
Ausrichtung auf der Grundlage des Ziels
Diese Funktion ist beim Einlernen des Werkstücks nützlich, wenn das Werkstück am TCP in einer Achsenrichtung ausgerichtet ist. Um das Einlernen nach der Arretierung der Stellung durchzuführen, kann die direkte Einlernfunktion mit arretierter Ebene oder Geraden über die Steuerpulttasten verwendet werden.
Zur Ausrichtung von TCP des Roboters basierend auf dem Ziel sind folgende Schritte zu befolgen:
- Registerkarte Align (Ausrichten) und dann die Registerkarte Parallel To Target (Parallel zum Ziel) auswählen.
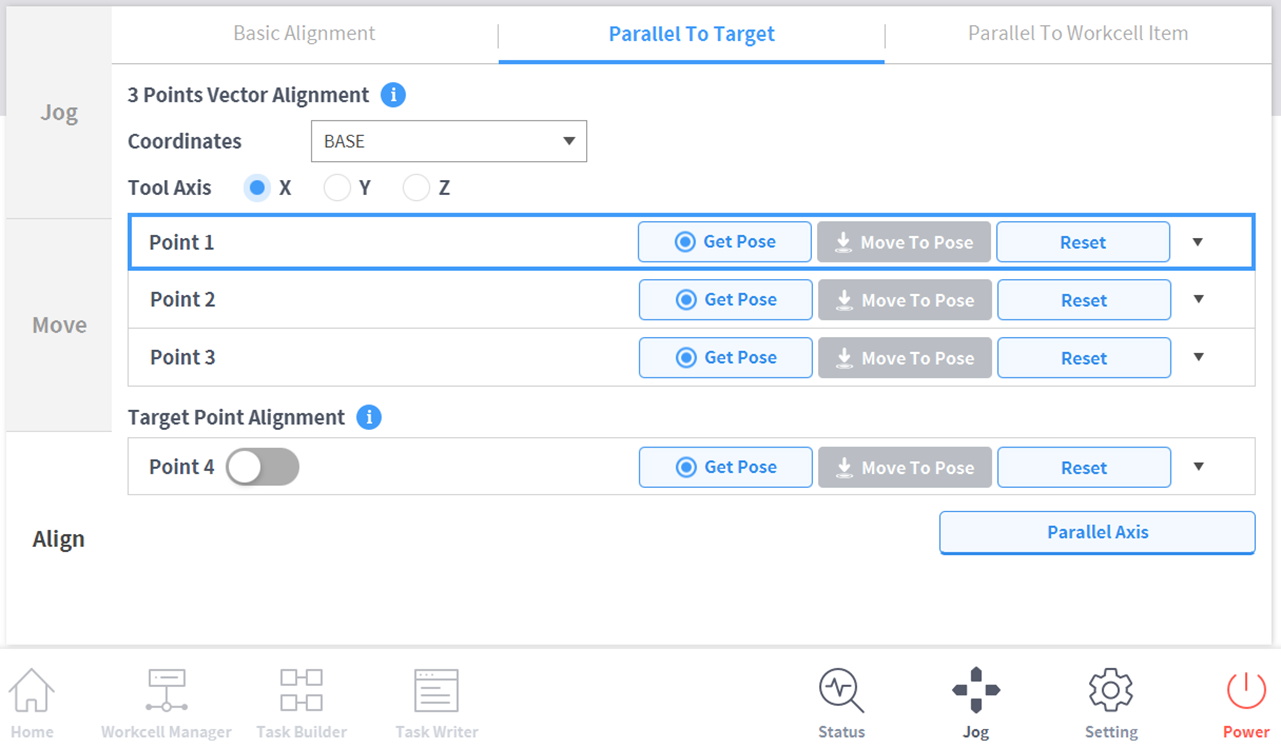
- Bezugskoordinaten für die Ausrichtung auswählen.

- Die auszurichtende Werkzeugachse auswählen.

- Roboter zur gewünschten Position bewegen und Point 1 (Punkt 1) antippen.
- Schaltfläche Save Pose (Stellung speichern) für Point 1 (Punkt 2) antippen.
- Punkt 2 und Punkt 3 werden in gleicher Weise eingerichtet. Nach dem Festlegen aller Einstellungen wird eine virtuelle Vektorfläche auf der Grundlage von drei Punkten eingerichtet.

- Punkt 2 und Punkt 3 werden in gleicher Weise eingerichtet. Nach dem Festlegen aller Einstellungen wird eine virtuelle Vektorfläche auf der Grundlage von drei Punkten eingerichtet.
- (Optional) Um TCP-Richtung und Position zusammen festzulegen, die Umschaltfläche von Point 4 (Punkt 4) drücken, den Roboter an die gewünschte Position bewegen und die Schaltfläche „Save Pose“ (Stellung speichern) antippen.
- Die Schaltfläche Align Axis (Achse ausrichten) antippen und halten, um die Achse auszurichten.
- Den 6-Achsen-Kopf 150 mm oberhalb des Ziels in der Z-Achsen-Richtung anordnen.