Modo de recuperación de software
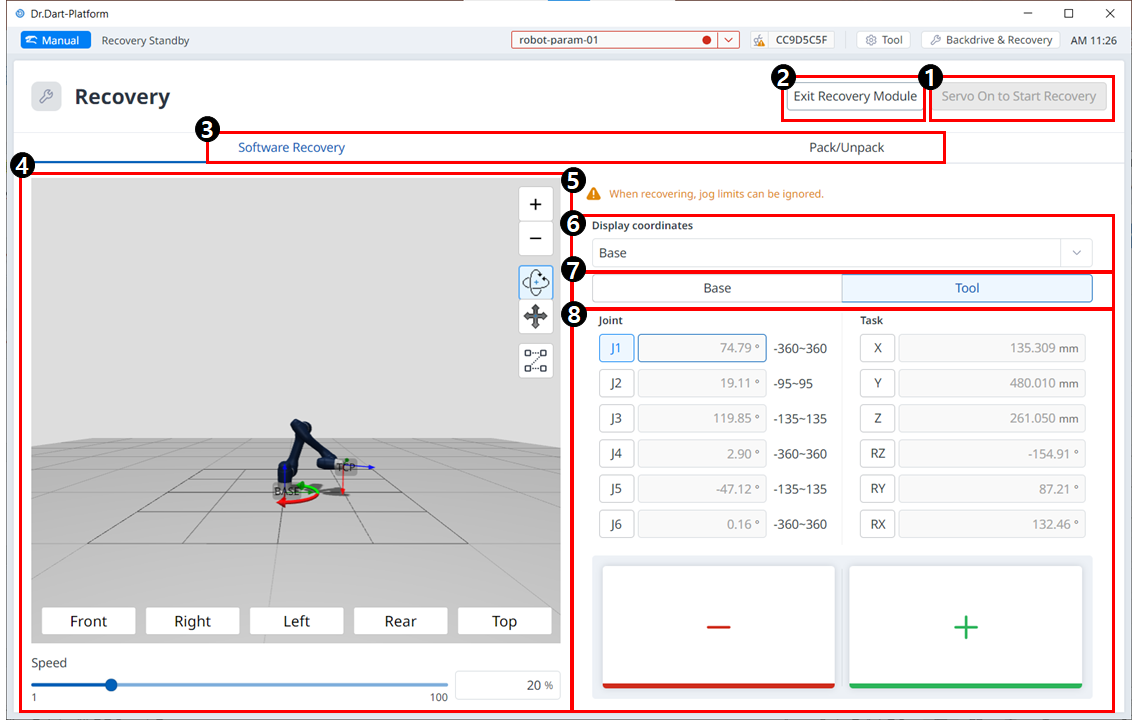
Elementos de menú
|
|
Elemento |
Descripción |
|---|---|---|
|
1 |
Servo activado para iniciar la recuperación |
Este es un botón para activar el servo antes de entrar en el modo de recuperación. |
|
2 |
Salga de la recuperación |
Este botón le permite salir del módulo de recuperación. |
|
3 |
Encabezado |
Esta sección le permite seleccionar el modo de recuperación de software o el modo de empaquetado/desempaquetado. |
|
4 |
Simulación 3D |
Esta área le permite previsualizar una simulación 3D de los valores establecidos. |
|
5 |
Mensaje de advertencia |
Esto explica las precauciones. |
|
6 |
Visualizar coordenadas |
Aquí es donde puede establecer la coordenada basada en Base o Mundo. |
|
7 |
Botón Base/Herramienta |
Aquí es donde puede establecer el valor basado en Base o Herramienta. |
|
8 |
Conjunto/Tarea |
Esta sección le permite introducir los valores deseados para hacer que el robot se mueva. |
Para utilizar el modo de recuperación de software, siga estos pasos:
-
Toque el menú Recuperación en la ventana Menú principal. La pantalla de recuperación de software aparece automáticamente en la ventana de recuperación.
-
Toque cada botón de unión en el lado derecho de la pantalla de recuperación de software, y utilice
-
Para obtener definiciones de los botones de la cabina, consulte Cabina
-
Los cambios realizados en la configuración se reflejan en la ventana de simulación de la izquierda en tiempo real.
-
-
Cuando la configuración esté completa, toque el botón X en la parte superior izquierda para cerrar la ventana.
El modo de reparación de software no está disponible cuando el límite del ángulo de la junta se excede en 3 grados.