Robotergrenzen und -Sicherheit
Einstellung Der Robotergrenzen
In Robotergrenzen können verschiedene Grenzwerte für den Roboter festgelegt werden. Diese Grenzwerte werden verwendet, um sicherzustellen, dass der Roboter innerhalb der festgelegten Grenzwerte sicher funktioniert.
Robotergrenzen können unter Robot Parameter > Sicherheitseinstellungen > Robotergrenzen festgelegtwerden.
Eine ausführliche Beschreibung der einzelnen Grenzwerte enthält der Abschnitt Robotergrenzen.
Robotergrenzen sind weitgehend in drei Kategorien unterteilt. Jede Kategorie umfasst die folgenden Bildschirme und Funktionen.
Menü
Artikel | Beschreibung | |
|---|---|---|
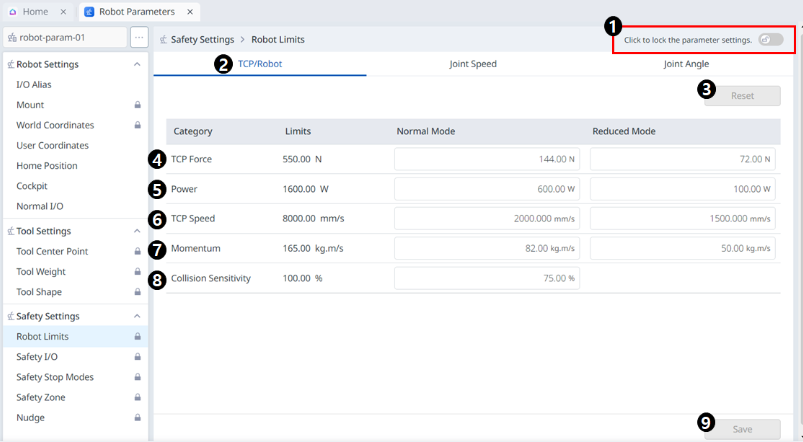
| 1 | Umschalttaste sperren | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | TCP/Roboter | Große Klassifizierung der Robotergrenzen. |
| 3 | Zurücksetzen | Wird zum Zurücksetzen der Einstellungen verwendet. |
| 4 | Kraft | Wird zum Einstellen der Kraft verwendet. |
| 5 | Leistung | Wird zum Einstellen der Leistung verwendet. |
| 6 | Geschwindigkeit | Wird zum Einstellen der Geschwindigkeit verwendet. |
| 7 | Momentum | Wird verwendet, um den Momentum zu setzen. |
| 8 | Kollision | Dient zum Festlegen der Kollision. |
| 9 | Speichern | Wird zum Speichern der entsprechenden Einstellung verwendet. |
Menü
Artikel | Beschreibung | |
|---|---|---|
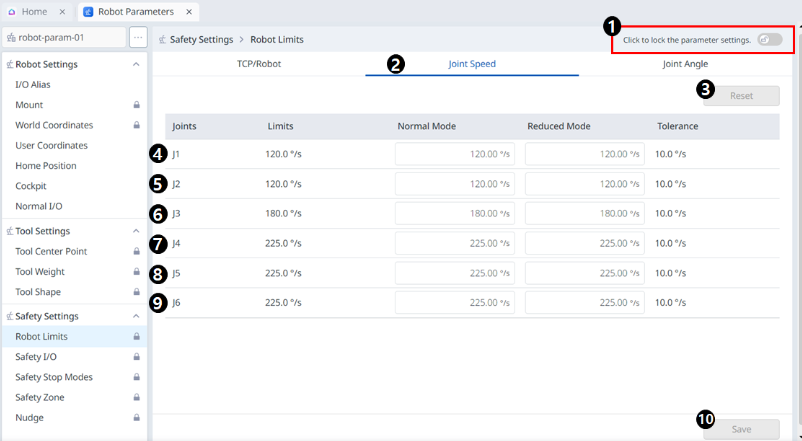
| 1 | Umschalttaste sperren | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | Gelenkgeschwindigkeit | Große Klassifizierung der Robotergrenzen. |
| 3 | Zurücksetzen | Wird zum Zurücksetzen der Einstellungen verwendet. |
| 4 | J1 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 5 | J2 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 6 | J3 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 7 | J4 (inaktiv bei Modellen der P-Serie) | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 8 | J5 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 9 | J6 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 10 | Speichern | Wird zum Speichern der entsprechenden Einstellung verwendet. |
Menü
Artikel | Beschreibung | |
|---|---|---|
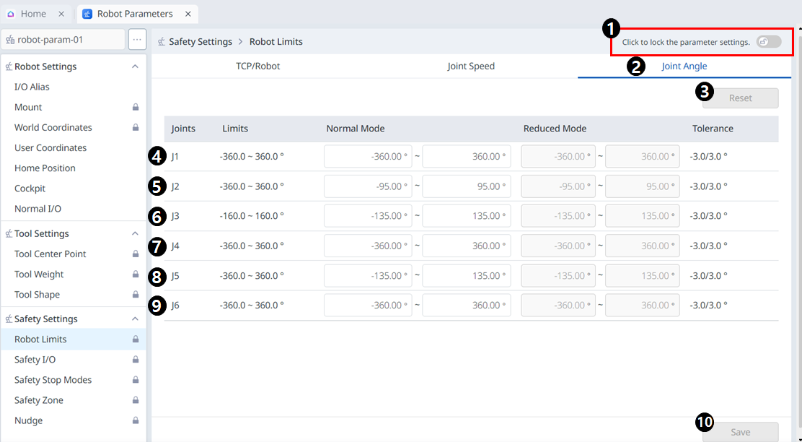
| 1 | Umschalttaste sperren | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | Gelenkwinkel | Große Klassifizierung der Robotergrenzen. |
| 3 | Zurücksetzen | Wird zum Zurücksetzen der Einstellungen verwendet. |
| 4 | J1 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 5 | J2 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 6 | J3 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 7 | J4 (inaktiv bei Modellen der P-Serie) | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 8 | J5 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 9 | J6 | Dient zum Festlegen der Einstellungen für den normalen bzw. den reduzierten Modus. |
| 10 | Speichern | Wird zum Speichern der entsprechenden Einstellung verwendet. |
Sicherheits-E/A-Einstellung
Diese Funktion gibt sicherheitsrelevante Signale über eine redundante Klemme ein bzw. aus. Wenn ein Signal erkannt wird , das sich vom redundanten Sicherheitseingang oder -Ausgangssignal unterscheidet, ermittelt das System, ob es sich um einen Kurzschluss oder einen Hardwarefehler handelt, und stoppt den Roboter im STO-Stoppmodus.
Safety Signal I/O) kann unter Robot Parameters > Safety Settings > Safety I/O (Roboterparameter > Sicherheitseinstellungen > Sicherheits-I/O) eingestelltwerden.
Weitere Informationen finden Sie unter Sicherheitssignal E/A .
Eingabe
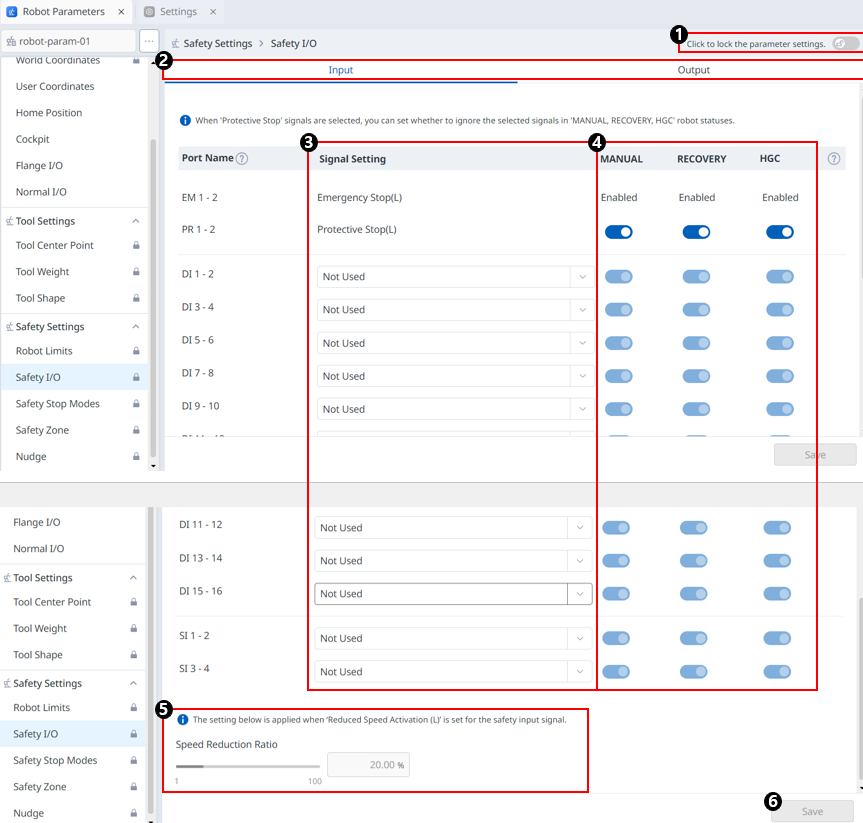
Menü
Artikel | Beschreibung | |
|---|---|---|
| 1 | Umschalttaste sperren | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | Eingang/Ausgang | Es kann entweder Ein-/Ausgang ausgewählt werden. |
| 3 | Signaleinstellung | Für jeden Port festgelegte Optionen. Not Used |
| 4 | Je nach Roboterstatus wählen, ob das Signal ignoriert werden soll | Wenn Sie das Signal „Protective Stop“ auswählen, können Sie festlegen, ob das ausgewählte Signal im roboterstatus „MANUAL, RECOVERY, HGC“ ignoriert werden soll. |
| 5 | Schieberegler Für Geschwindigkeitsreduzierunga | Die Geschwindigkeitsreduzierungsrate kann direkt eingegeben werden. Er kann auf einen Wert zwischen 0 und 100 % eingestellt werden. |
| 6 | Speichern | Mit dieser Schaltfläche können Sie die eingegebene Einstellung speichern. |
Ausgabe
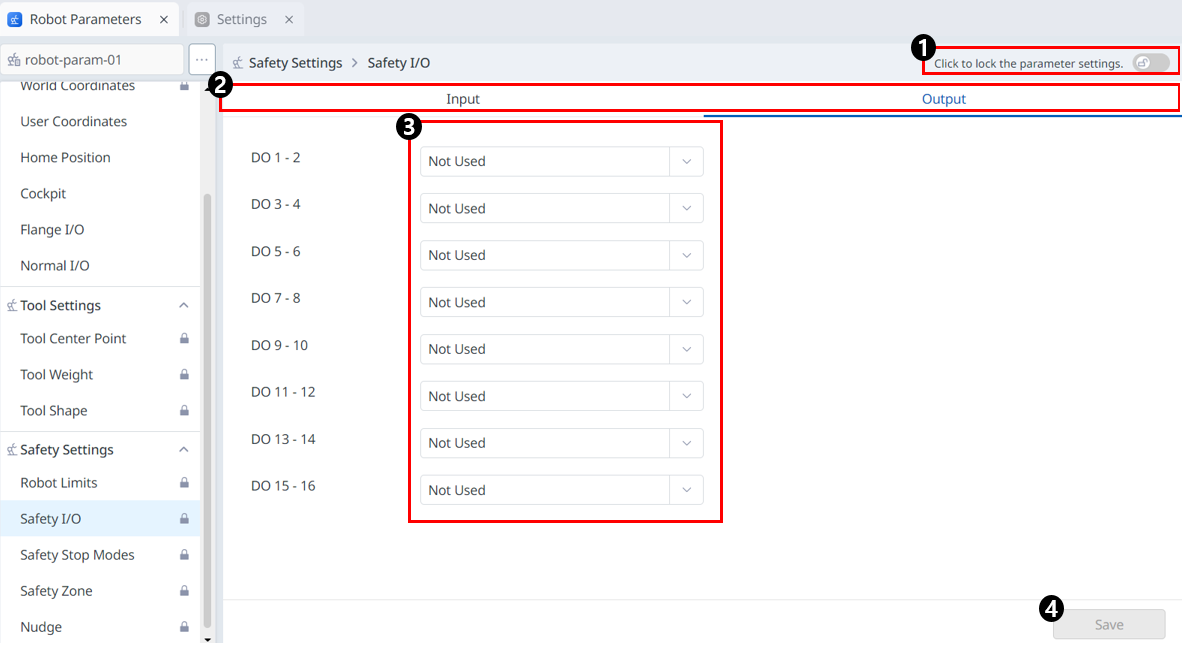
Menü
Artikel | Beschreibung | |
|---|---|---|
| 1 | Umschalttaste sperren | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | Eingang/Ausgang | Es kann entweder Ein-/Ausgang ausgewählt werden. |
| 3 | Signaleinstellung | Für jeden Port festgelegte Optionen. Not Used |
| 4 | Speichern | Mit dieser Schaltfläche können Sie die eingegebene Einstellung speichern. |
Einstellung der Sicherheitsstoppmodi
Lernen Sie die Arten von Sicherheitsanschlägen und wie Sie Sicherheitsanschläge aktivieren/deaktivieren.
Arten von Sicherheitsanschlägen
Die folgenden Stoppmodi sorgen für die Sicherheit des Benutzers:
STO (Safe Torque Off): Stoppt Servo aus (Motorleistung wird sofort ausgeschaltet)
SS1 (Safe Stop 1): Servo aus nach maximalem Verzögerungsstopp
SS2 (Safe Stop 2): Standby nach Stopp der maximalen Verzögerung (Pause)
RS1: Bei einer Kollision bewegt es sich in die entgegengesetzte Richtung der Kollision und wechselt dann in den Standby-Modus (kann nur in Kollisionserkennung/Verletzung des TCP-Kraftgrenzwerts eingestellt werden)
Doosan Robotics Roboter verfügen über zwei Arten von Not-aus-Funktionen. Not-aus wird für allgemeine Notfallsituationen verwendet, und der Roboter kann den Betrieb mit eingeschaltetem Servo wieder aufnehmen, nachdem er den Not-aus-Schalter losgelassen hat. Im Falle eines Not-aus kann der Roboter den Betrieb wieder aufnehmen, indem die Ursache des Not-aus behoben und der Stopp losgelassen wird.
Not-Aus: Sie stellt den Stopp-Modus ein, wenn der Notausschalter des Programmierhandgeräts oder ein zusätzlich installiertes externes Gerät aktiviert wird
Sie wird aktiviert, wenn der Not-aus-Schalter am Programmierhandgerät oder der mit dem TBSFT EM-Terminal verbundene Schalter gedrückt wird.
Es können nur STO oder SS1 ausgewählt werden.
Schutzstopp: Sie stellt den Stopp-Modus ein, wenn die extern angeschlossene Schutzausrüstung aktiviert ist
Sie wird aktiviert, wenn die am TBSFT PR-Terminal angeschlossene Schutzausrüstung aktiviert wird.
Weitere Informationen zu den Sicherheitsstopp-Funktionen finden Sie unter Sicherheitsfunktionen.
Ein-/Ausschalten des Sicherheitsstopps
Drücken Sie den Not-aus-Schalter am Programmierhandgerät, oder aktivieren Sie die Sicherheitsvorrichtung, die mit dem Sicherheits-E/A verbunden ist, um den Not-aus-Schalter zu aktivieren. Sicherheitsgeräte können über Robot Parameters > Sicherheitseinstellungen > Sicherheits-E/A-Funktionen des Bildschirms Teach Pendant an Not-Aus oder Schutz-Aus angeschlossen werden.
Weitere Informationen zum Anschließen eines Sicherheitsgeräts an Sicherheits-E/A finden Sie unter Controller-E/A-Verbindung.
Informationen zum Einstellen der Sicherheitsstopp-Funktion für diesen Anschluss im Programm finden Sie unter Sicherheitssignal E/A.
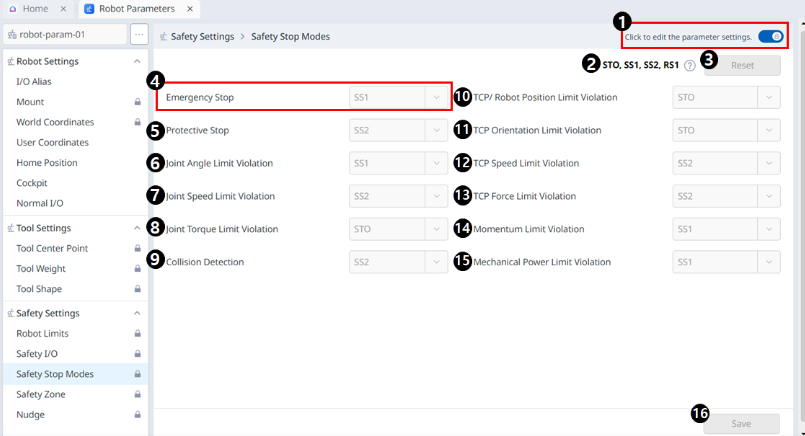
Menü
Artikel | Beschreibung | |
|---|---|---|
| 1 | Umschalttaste sperren | Wird verwendet, um den eingestellten Wert zu sperren. Das Sicherheitskennwort ist erforderlich, um den eingestellten Wert zu ändern. |
| 2 | Informationsnachricht | Eine Meldung mit Informationen, die für die Einstellung erforderlich sind. |
| 3 | Zurücksetzen | Eine Taste zum Zurücksetzen der Einstellungen. |
| 4 | Not-Aus | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 |
| 5 | Schutzstopp | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: SS1 SS2 |
| 6 | Verletzung der Gelenkwinkelbegrenzung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 7 | Verletzung der Gelenkgeschwindigkeitsbegrenzung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO (außer Serie H/P) SS1 SS2 |
| 8 | Verletzung der Gelenkdrehmomentbegrenzung | Nur STO ist verfügbar. |
| 9 | Kollisionserkennung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO (außer Serie H/P) SS1 SS2 RS1 |
| 10 | Verletzung der Positionsbegrenzung des TCP-Roboters | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO SS1 SS2 |
| 11 | Verletzung des Grenzwerts für die TCP-Ausrichtung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO (außer Serie H/P) SS1 SS2 |
| 12 | Verletzung des TCP-Geschwindigkeitslimits | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO (außer Serie H/P) SS1 SS2 |
| 13 | TCP Force Limit Verletzung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO (außer Serie H/P) SS1 SS2 |
| 14 | Verletzung Der Momentum | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO (außer Serie H/P) SS1 SS2 |
| 15 | Mechanische Grenzverletzung | Für das entsprechende Element kann ein Sicherheitsstopp ausgewählt werden. Das Dropdown-Menü enthält Folgendes: STO (außer Serie H/P) SS1 SS2 |
| 16 | Speichern | Mit dieser Schaltfläche können Sie die Einstellungswerte speichern. |
Hinweis
In der Informationsmeldung erscheint das folgende Popup: