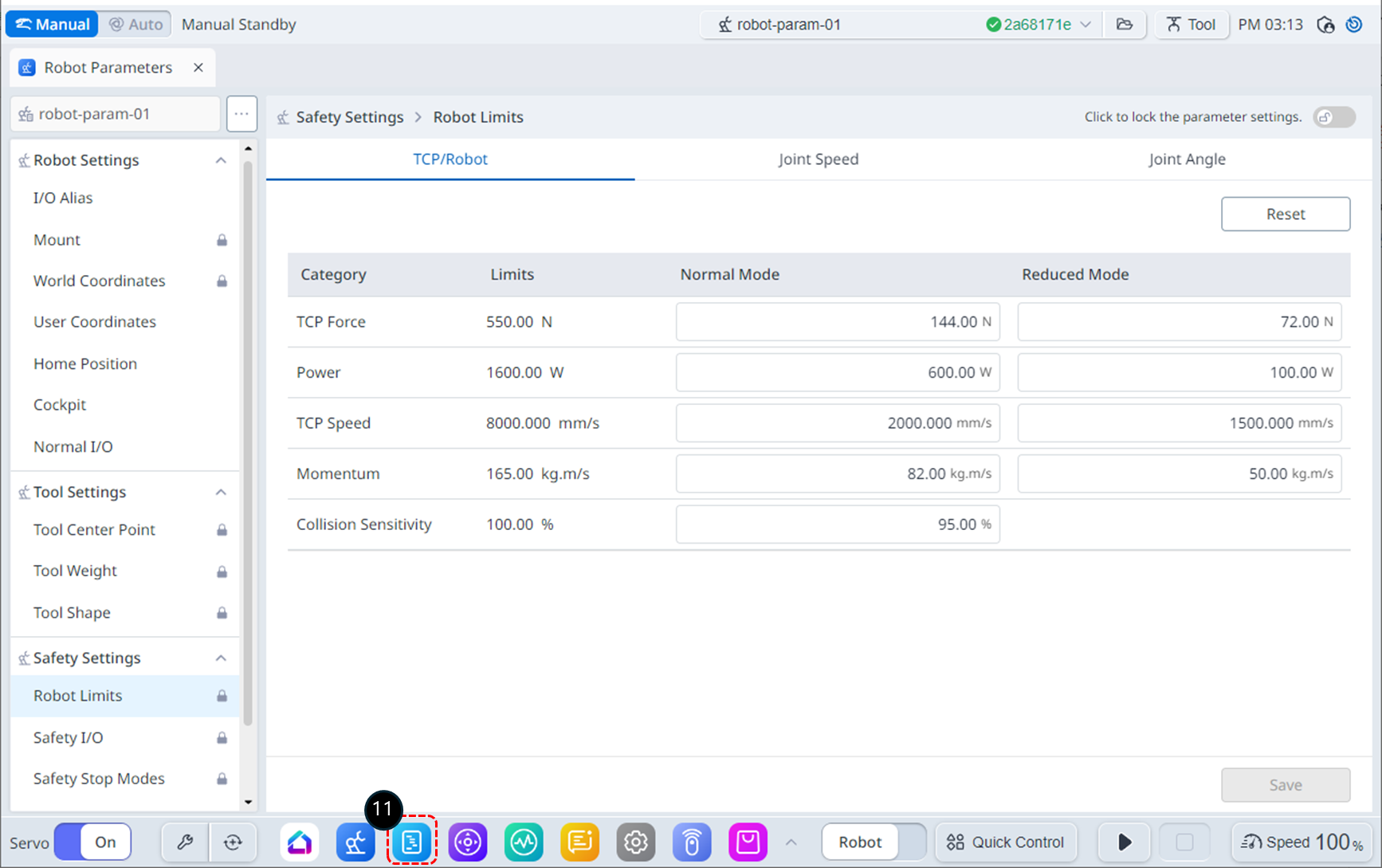
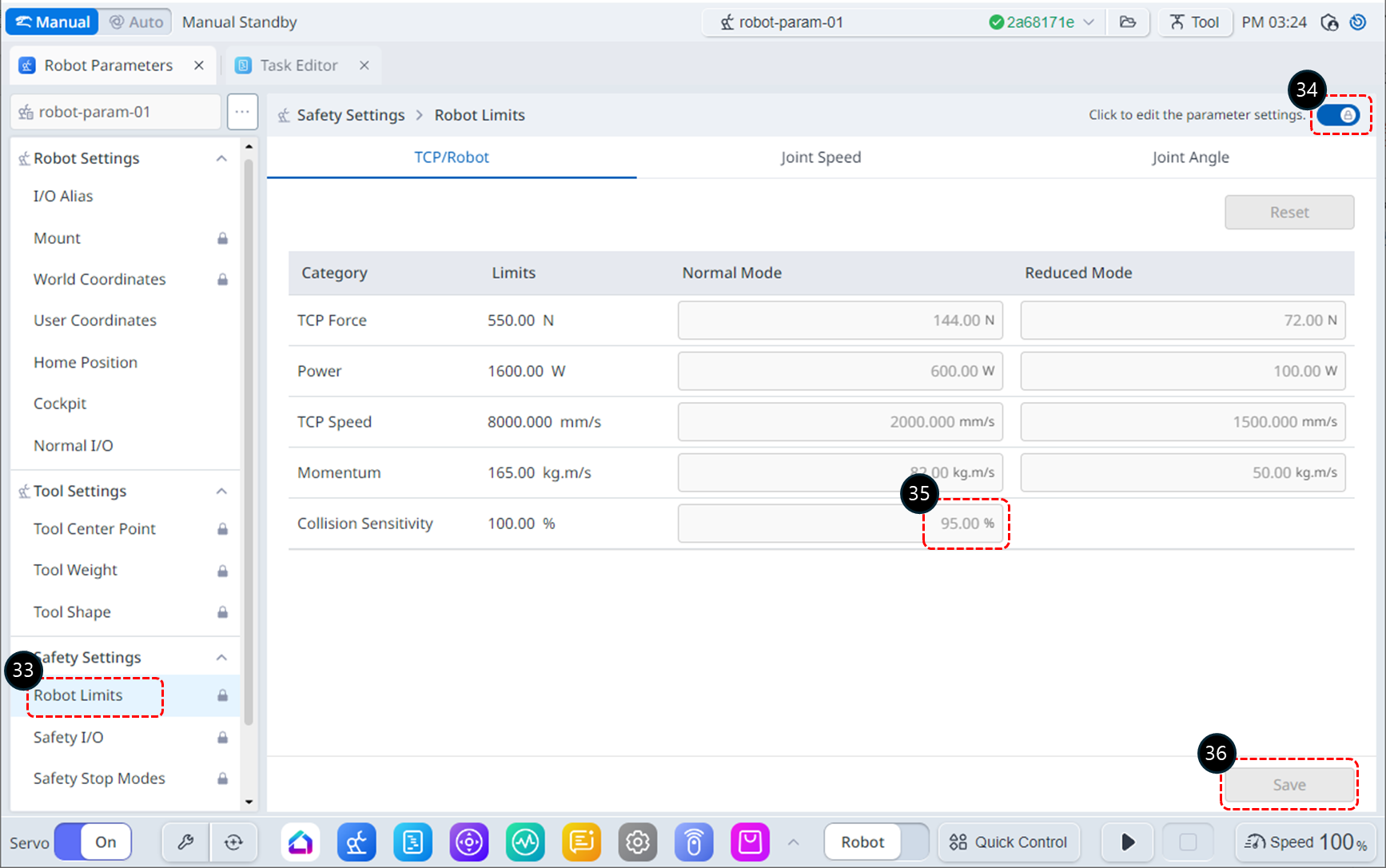
Sélectionner le module robot Parameters dans le menu inférieur. Dans cet exemple, la sensibilité aux collisions est définie sur 95 % pour expliquer la raison de l'abaissement de la sensibilité aux collisions lors de l'utilisation du contrôle de conformité.
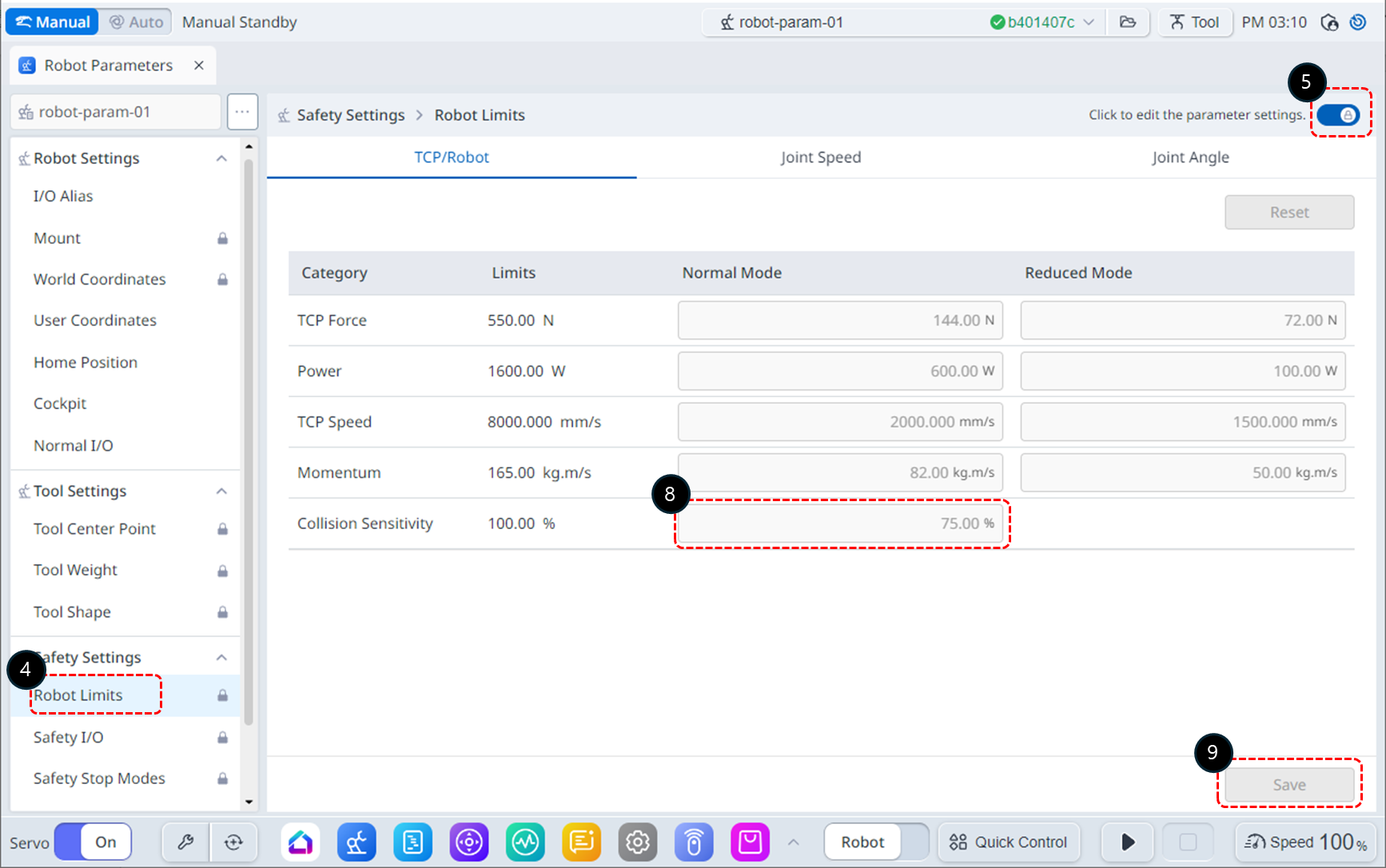
Sélectionnez limites du robot dans Paramètres de sécurité.
Activer l'état d'édition des paramètres.
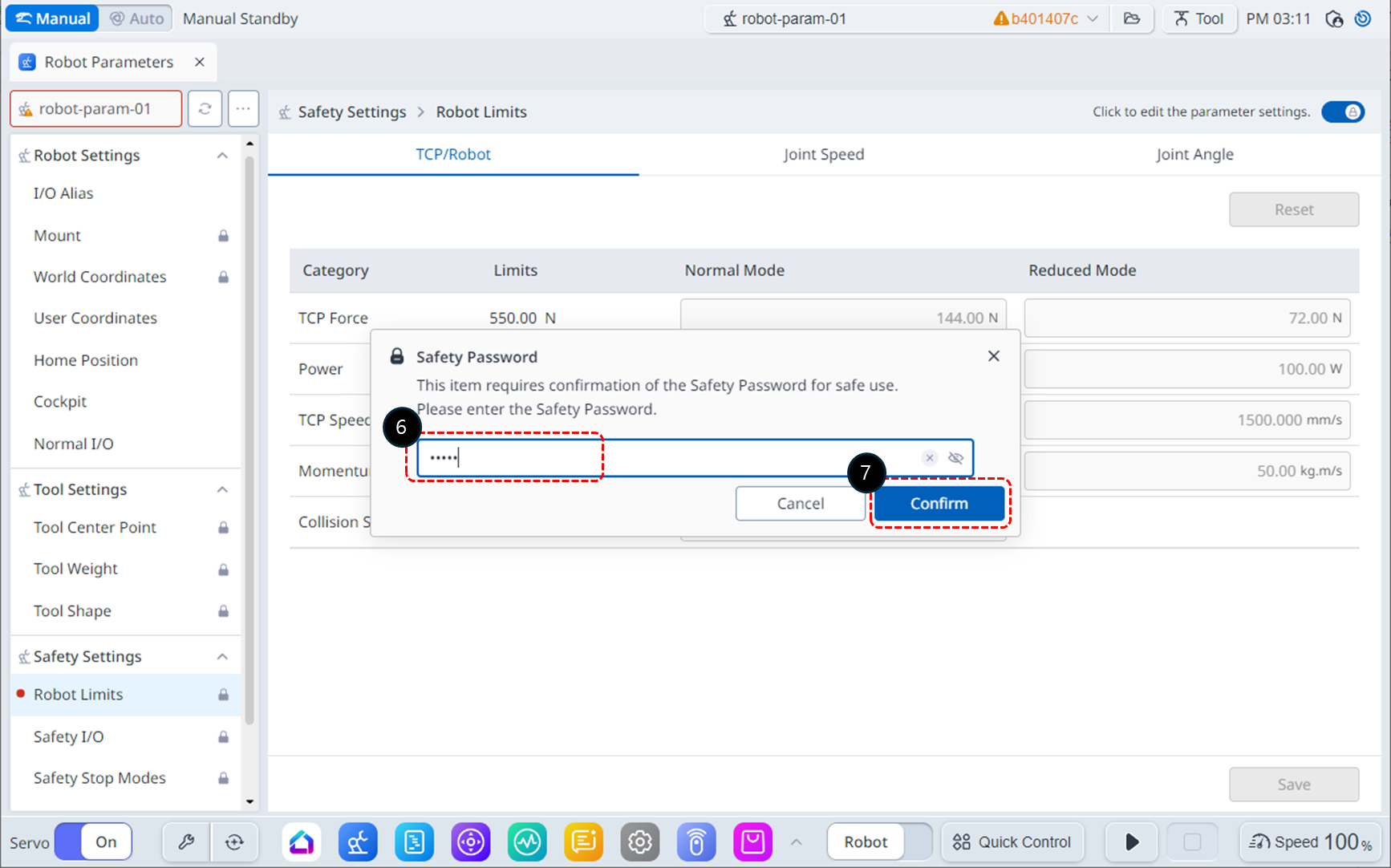
Si une fenêtre de saisie de mot de passe apparaît, entrez le mot de passe de sécurité (mot de passe de sécurité par défaut : admin).
Cliquez sur le bouton confirmer.
Réglez la sensibilité de collision sur 95 %.
Cliquez sur le bouton Enregistrer pour enregistrer les paramètres.
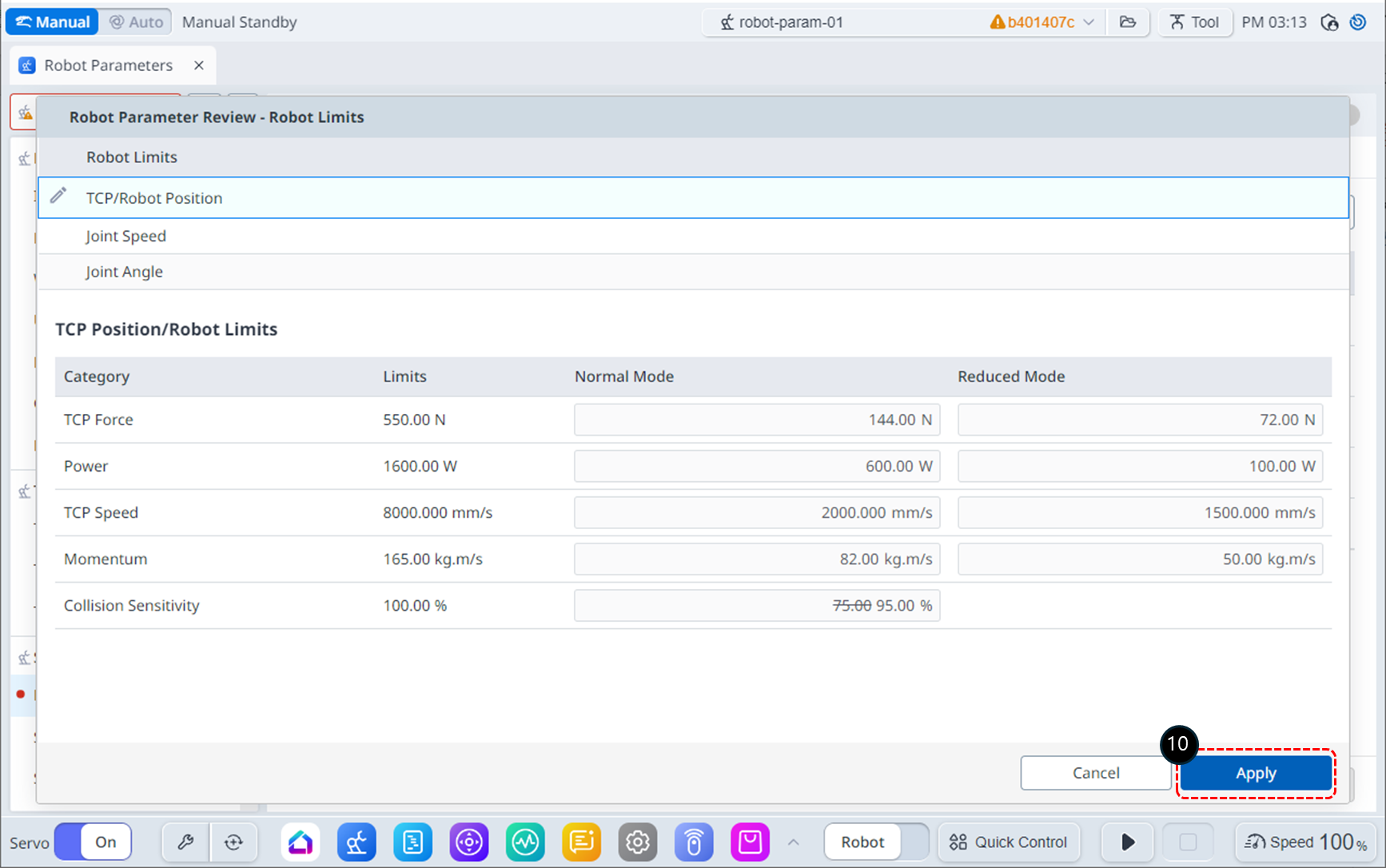
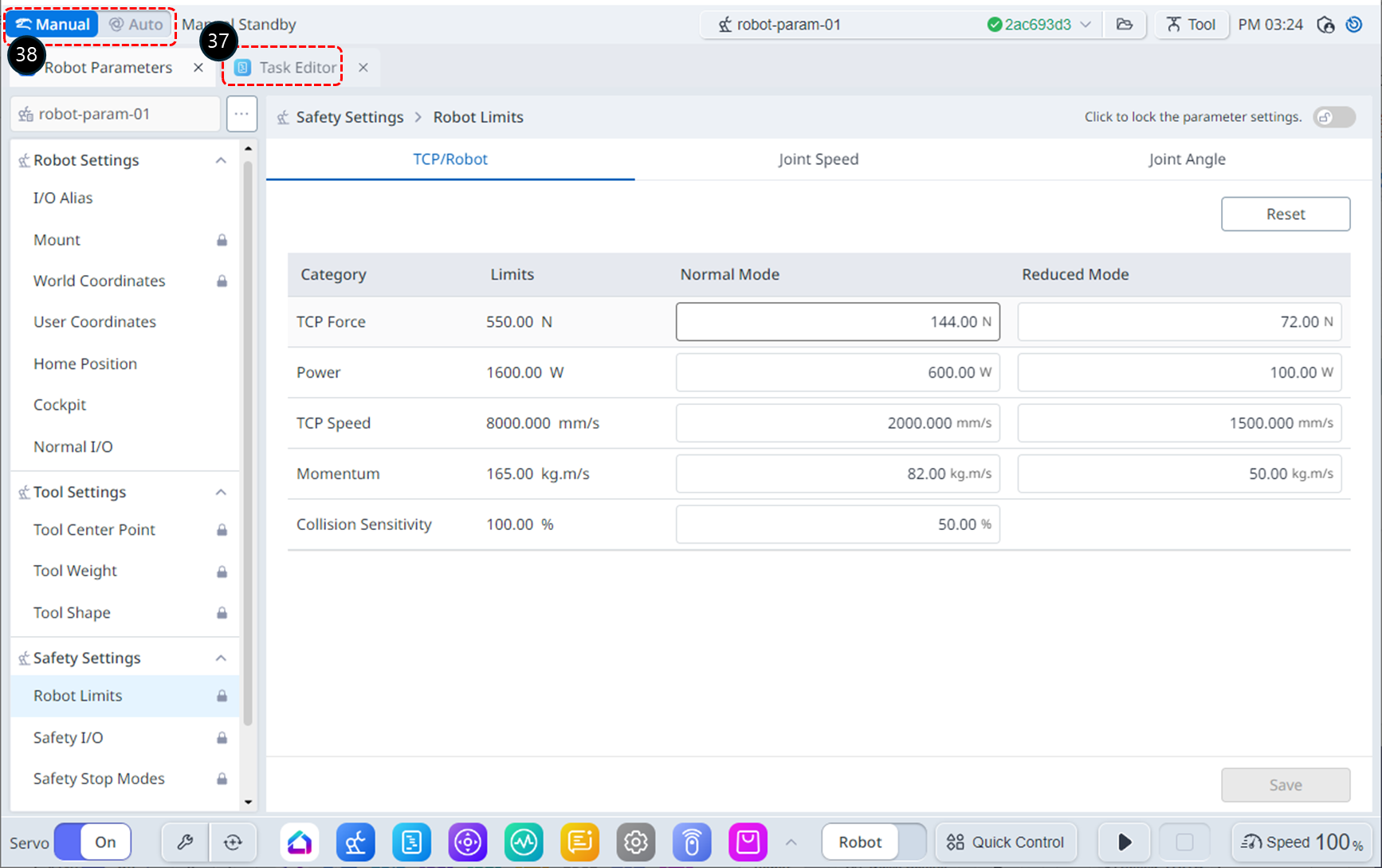
Après avoir vérifié les modifications, cliquez sur le bouton appliquer.
Sélectionnez le module Editeur de tâches dans le menu inférieur.
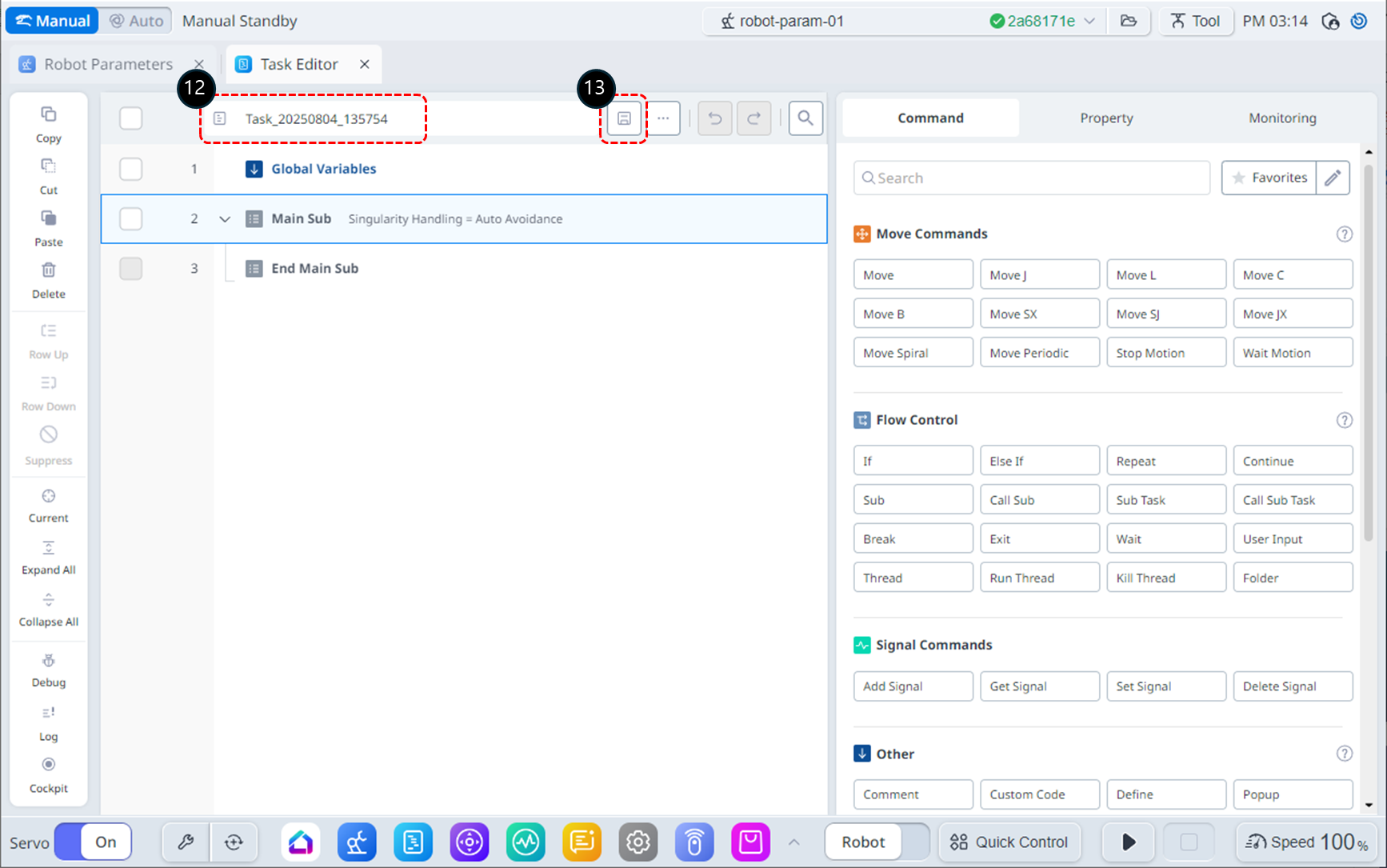
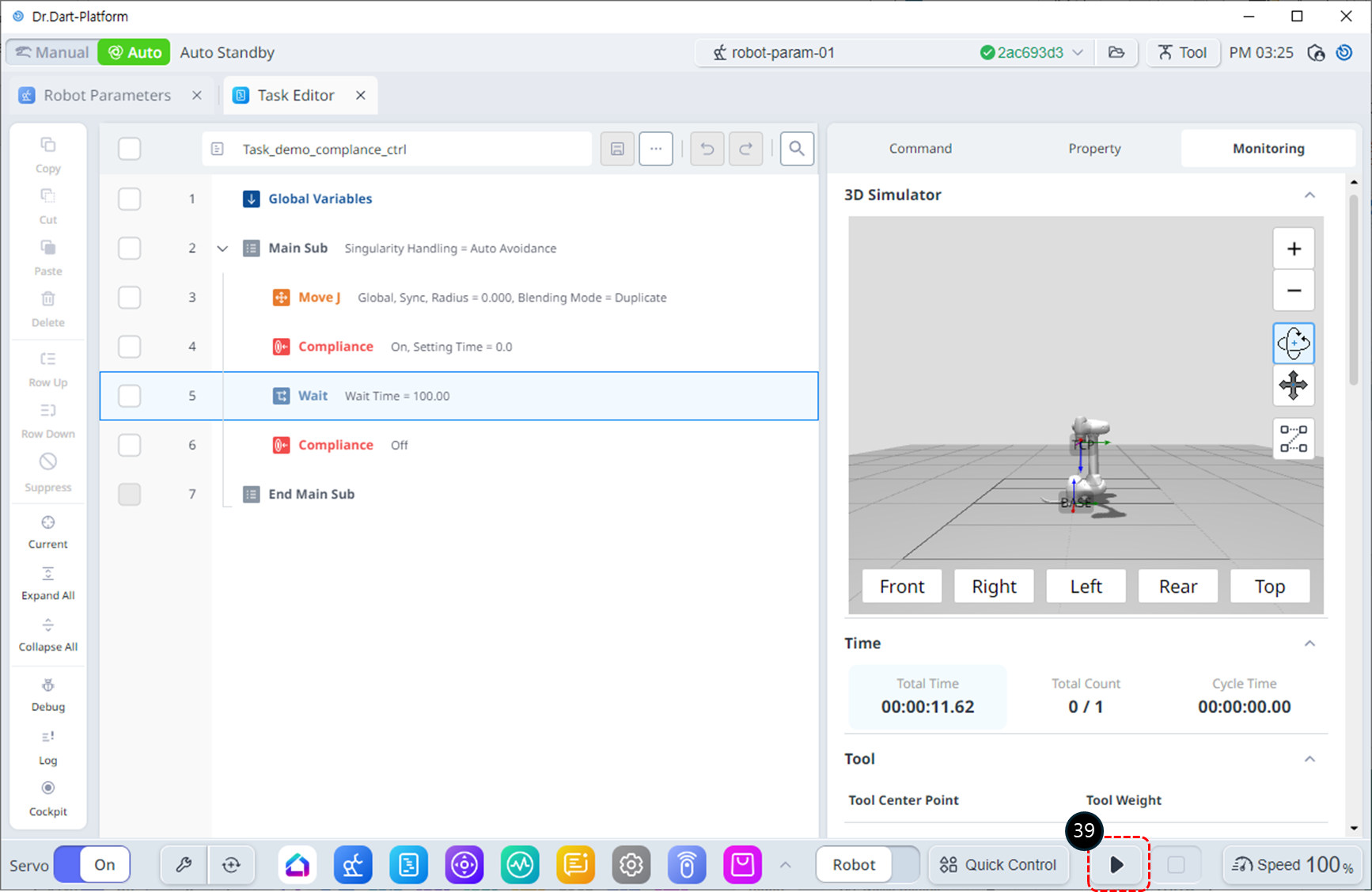
Renommez la tâche task_demo_compliance_ctrl.
Enregistrez le nom de tâche mis à jour.
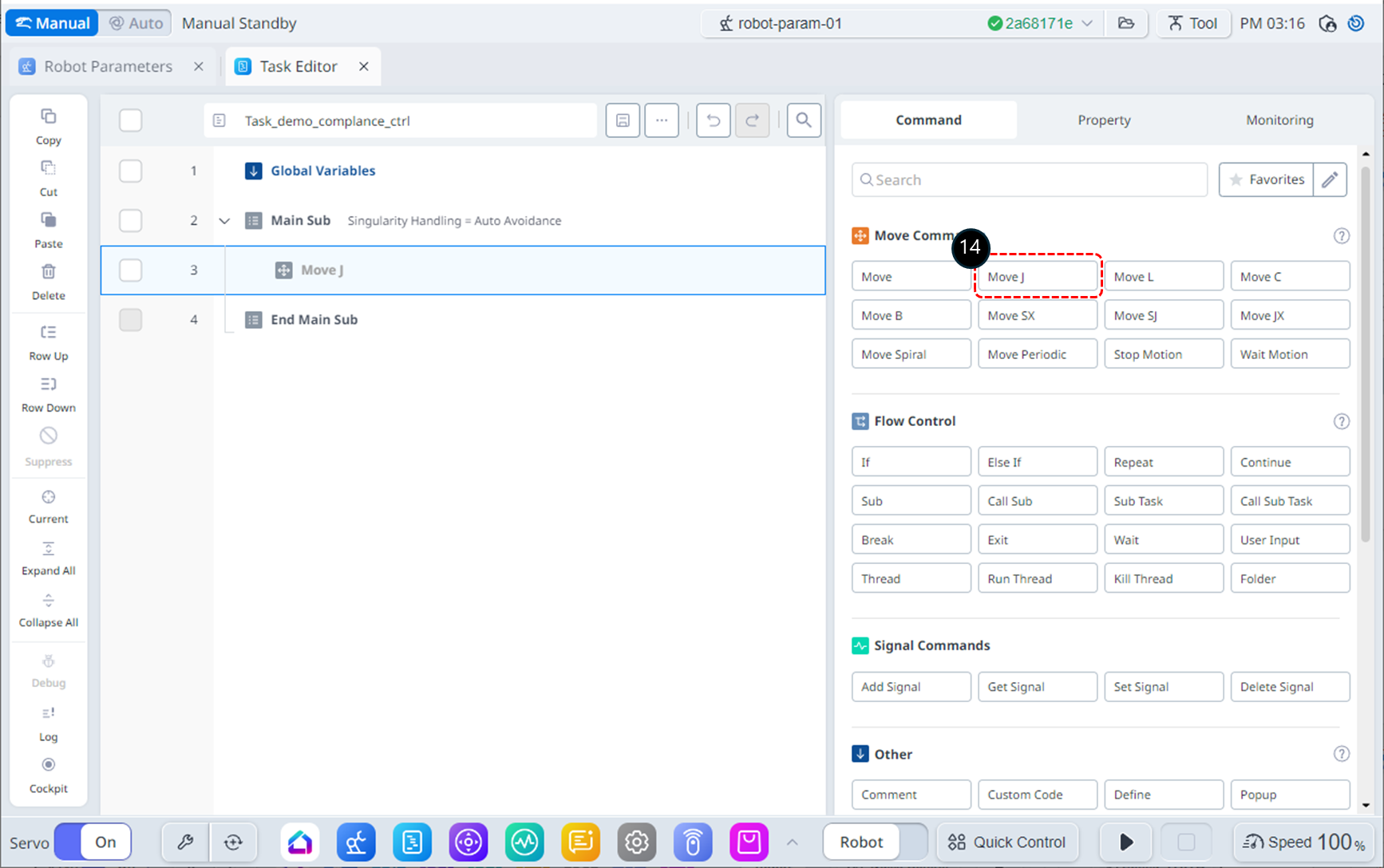
Ajoutez la commande MoveJ. Cette commande sera utilisée pour déplacer le robot vers la position de départ pour le contrôle de conformité.
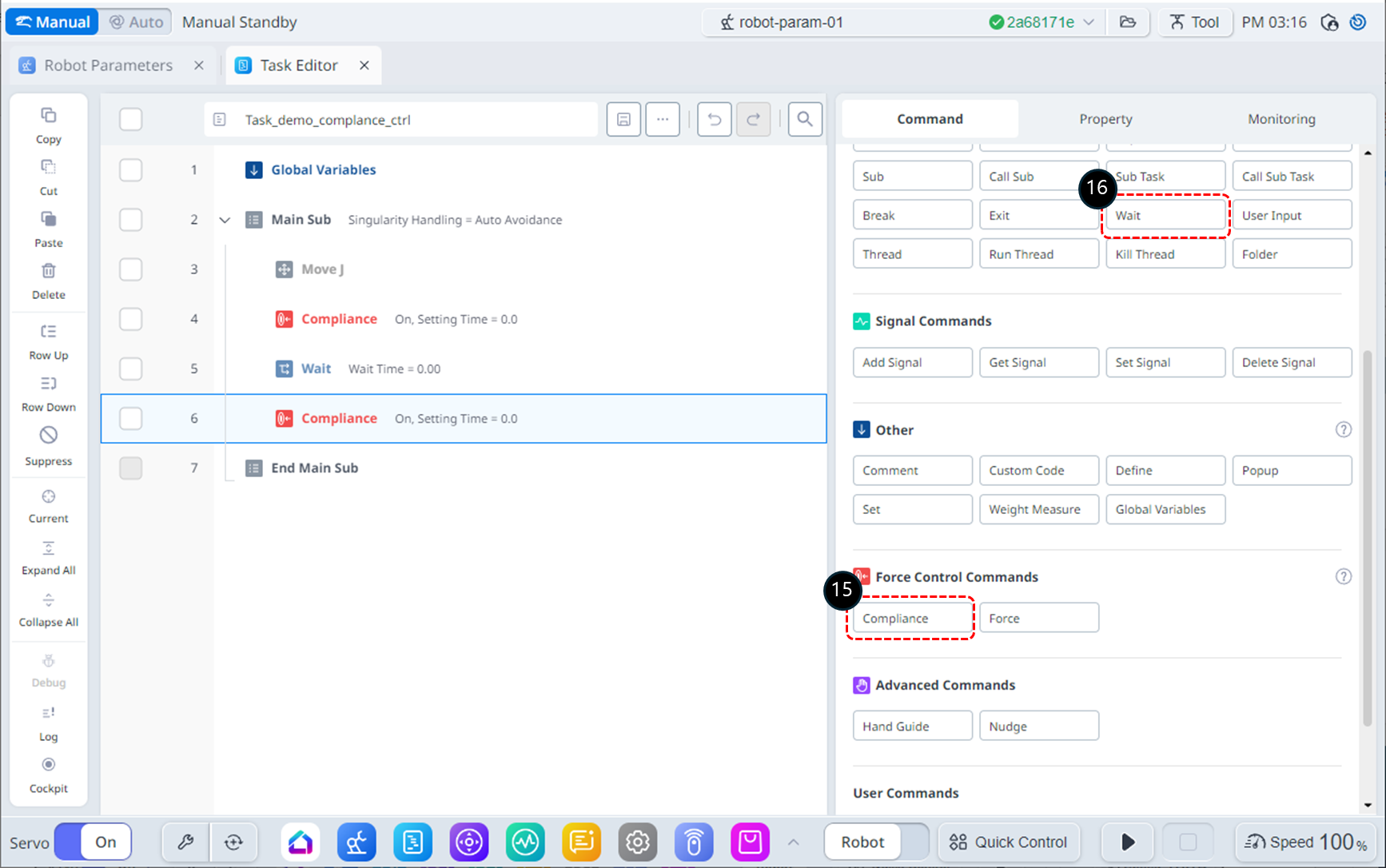
Ajoutez deux commandes Compliance. Ces commandes seront utilisées pour activer et désactiver le contrôle de conformité.
Insérez une commande attendre entre les commandes conformité. Cette commande wait sera utilisée pour maintenir le contrôle de conformité.
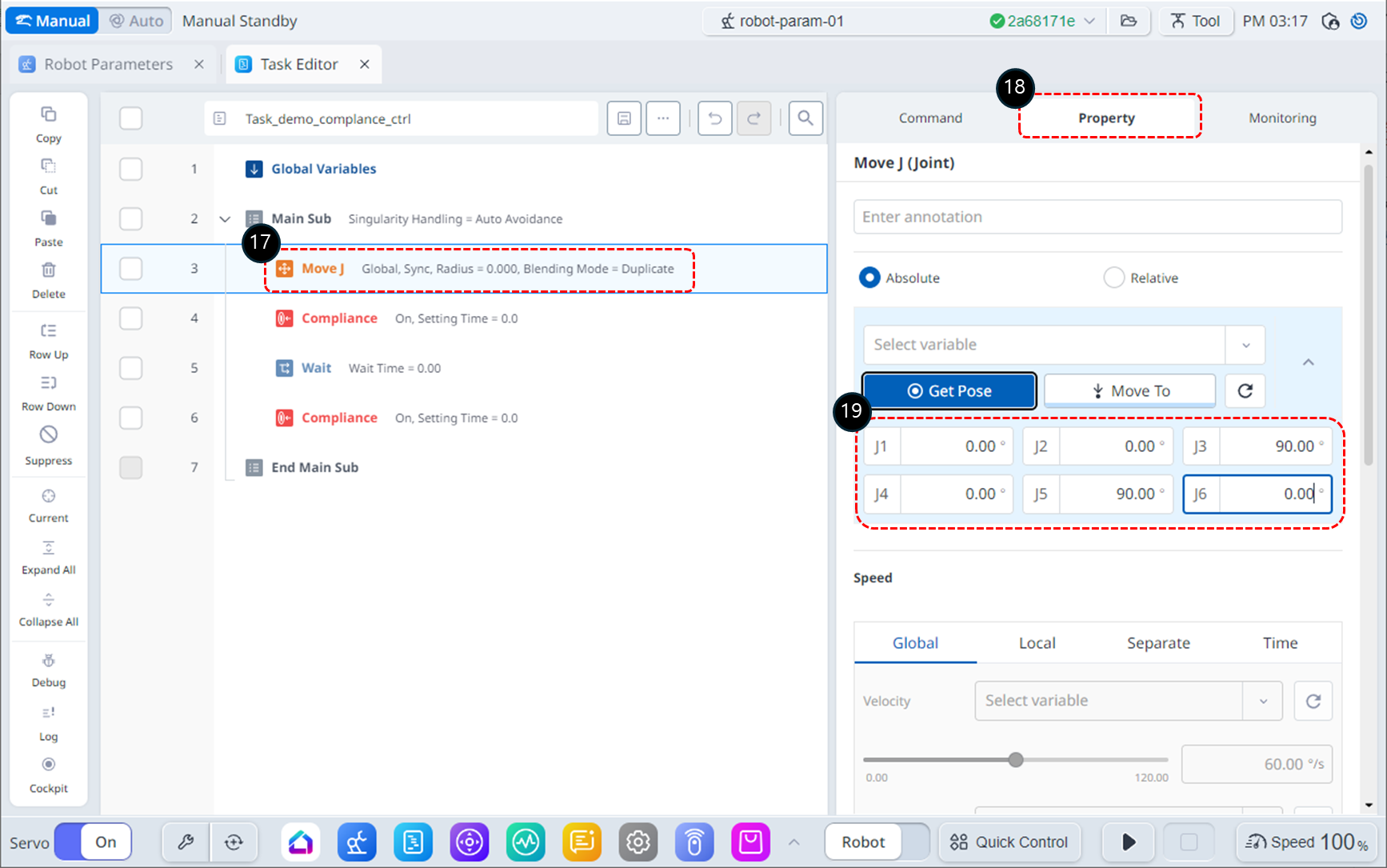
Sélectionnez la commande MoveJ sur la ligne 3.
Choisissez l'onglet propriété.
Modifier la position cible de MoveJ à (0, 0, 90, 0, 90, 0) DEG. En fonction de l'espace d'installation du robot, l'angle de J1 peut être ajusté si nécessaire.
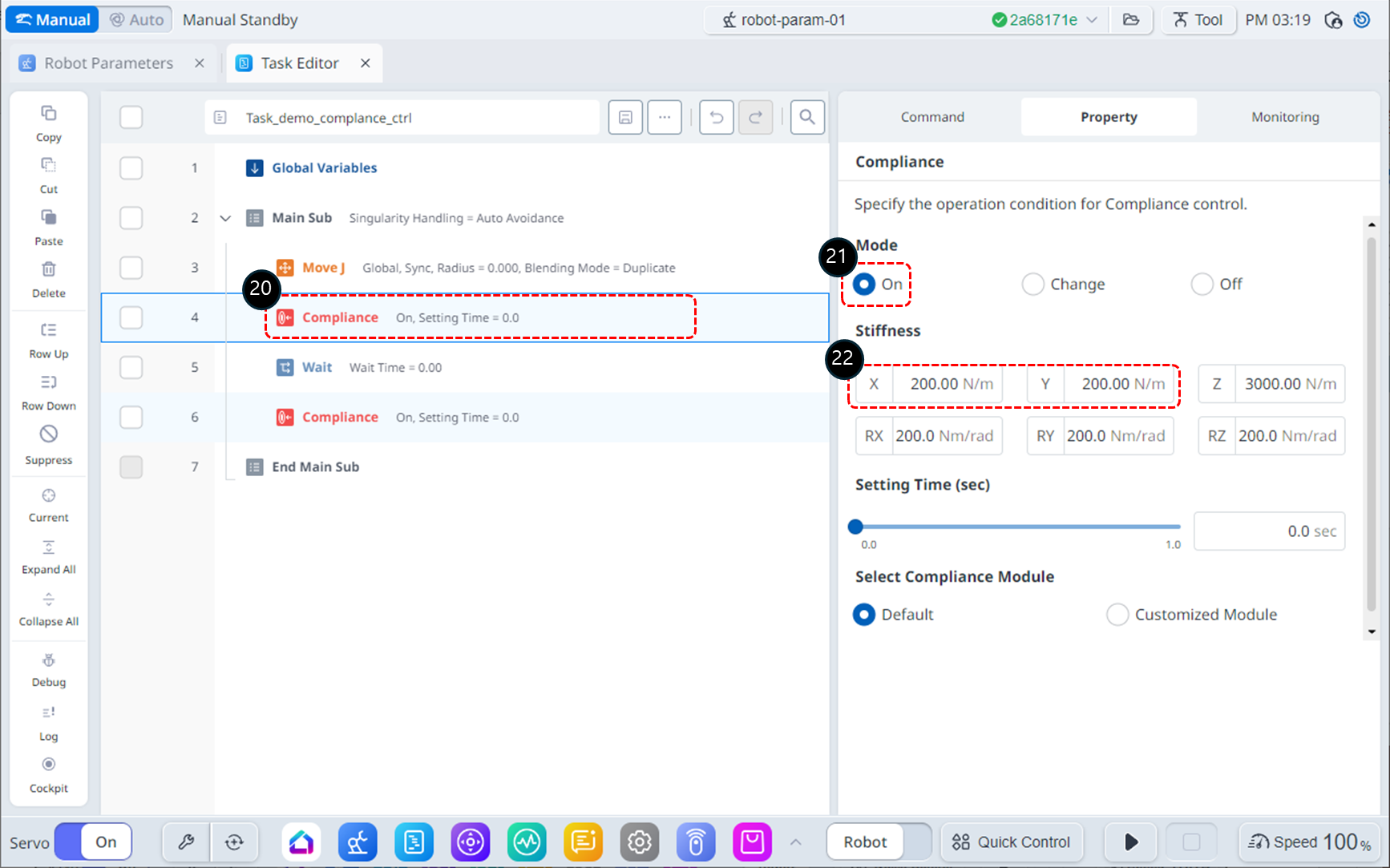
Sélectionnez la commande conformité à la ligne 4.
Dans l'onglet propriété, définissez le mode comme suit : Le mode activé active le contrôle de conformité.
Mode : On
Définissez la raideur comme suit : Réduisez la raideur dans les directions X et y pour que le robot réagisse plus doucement dans ces directions.
X : 200 N/m
Y : 200 N/m
Z : 3000 N/m (par défaut)
Rx, Ry, Rz : 200 Nm/rad (par défaut)
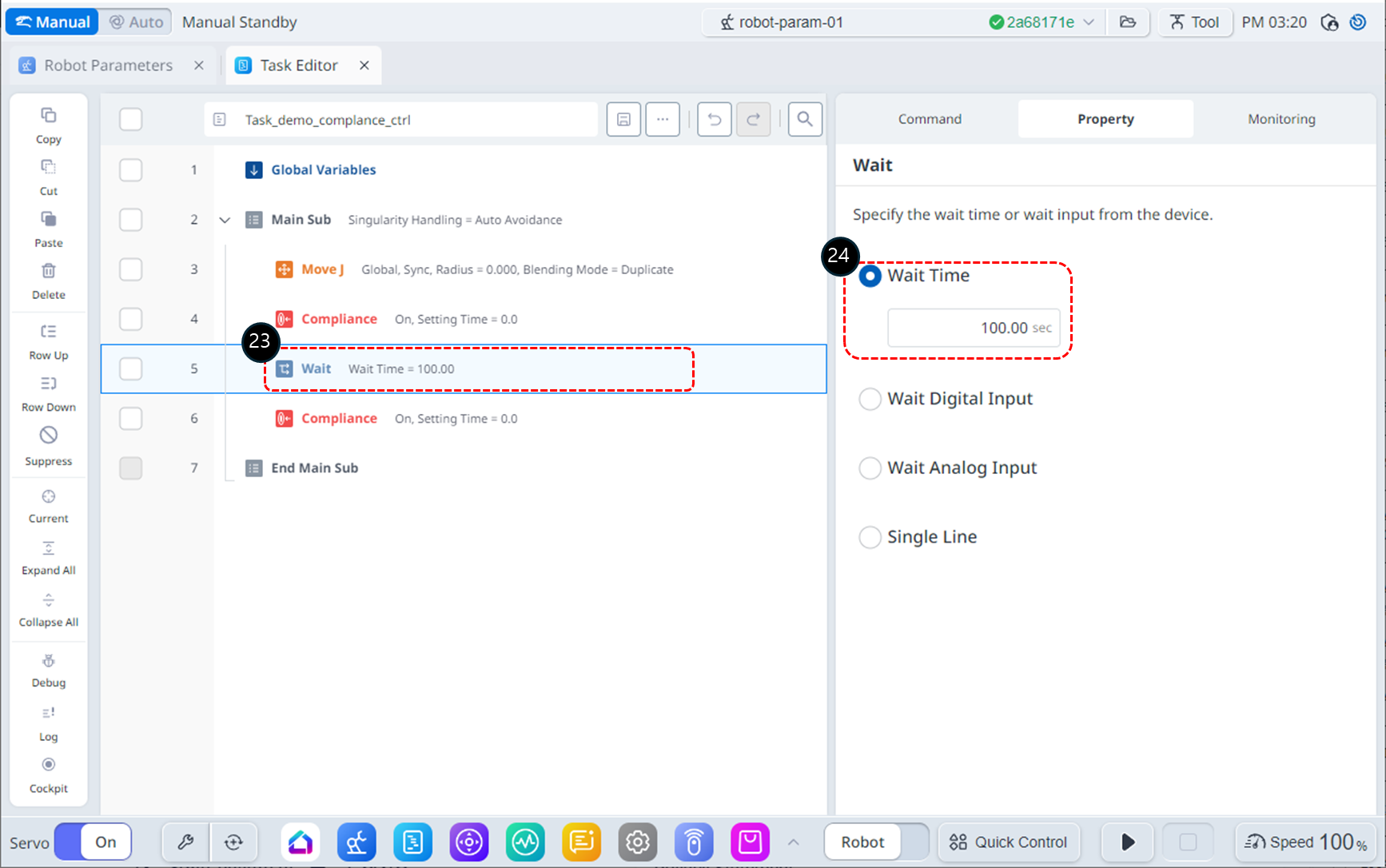
Sélectionnez la commande attendre à la ligne 5.
Réglez le temps d'attente comme suit.
Temps d'attente : 100 s
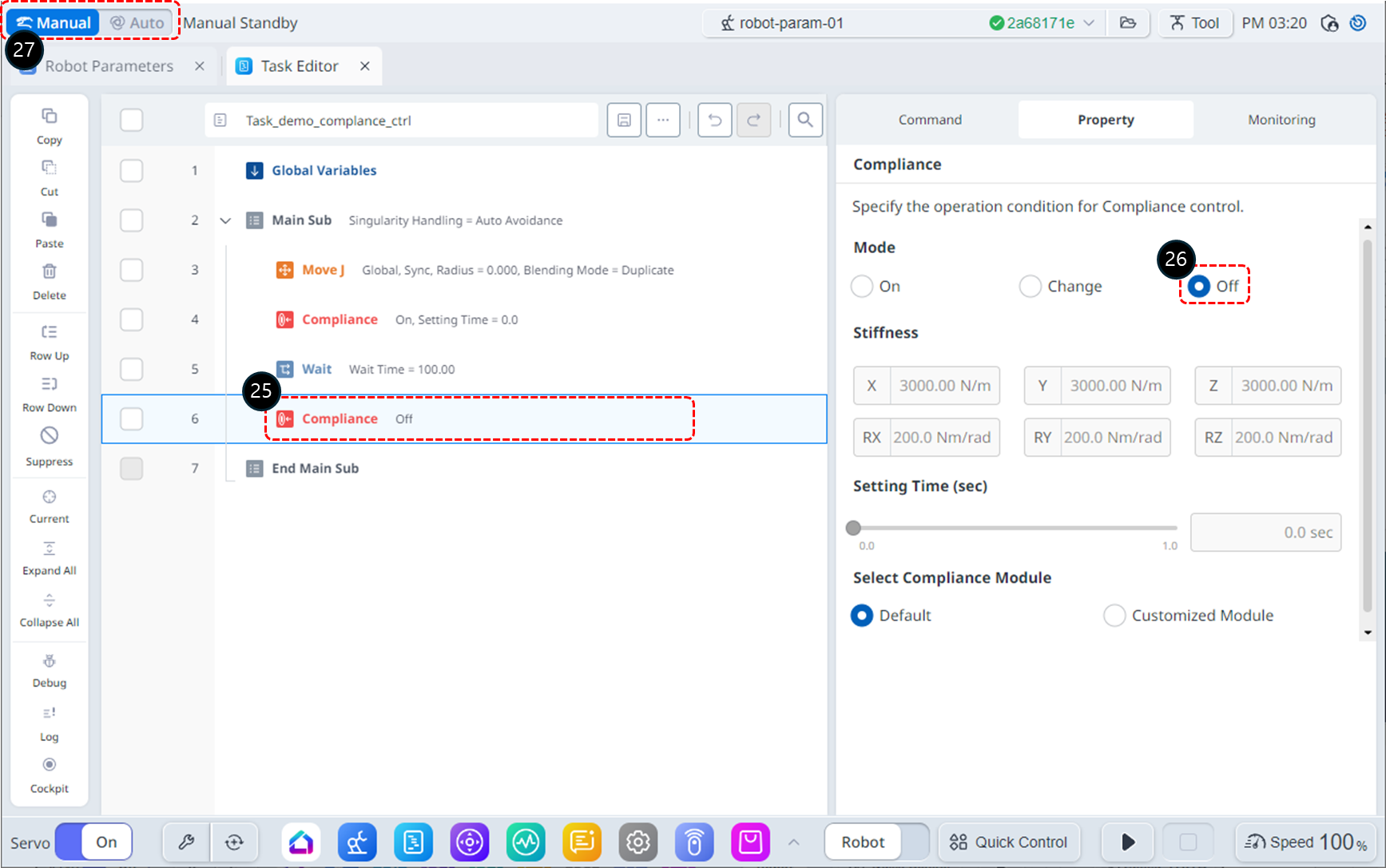
Sélectionnez la commande conformité à la ligne 6.
Dans l'onglet propriété, définissez le mode comme suit : Le mode désactivé désactive le contrôle de conformité.
Mode : Off
Réglez le mode de fonctionnement sur Auto. L'onglet propriété passe automatiquement à l'onglet surveillance.
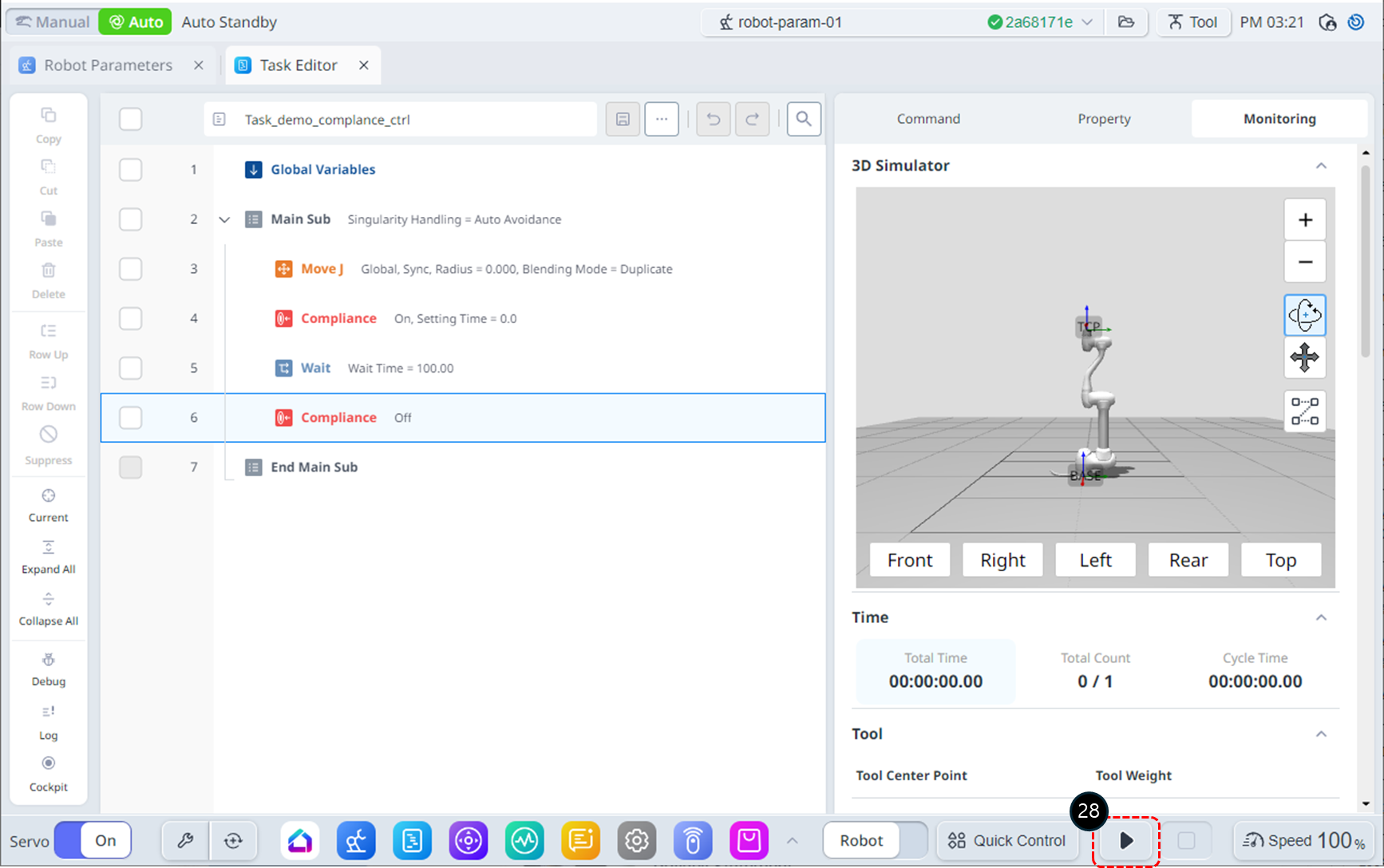
Cliquez sur le bouton exécuter. Le robot se déplace vers la position de départ, lance le contrôle de compliance et reste immobile pendant 100 secondes. Pendant ce temps, poussez doucement l'effecteur du robot vers le corps du robot. Le robot s'arrêtera avec une erreur de collision (ou une erreur de limite de force TCP). Dans l'état d'arrêt de sécurité causé par la collision, la LED du robot s'affiche en jaune.
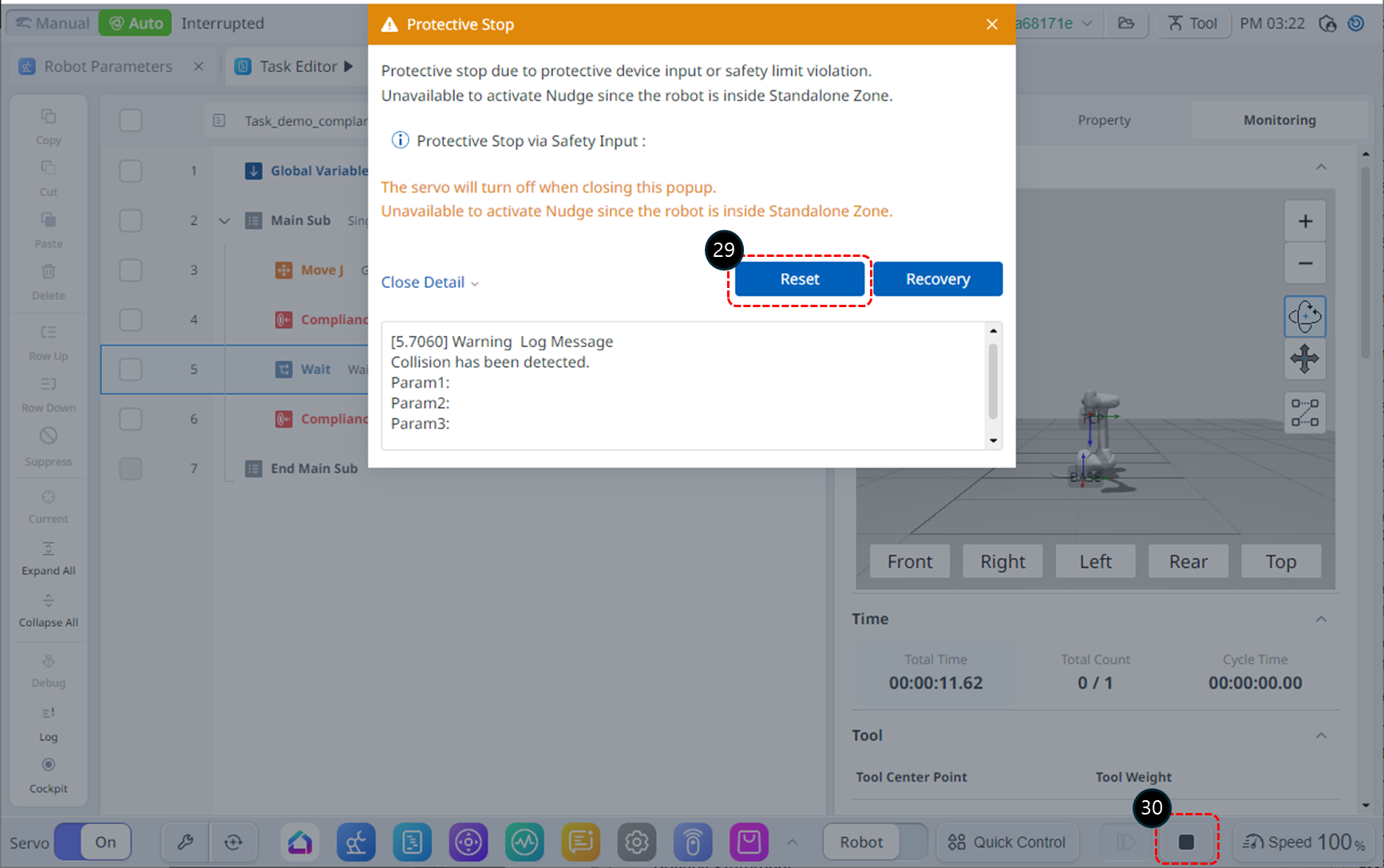
Cliquez sur le bouton Réinitialiser dans la fenêtre d'avertissement d'arrêt de sécurité. Le programme de tâches reprend son fonctionnement.
Cliquez sur le bouton arrêter pour mettre fin au programme.
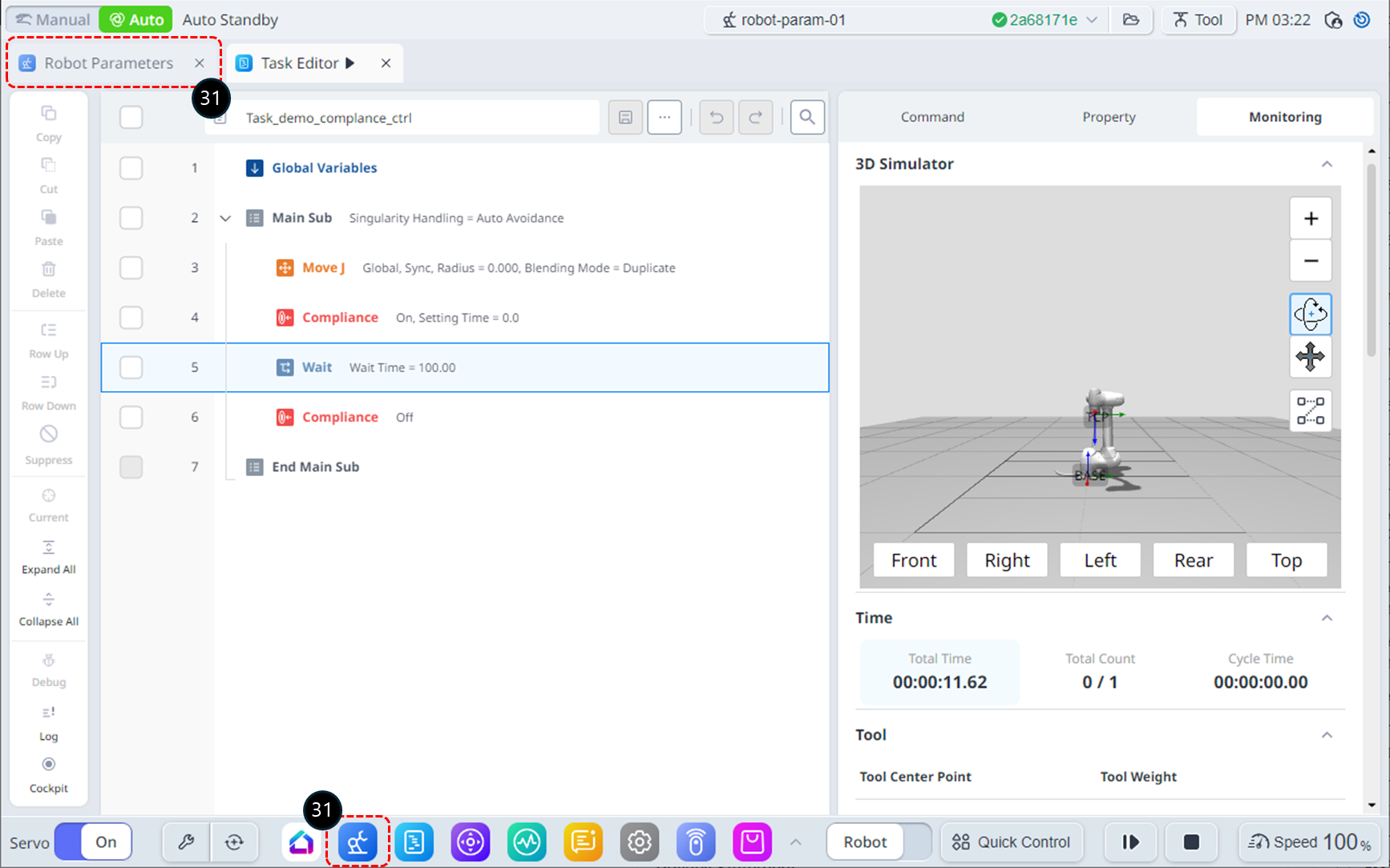
Pour résoudre les problèmes de collision, la sensibilité de collision dans les paramètres de sécurité doit être abaissée. (S'il y a un problème de limite de force TCP, le paramètre de force TCP doit être augmenté.) Sélectionner le module robot Parameters dans le menu inférieur. Vous pouvez également sélectionner l'onglet du module Paramètres du robot dans le coin supérieur gauche, qui fonctionne de la même manière.
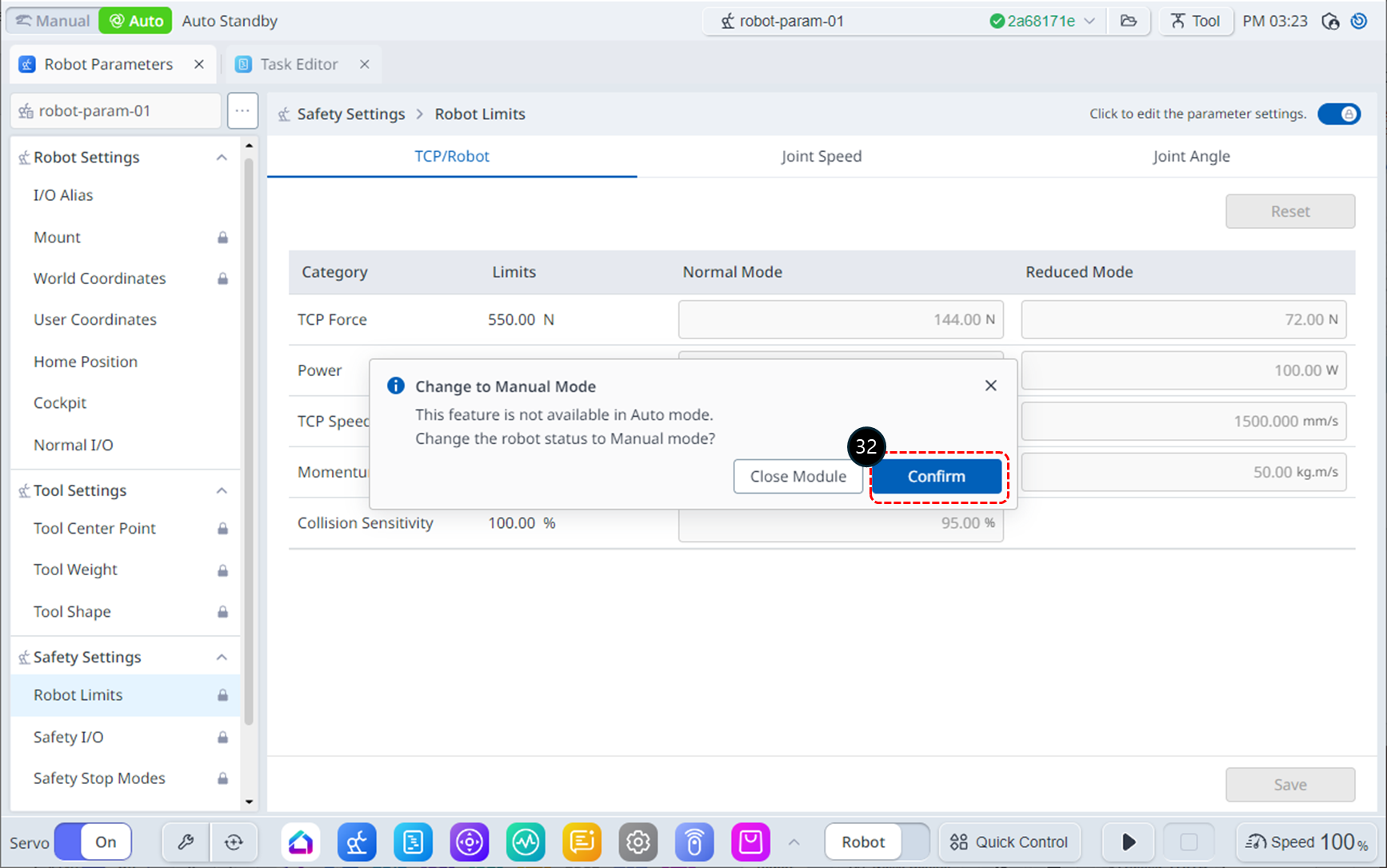
En mode Auto, l'accès au module Paramètres du robot déclenche une fenêtre de notification. Cliquez sur le bouton confirmer pour passer en mode Manuel.
Sélectionnez limites du robot dans Paramètres de sécurité.
Activer l'état d'édition des paramètres. Si une fenêtre de saisie de mot de passe apparaît, reportez-vous aux étapes 6 à 7.
Réglez la sensibilité de collision sur 50 %.
Cliquez sur le bouton Enregistrer pour enregistrer les paramètres. Si la fenêtre vérification des paramètres du robot s'affiche, vérifier les modifications et cliquer sur le bouton appliquer.
Sélectionnez l'onglet du module Editeur de tâches.
Passez en mode Auto pour exécuter le programme de tâches.
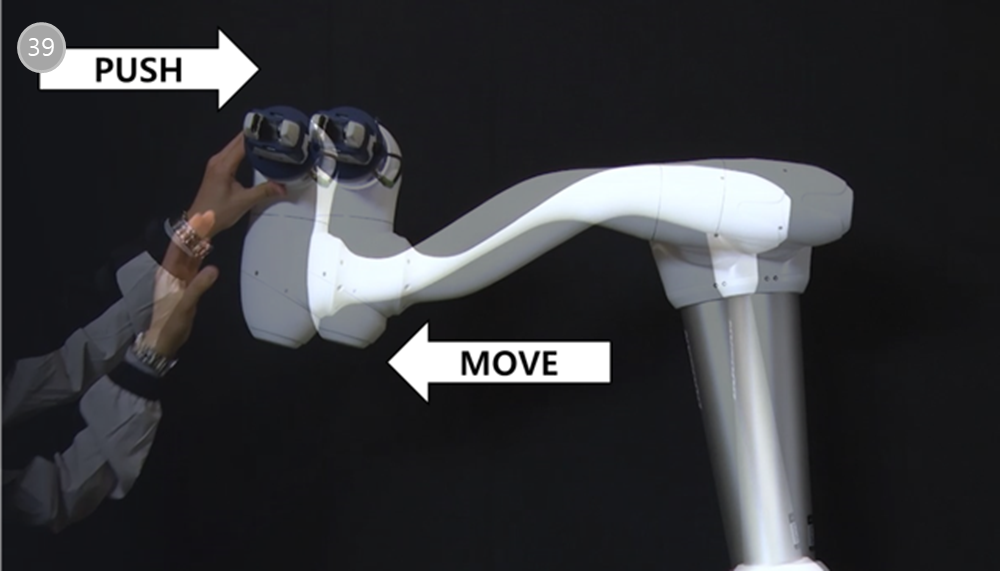
Cliquez sur le bouton exécuter. Pendant le temps d'attente, poussez doucement l'effecteur terminal du robot vers le corps du robot. Le robot se déplacera en raison de la force de poussée, et une fois que vous relâchez votre main, il retournera à sa position d'origine.