Siga o exemplo do comando Force
OPTIONAL NORMAL 20 MIN

Este exemplo foi escrito em Task Writer. Pode seguir este exemplo da mesma forma no Task Builder.
Cuidado
Certifique-se(2.11.0.1_temp-pt_PT) Precauções de utilização de que verifica antes de iniciar o exemplo. (2.11.0.1_temp-pt_PT) PART 1. Manual de segurançaConsulte para obter mais informações.
Este exemplo(2.12-pt_PT) Siga o exemplo do Comando de Conformidaderequer um arquivo do gravador de tarefas criado no .
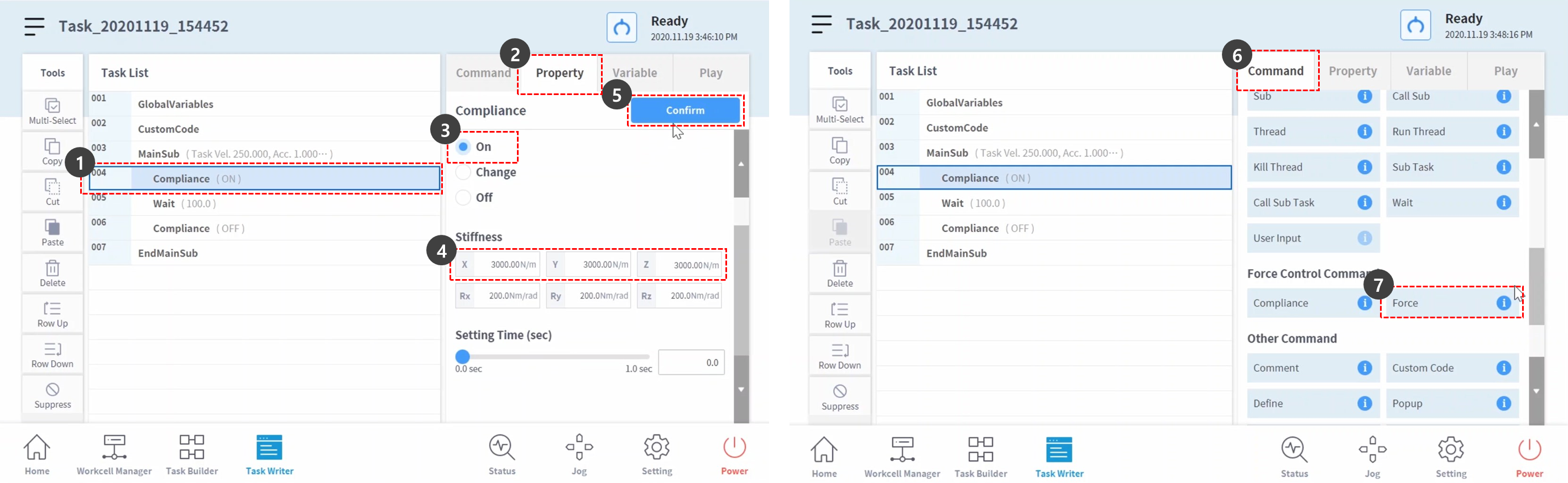
(2.12-pt_PT) Siga o exemplo do Comando de Conformidade Abra o arquivo do gravador de tarefas que você criou e selecione o comando Compliance na linha 4 da lista de tarefas.
Selecione a guia Propriedades.
Defina o modo para: O modo LIGADO ativa o controlo de conformidade. Os comandos de força não estão disponíveis até que o controle de conformidade esteja ativado.
Mode : On
Defina a rigidez para o valor predefinido:
X, Y, Z : 3000 N/m (default)
Rx, Ry, Rz : 200 Nm/rad (default)
Prima o botão de confirmação.
Selecione o separador Command (Comando).
Adicione o comando Forçar. Este comando será utilizado para ativar o controlo de força.
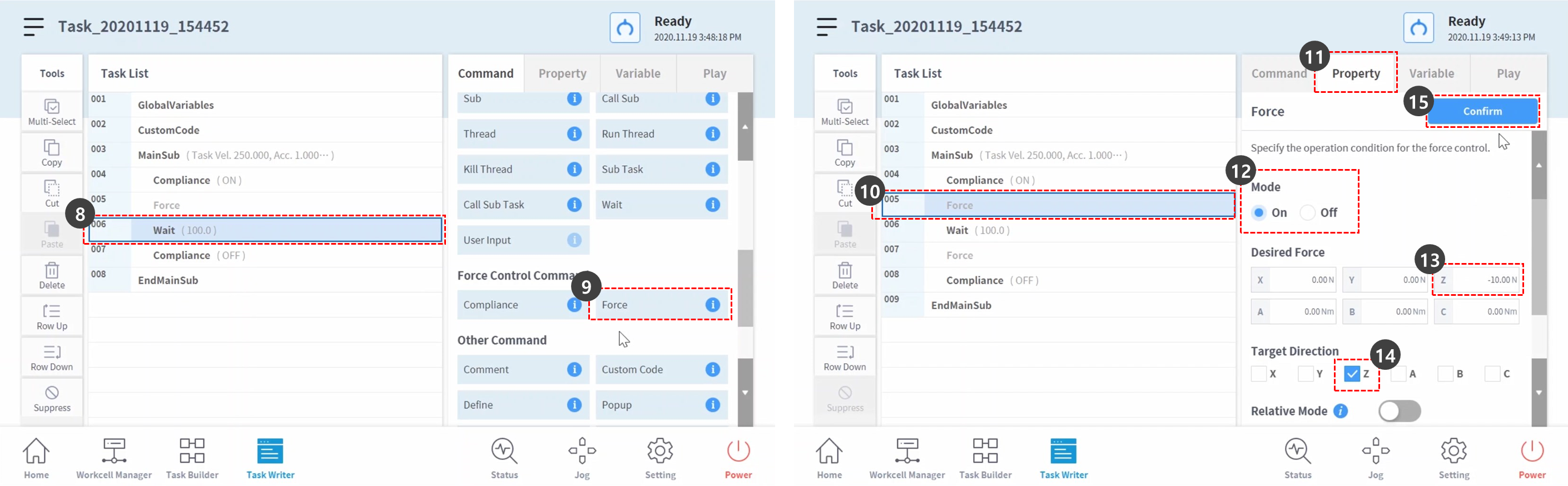
Selecione a linha 6 na lista de tarefas.
Adicione o comando Forçar. Este comando será usado para desativar o Force Control.
Selecione o comando Forçar na linha 5 na lista de tarefas.
Selecione a guia Propriedades.
Defina o modo para: O modo LIGADO ativa o controlo de força.
Mode : On
Defina a força pretendida da seguinte forma:
X : 0 N (default)
Y : 0 N (default)
Z : -10 N
Rx, Ry, Rz : 200 Nm/rad (default)
Verifique apenas o eixo z na direção do alvo.
Prima o botão de confirmação.
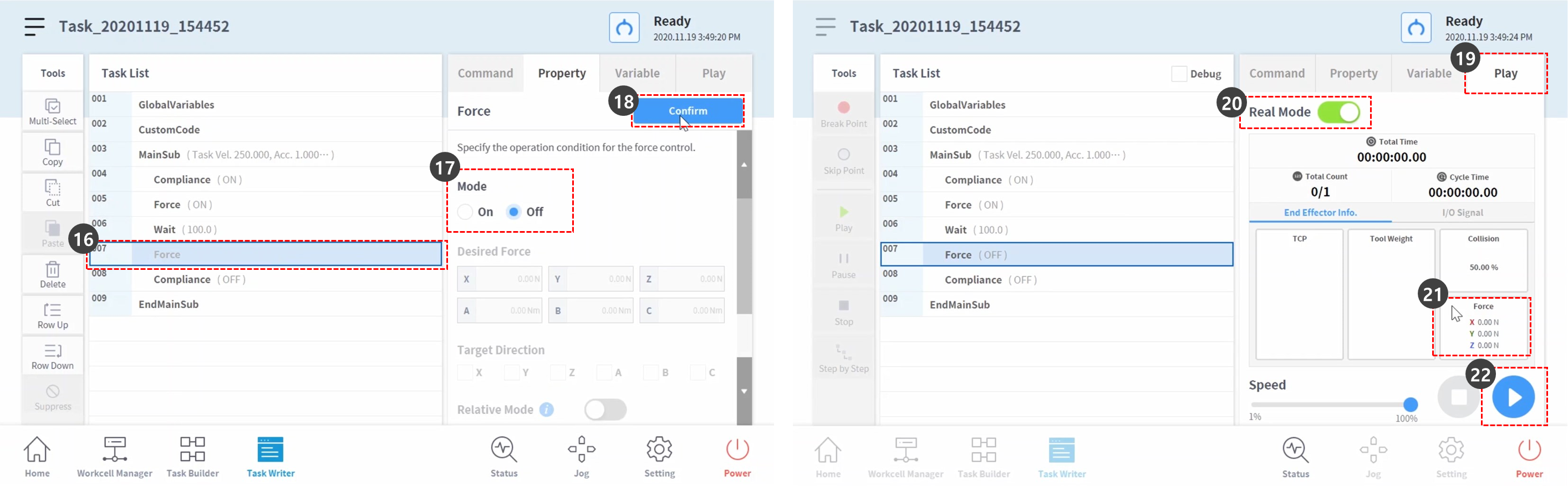
Selecione o comando Forçar na linha 7 na lista de tarefas.
Defina o modo para: Mode Off (Modo desligado) desativa o controlo de força.
Mode : Off
Prima o botão de confirmação.
Selecione a guia Reproduzir.
Ative o botão de alternância Modo Real.
Quando o botão de alternância está ativo, fica verde.
Verifique se o valor TCP Force para cada eixo é 0. Este valor de força é a quantidade de força externa que atualmente atua na ponta TCP do robô.
Prima o botão Run (Executar).
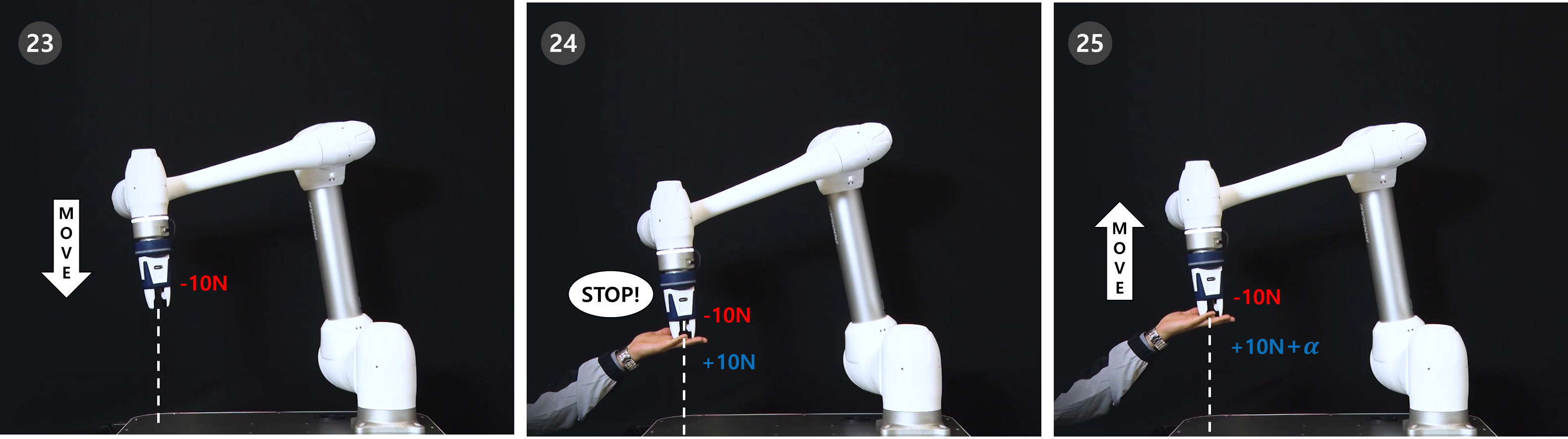
A ponta do robô TCP cria uma força de -10N, o que faz com que o robô se mova lentamente na direção -Z.
A extremidade do robot impede que o robot se desloque na direção Z, que é oposta à direção em que se move. Neste ponto, o robô permanecerá em posição como se fosse parado, desde que o robô esteja equilibrado entre as forças que está tentando mover e as forças que está tentando interferir.
Se for aplicada mais força ao robot do que 10 N, o robot move-se numa direção com a força aplicada.