Siga o exemplo do Comando de Conformidade
OPTIONAL NORMAL 20 MIN

Este exemplo foi escrito em Task Writer. Pode seguir este exemplo da mesma forma no Task Builder.
Cuidado
Certifique-se(2.11.0.1_temp-pt_PT) Precauções de utilização de que verifica antes de iniciar o exemplo. (2.11.0.1_temp-pt_PT) PART 1. Manual de segurançaConsulte para obter mais informações.
Saber
- Se houver um torque externo acima do limite ao ativar ou desativar o controle de conformidade, o robô interrompe o programa devido ao erro JTS (Joint Torque Sensor).
Threshold of JTS error (Nm) Model J1 J2 J3 J4 J5 J6 A0509 15 15 15 15 15 15 A0912 18 18 15 15 15 15 - As alterações de rigidez podem ser efetuadas independentemente da quantidade de binário externo.
- Durante o controle de conformidade, você não pode executar o movimento conjunto como o comando MoveJ.
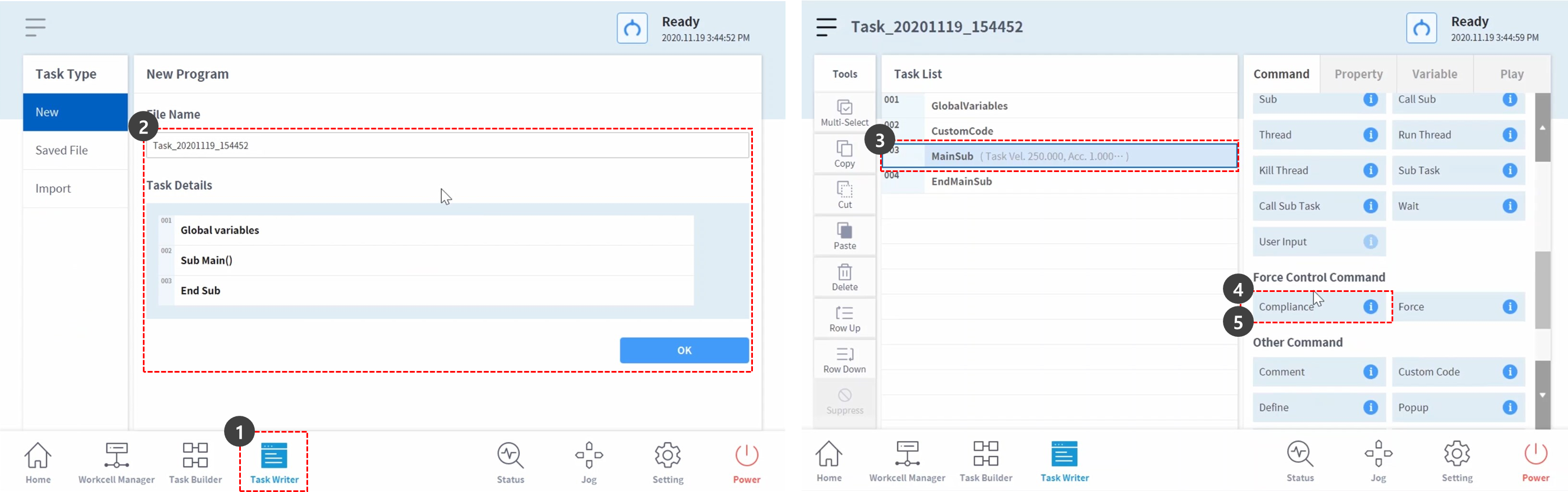
Selecione Task Writer (Escritor de tarefas) no menu inferior.
Especifique o nome da tarefa e prima o botão OK.
Selecione o comando MainSub na linha 3 da lista de tarefas. O novo comando é adicionado à linha seguinte da linha selecionada.
Adicione o comando Conformidade. Este comando será utilizado para ativar o Controlo de Conformidade.
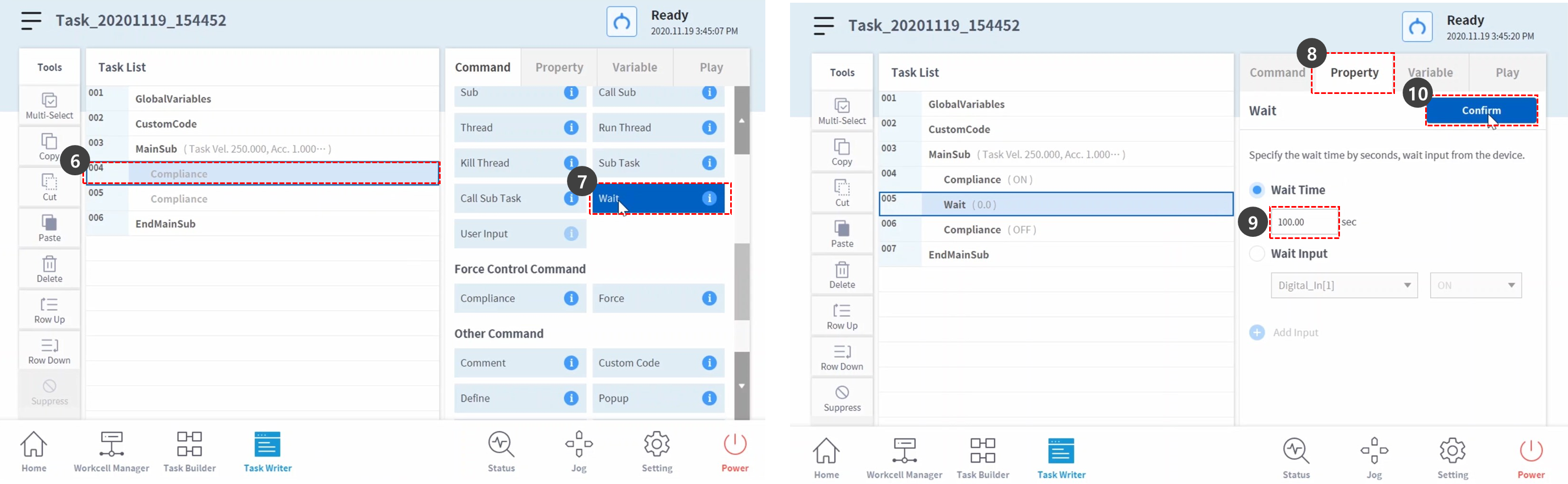
Adicionar mais um comando de conformidade. Este comando será utilizado para desativar o Controlo de Conformidade.
Selecione o comando Conformidade na linha 4. O novo comando é adicionado à linha seguinte da linha selecionada.
Adicionar o comando de espera.
Selecione a guia Propriedades.
Defina o tempo de espera da seguinte forma:
Wait Time : 100 sec
Prima o botão de confirmação.
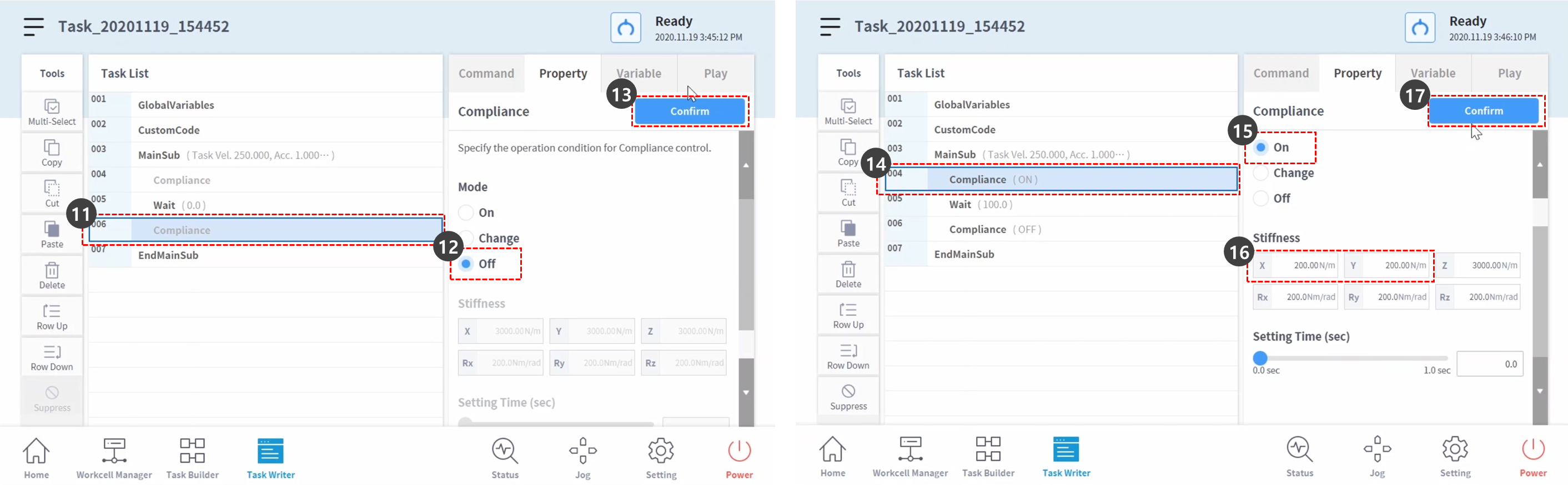
Selecione o comando Conformidade na linha 6.
Em Propriedade, defina Modo como: O modo desligado desativa o controlo de conformidade.
Mode : Off
Prima o botão de confirmação.
Selecione o comando Conformidade na linha 4.
Em Propriedade, defina Modo como: O modo LIGADO ativa o controlo de conformidade.
Mode : On
Defina a rigidez para: Diminuiremos a rigidez nas direções X e Y para reagir um pouco mais nas direções X e Y.
X : 200 N/m
Y : 200 N/m
Z : 3000 N/m (default)
Rx, Ry, Rz : 200 Nm/rad (default)
Prima o botão de confirmação.
Selecione a guia Reproduzir.
Ative o botão de alternância Modo Real.
Quando o botão de alternância está ativo, fica verde.
Neste exemplo, pararemos deliberadamente com uma paragem segura para explicar por que razão a sensibilidade de colisão deve ser reduzida ao utilizar o controlo de conformidade. A Sensibilidade de Colisão atualmente definida neste exemplo é 95%. Esta definição elevada de sensibilidade de colisão torna o robot muito sensível a colisões.
O robot pára em caso de colisão.
Prima o botão Run (Executar).
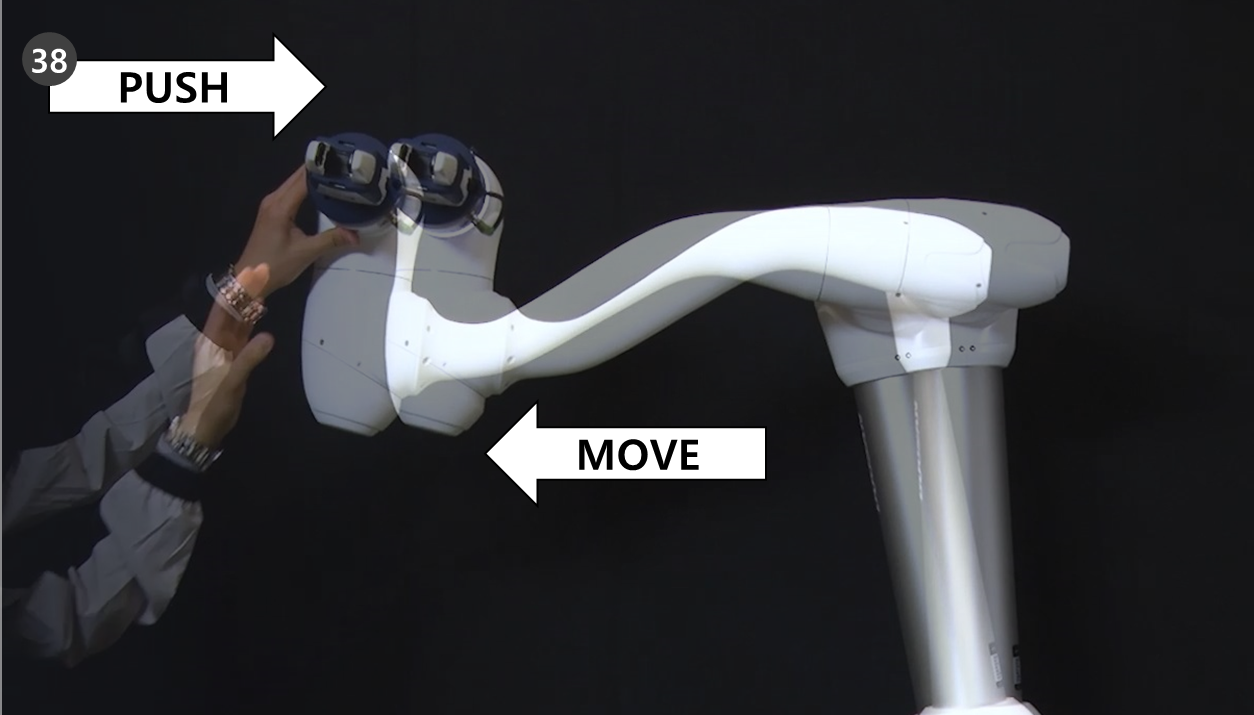
Agarre na extremidade do robot e tente empurrá-lo lentamente em direção ao corpo do robot. O robot pára com um erro de colisão. A cor do LED do robot ficará amarela durante uma paragem de segurança contra colisões.
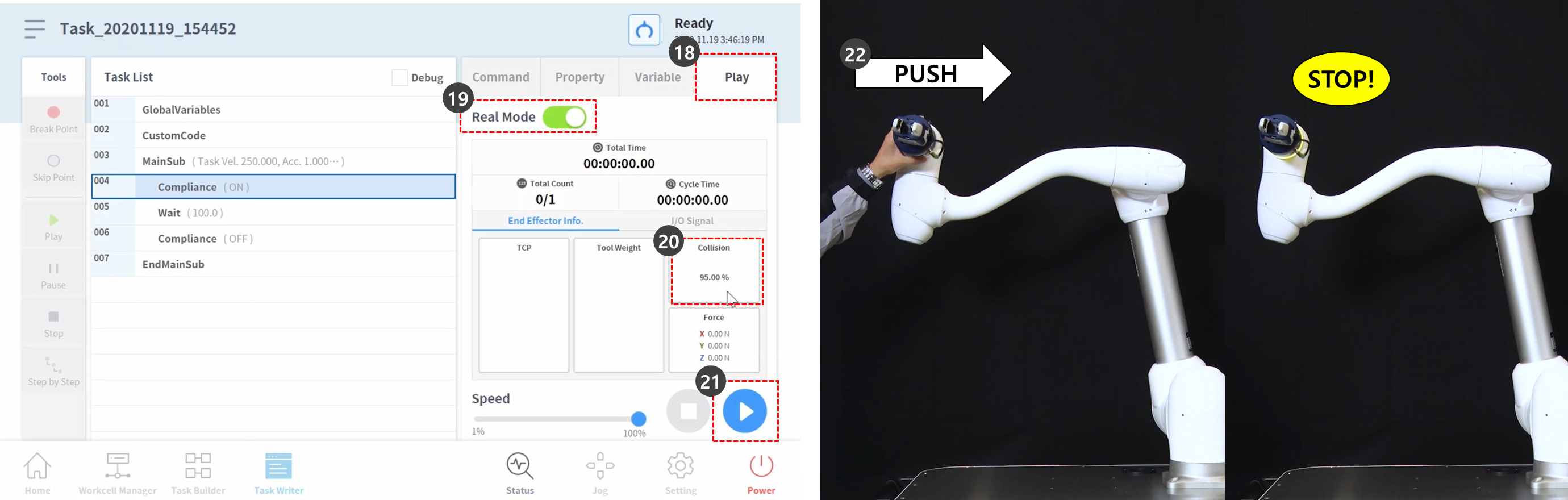
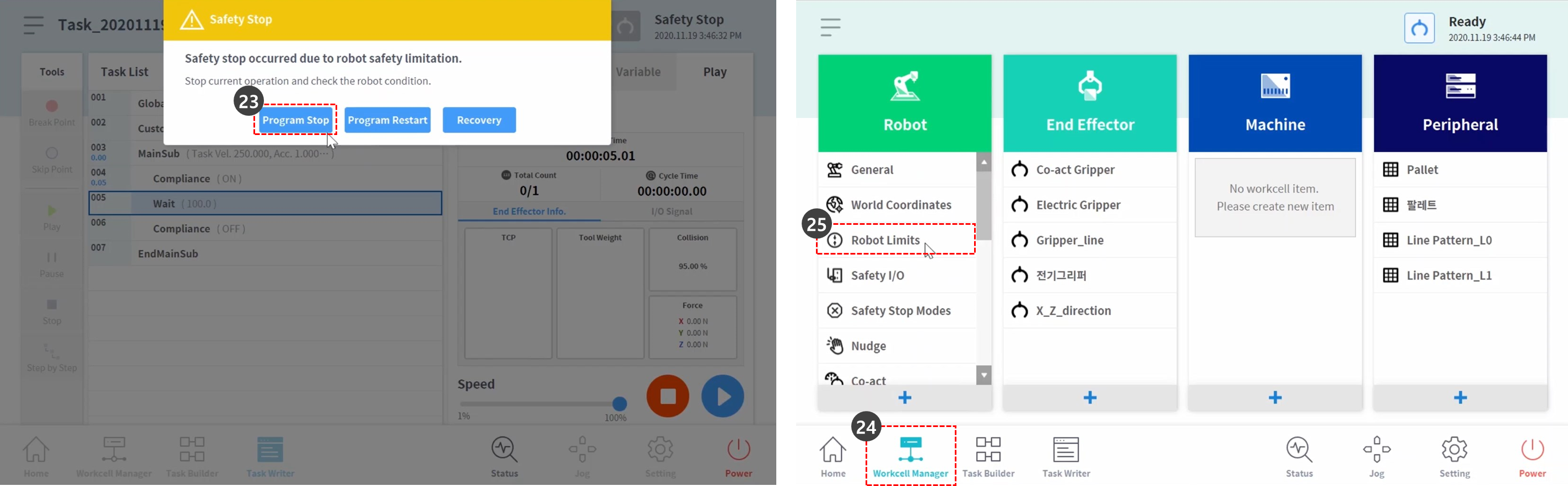
No ecrã, prima o botão Program Stop (Paragem de programa) na janela de aviso amarela de paragem de segurança. O programa de tarefas em execução é interrompido.
Selecione Workcell Manager (Gestor de células de trabalho) no menu inferior.
Selecione Robô > Limites do Robô.
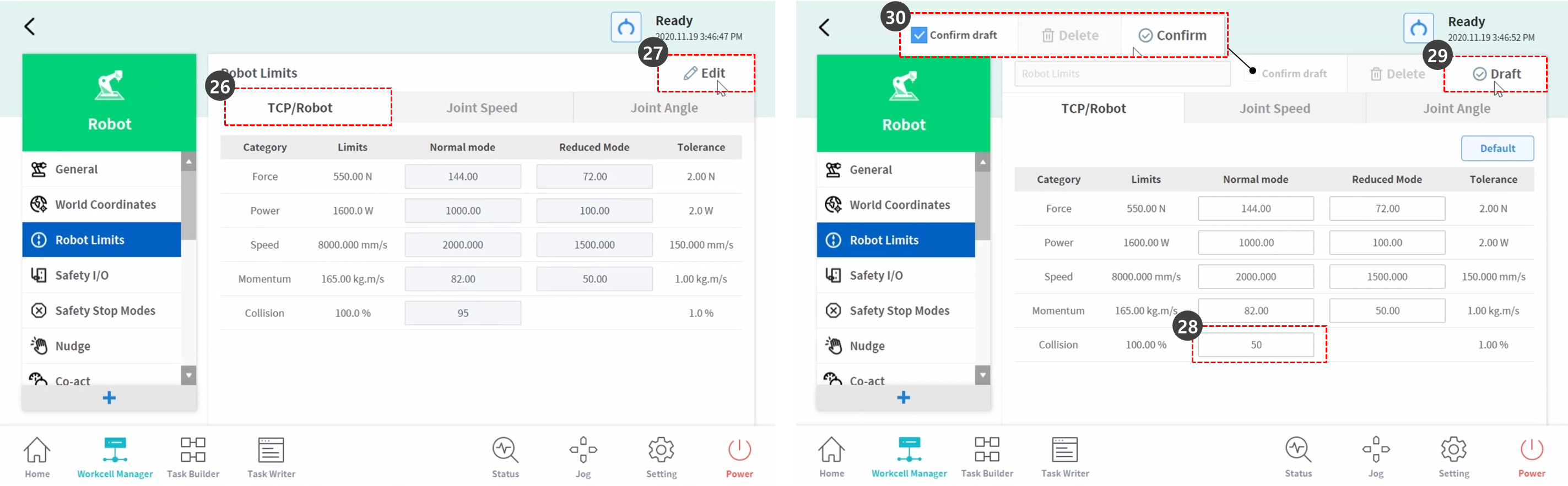
Selecione a guia TCP/Robot.
Pressione o botão Editar.
Altere a Sensibilidade de Colisão para:
Modo normal: 50%
Toque em Rascunho.
Marque a caixa de seleção Confirmar rascunho e clique no botão Confirmar.
Selecione Task Writer (Escritor de tarefas) no menu inferior.
Selecione o ficheiro guardado no lado esquerdo do ecrã.
Certifique-se de que o nome do ficheiro para a primeira tarefa é o nome da tarefa que especificou no passo 2 do processo e, em seguida, selecione-o. A última tarefa guardada é colocada no topo da lista de ficheiros do gravador de tarefas.
Prima o botão Open (Abrir).
Selecione a guia Reproduzir.
Ative o botão de alternância Modo Real.
Prima o botão Run (Executar).
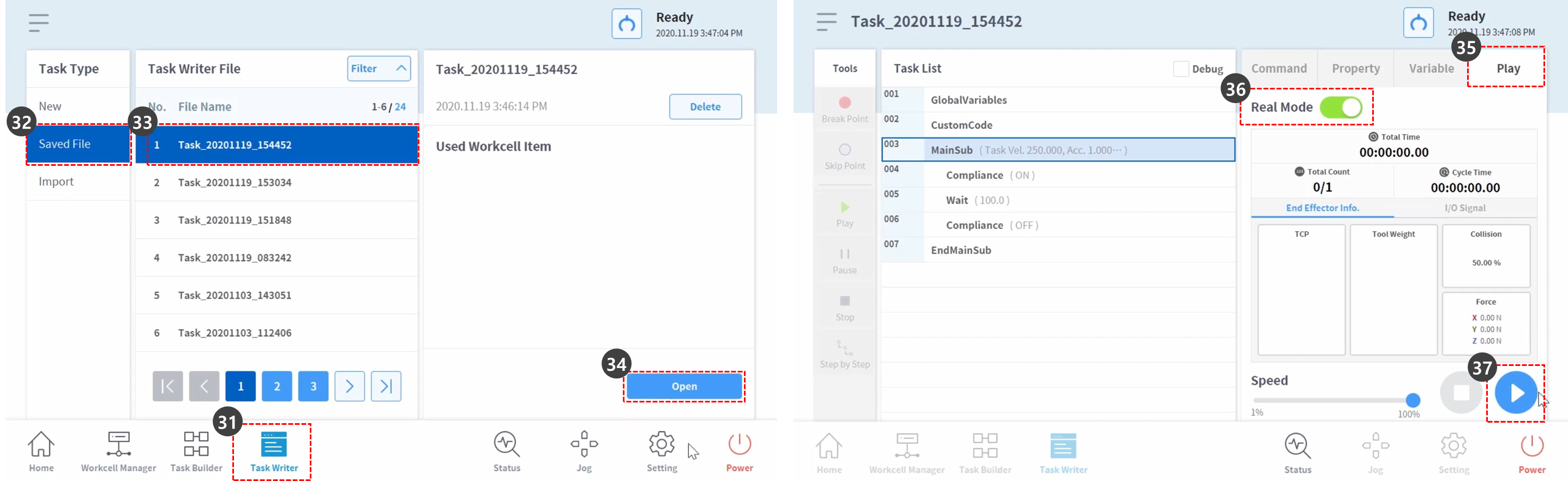
Agarre na extremidade do robot e tente empurrá-lo lentamente em direção ao corpo do robot. O robot desloca-se com a força do impulso e regressa à sua posição original.