Présentation de la limite d'espace et de la forme des zones
Comment définir la forme de la limite d'espace/zone est comme suit.
Éléments
Description
Cuboïde
La forme de la limite d'espace/zone est créée comme un cuboïde.
Entrez l'extrémité inférieure (point 1) et l'extrémité supérieure (point 2) du cuboïde et appuyez sur le bouton Enregistrer la pose .
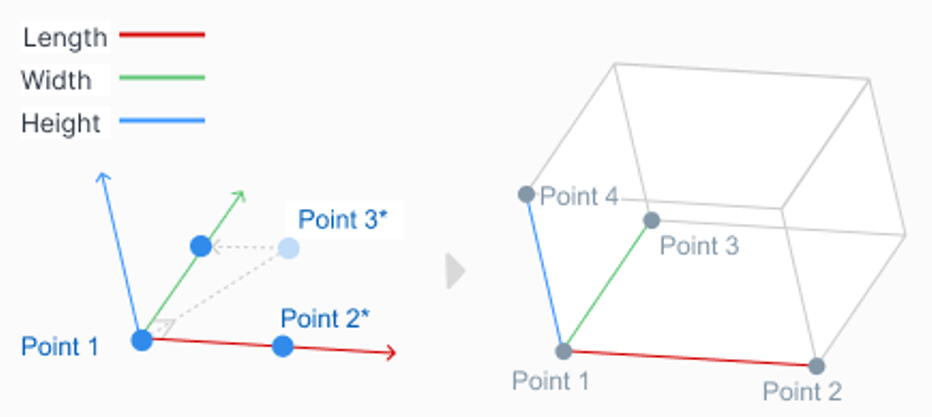
Cuboïde incliné
La forme de la limite d'espace /zone est créée comme un cuboïde incliné.
Réglage par 4 points
Entrez le point de référence (point 1), le point final de l'axe x (point 2), le point final de l'axe y (point 3) et le point final de l'axe z (point 4) du cuboïde incliné et appuyez sur le bouton Enregistrer la pose.
3 lignes (point 1-point 2, point 1-point 3, point 1-point 4) doivent se croiser à angle droit. (un écart de +/- 5 degrés est acceptable)
Si vous utilisez des fonctions de mouvement contraint telles que « contrainte de plan » et « contrainte d'axe » dans le Cockpit en utilisant le point 1 comme point de référence, les points pour le point 2, le point 3 et le point 4 sont plus faciles à trouver.
Réglage par 3 points et hauteur
Entrez le point de référence (point 1), le point sur l'axe x (point 2) et le point sur le plan xy (point 3).
L'emplacement du point sur le plan xy (point 3) détermine la direction de l'axe y, qui est perpendiculaire à la droite formée par le point de référence (point 1) et le point sur l'axe x (point 2) et situé sur le plan xy.
Une fois le point de référence, la direction de l'axe x et la direction de l'axe y déterminés, la direction de l'axe z est déterminée par la règle de droite.
Une fois le point de référence et les trois directions de l'axe déterminés, la taille du parallélépipède incliné peut être spécifiée en définissant la longueur, la largeur et la hauteur.
Le cuboïde incliné peut être déplacé parallèlement (translation parallèle) en définissant le décalage x, y et z.
Après avoir atteint le point d'extrémité (sommet) du cuboïde incliné en appuyant sur "déplacer vers" à côté du point réel 1 , puis en appuyant sur "déplacer vers" à côté du point réel 2 , du point réel 3ou du point réel 4, le robot TCP le déplace le long du bord du cuboïde incliné aussi loin qu'il peut l'atteindre. La position et la direction du parallélépipède incliné peuvent être vérifiées de cette façon.
Cylindre
La forme de la limite d'espace/zone est créée en tant que cylindre.
Entrez le point à une distance de rayon, le point du plan supérieur et le point du plan inférieur du cylindre, puis appuyez sur le bouton Enregistrer la pose.
Boîte multiplan
La forme de la limite d'espace/zone est créée sous forme de boîte multiplan.
Définissez la hauteur du haut et du bas de la boîte multiplan et appuyez sur le bouton Ajouter une pose pour ajouter un plan.
Sélectionnez les coordonnées X et y pour définir la direction du plan et appuyez sur le bouton Enregistrer la pose. Jusqu'à 6 plans peuvent être configurés.
Définissez les coordonnées du point sur la zone que vous souhaitez définir.
Sphère
La forme de la limite d'espace/zone est créée comme une sphère.
Pour configurer le rayon, entrez les positions du point central et de l'extrémité de la sphère, et pour configurer le diamètre, entrez les deux extrémités de la sphère, puis appuyez sur le bouton Enregistrer la pose.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.