
Cena em Jog
O ecrã Jog permite-lhe navegarcom base na posição atual do robot.
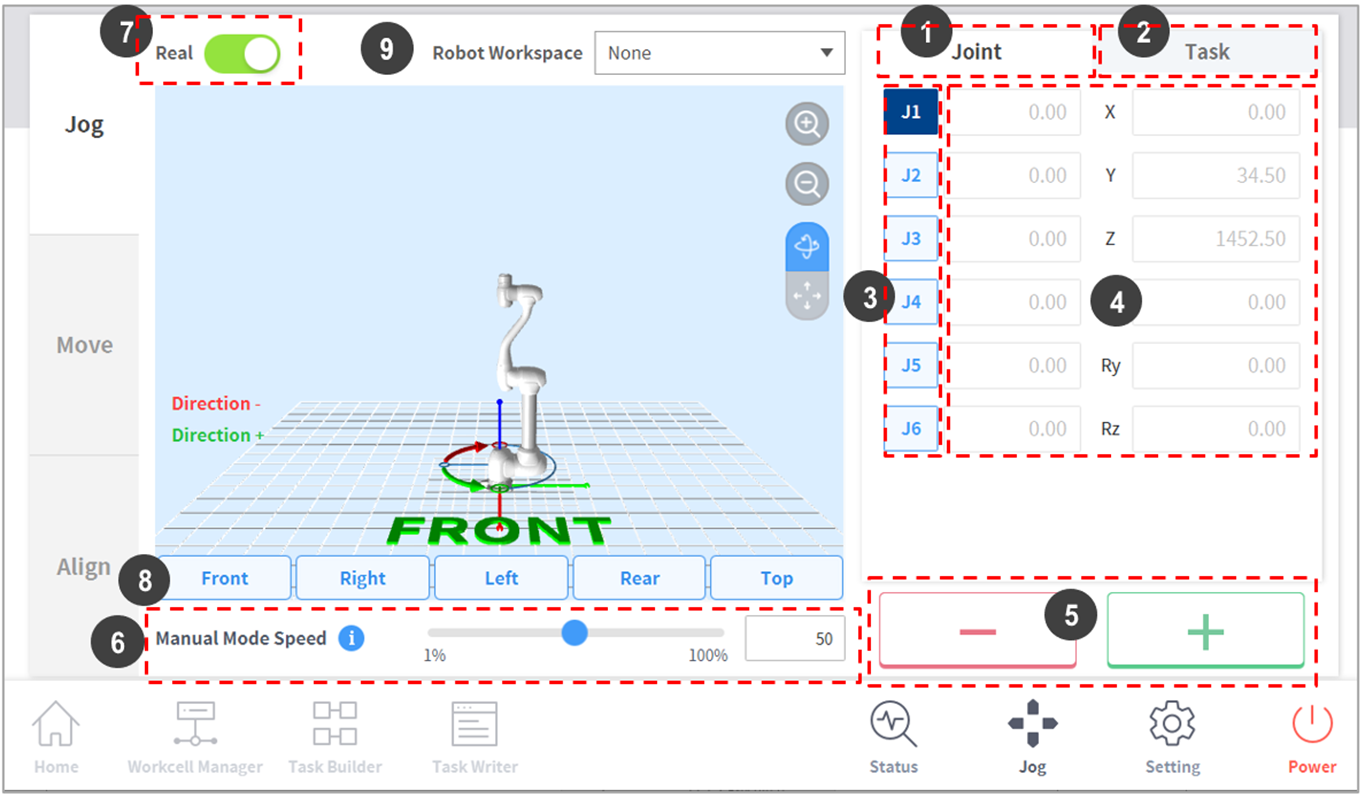
Número | Item | Descrição |
1 | Juntas | Defina a junta para as coordenadas de referência do modo de Jog. |
2 | Tarefas | Defina a tarefa para as coordenadas de referência para o modo de Jog. |
3 | Selecione Axis (Eixo) | Selecione o eixo para se deslocar para o modo de Jog.
|
4 | Apresentar coordenadas | São apresentadas as coordenadasda posição do robot atualmente no modo de Jog. Se a posição do robot for alterada premindo os botões de direção, os valores das coordenadas também serão alterados. |
5 | Orientação | Move o robot na direção ascendente ou ascendente no eixo selecionado. |
6 | Velocidade do modo manual | Define a velocidade do movimento do robô no modo manual. Arraste o ponteiro do cursorpara ajustar a velocidade. Se o ponteiro do cursor for 100%, a velocidade máxima para a junta correspondente é de 30 graus/s no separador Jog e a velocidade máxima para a tarefa é de 250 mm/s. Esta velocidade afeta apenas a velocidadea que os botões de movimento e de movimento manobre o robot. |
7 | Modo real | Define se o robot atual irá funcionar quando utilizar o modo de Jog.
|
8 | Alinhando o Simulador | Selecione a direção de alinhamento para o robot apresentado no simulador. Prima cada botão direcionalpara alinhar o robot na direção adequada. |
9 | Espaço de trabalho do robô | Apresenta as informações da área de trabalho do robô registadas com o gestor de células de trabalho no simulador Jog. Clique no menu pendentepara selecionar a área de trabalho que pretende apresentar. |


Saber
- Limitação da taxa TCP: A política de segurançalimita a velocidade máxima para 250 mm/sao utilizar os botões de movimento e de movimento.
- Se o robot estiver a deslocar-se para o modo de Jog e for excedido um limite de junta ou for detetada uma colisão e o robot parar, entre no modo de recuperação segurapara mover o robot para o posicionar dentro do limite do ângulo de articulação. Consulte para obter uma descriçãoUsando o Modo de recuperação segurado Modo de recuperação segura.