Ausrichtung auf der Grundlage von Installationen
Dient der Ausrichtung von TCP des Roboters auf der Grundlage einer eingerichteten Installation.
- Den Bildschirm Align (Ausrichten) auswählen und dort die Parallel zum Installationsbereich auswählen.
- Die gewünschte Einstellung unter Workcell Item (Installation) auswählen.
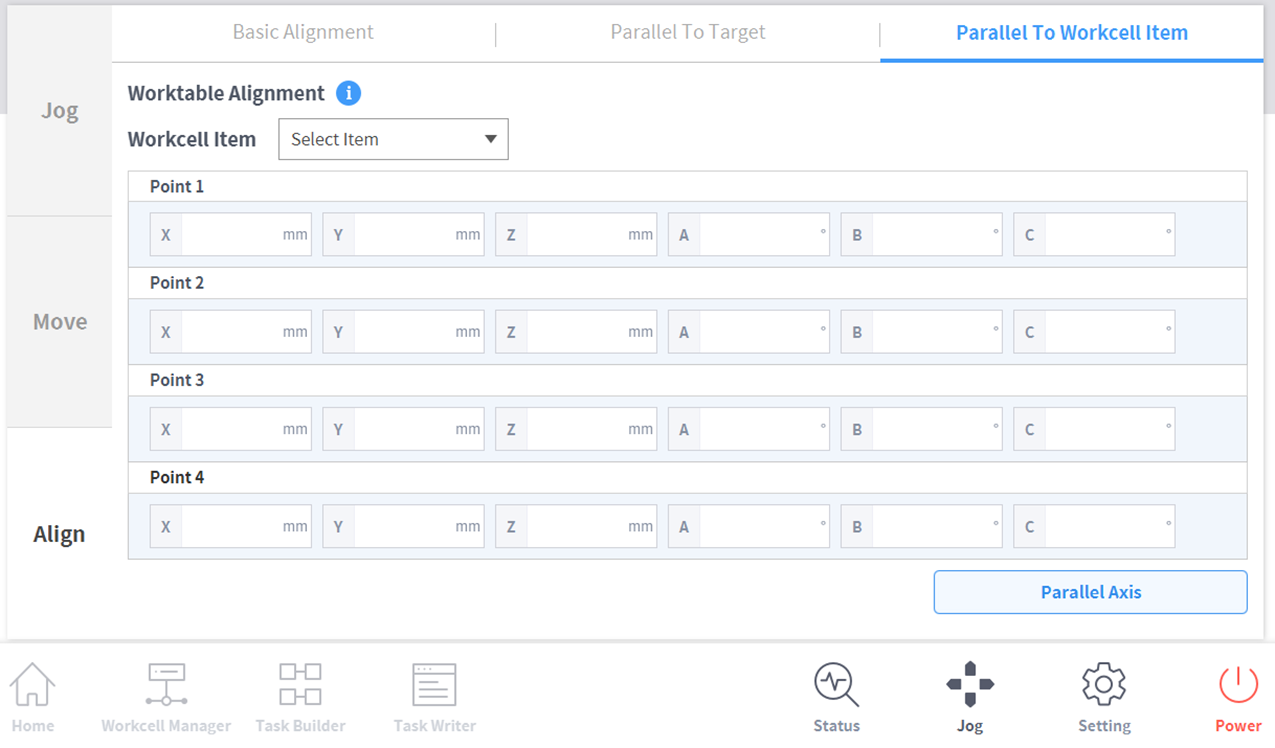
- Die Schaltfläche Align Axis (Achse ausrichten) antippen und halten, um die Achse auszurichten.
Hinweis
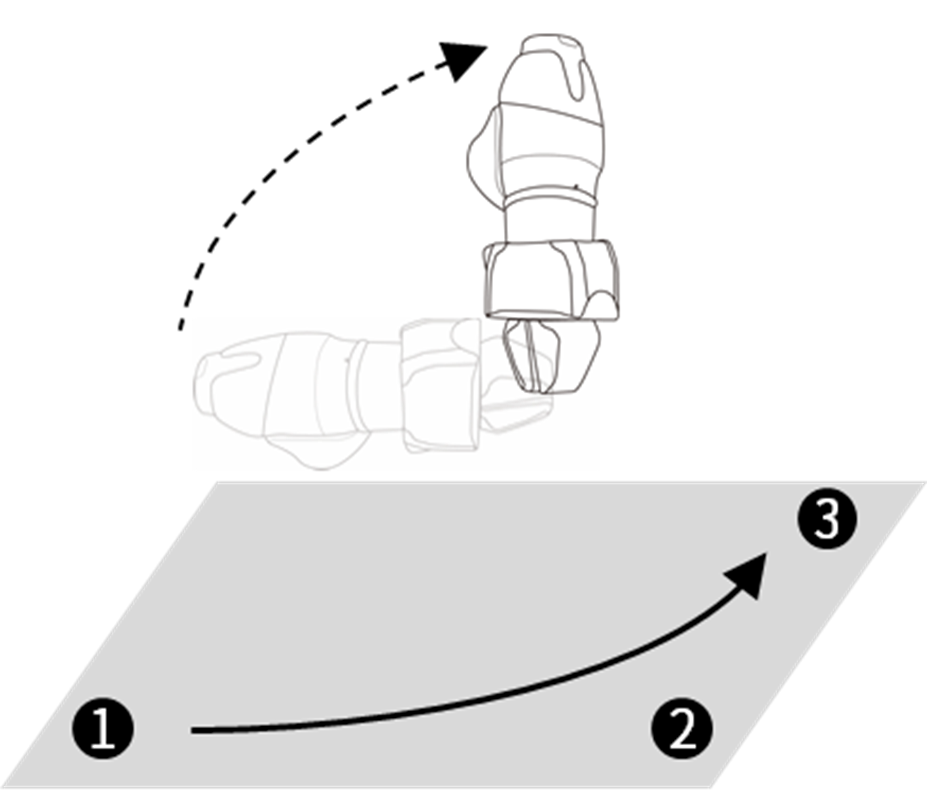
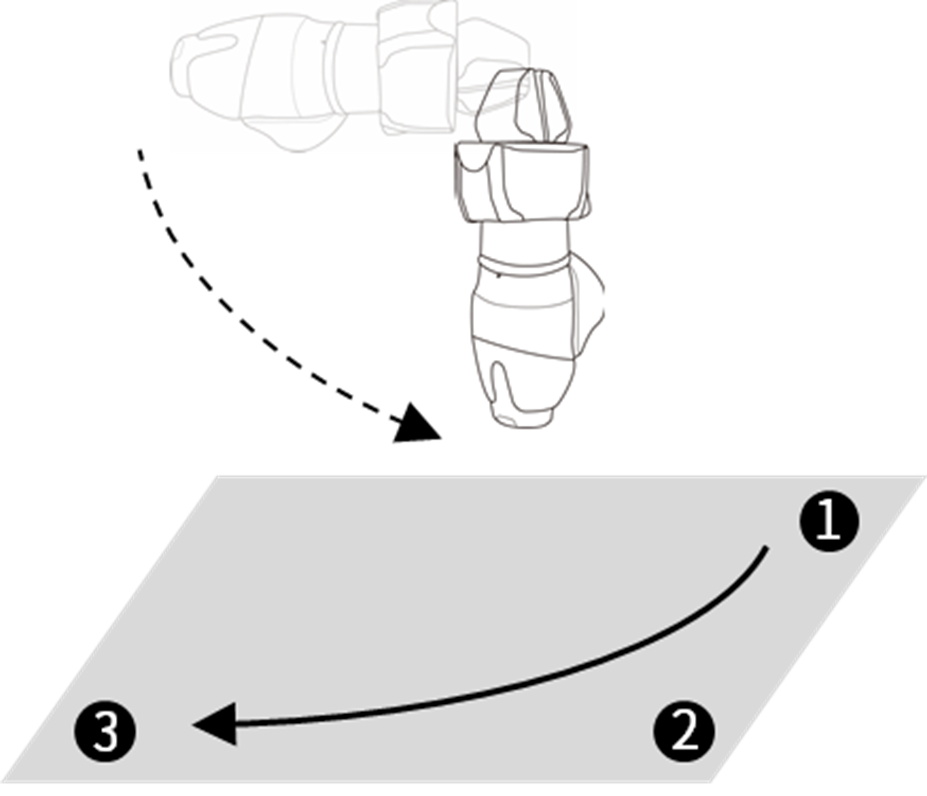
- Die Sortierrichtungen für Ausrichtung auf der Grundlage des Ziels und Ausrichtung auf der Grundlage von Installationen werden abhängig davon bestimmt, ob die Einlernsequenz der drei eingelernten Punkte in der Installation im Uhrzeigersinn oder gegen den Uhrzeigersinn vorgenommen wurde. [Siehe nachstehende Abbildung]