
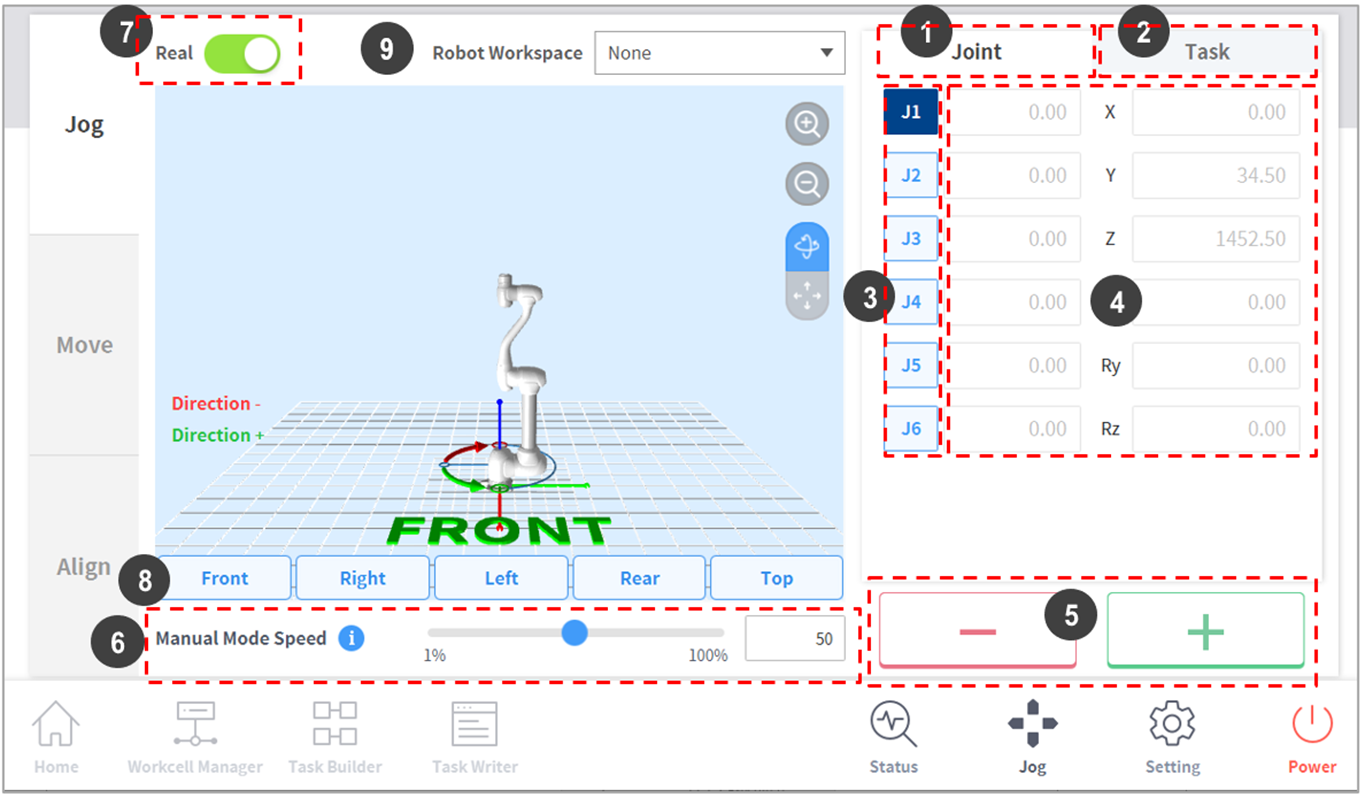
点动屏幕
可以根据 Jog(点动)屏幕中机器人的当前位置进行导航。
编号 | 项 | 说明 |
|---|---|---|
1 | Joint | 为关节配置点动模式的参考坐标。 |
2 | Task | 为任务配置点动模式的参考坐标。 |
3 | Select Axis | 选择要在点动模式下移动的轴。
|
4 | Coordinate Display | 显示当前在点动模式下运行的机器人的坐标。如果通过按向按钮改变机器人位置,坐标也会改变。 |
5 | Direction | 在选定的轴上沿 + 或 - 方向移动机器人。 |
6 | Manual Mode Speed | 配置手动模式下机器人的移动速度。可以通过拖动滑动条指针来调整速度。 如果滑动条指针为 100%,则 Jog(点动)选项卡上的相应最大关节速度为 30°/s,最大任务速度为 250 mm/s。该速度会影响到点动和运动按钮控制的速度。 |
7 | Real Mode | 配置是否在点动模式下以实时模式操作机器人。
|
8 | Simulator Alignment | 选择模拟器中显示的机器人的对齐方向。按下各方向按钮时,将沿相应方向对齐机器人。 |
9 | Robot Workspace | 在点动模拟器中显示已在 Workcell Manager 中注册的机器人作业空间信息。按下下拉菜单以选择要显示的作业空间。 |


笔记
- TCP 速度限值:根据安全政策,在点动和运动按钮操作期间的最高操作速度限制为 250 mm/s。
- 若机器人因达到关节限值而停止,或者在通过点动模式移动机器人时检测到碰撞,则设置安全恢复模式并将机器人移动至关节角度限值范围内的位置。有关安全恢复模式的更多信息,请参见“ 安全恢复模式”。