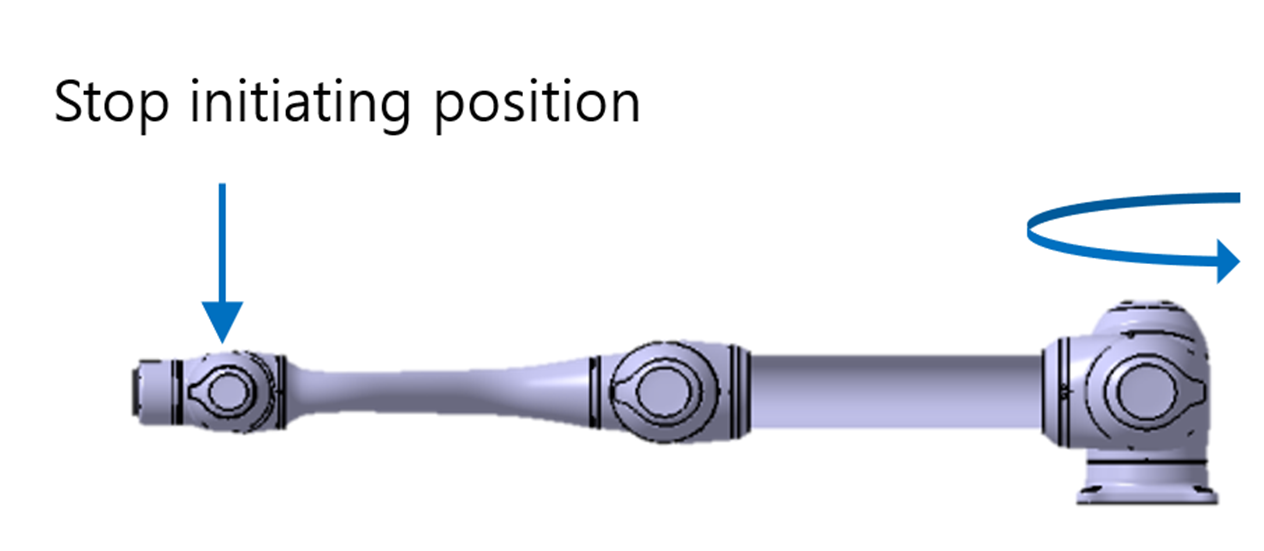
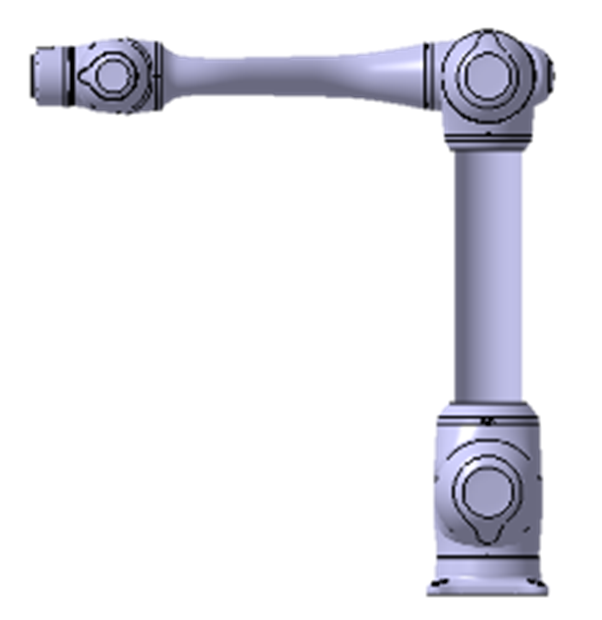
As medidas da articulação 1 foram realizadas durante o movimento horizontal com o eixo de rotação perpendicular ao solo.
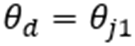
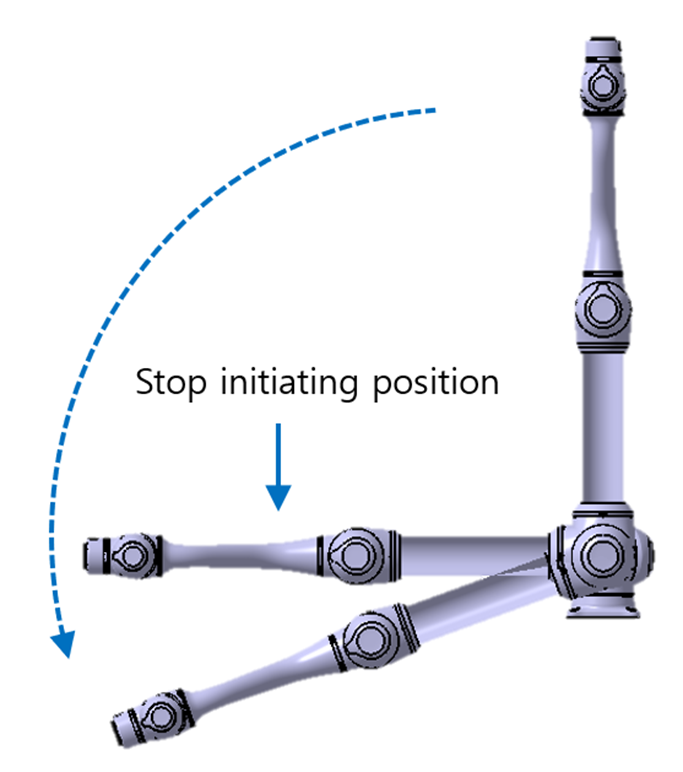
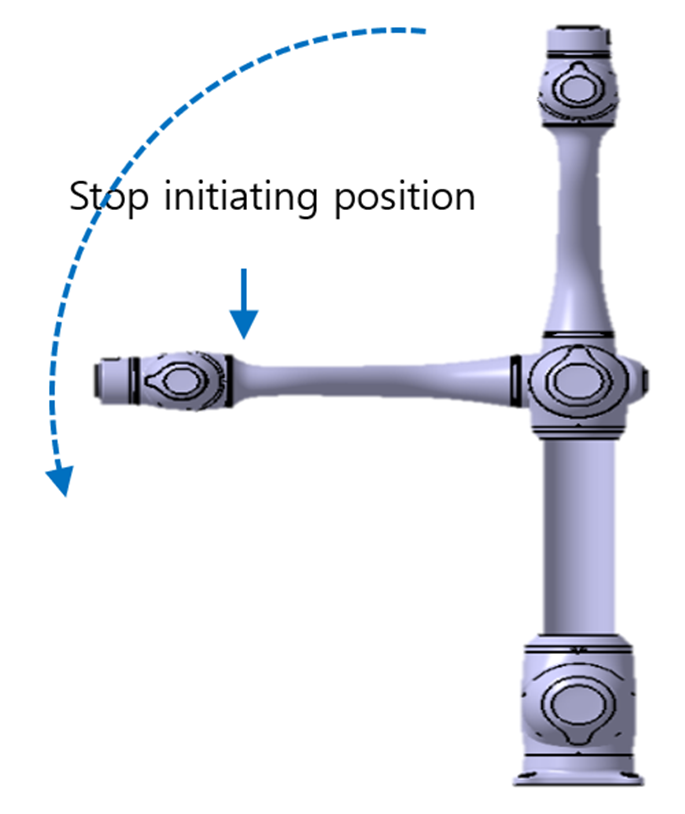
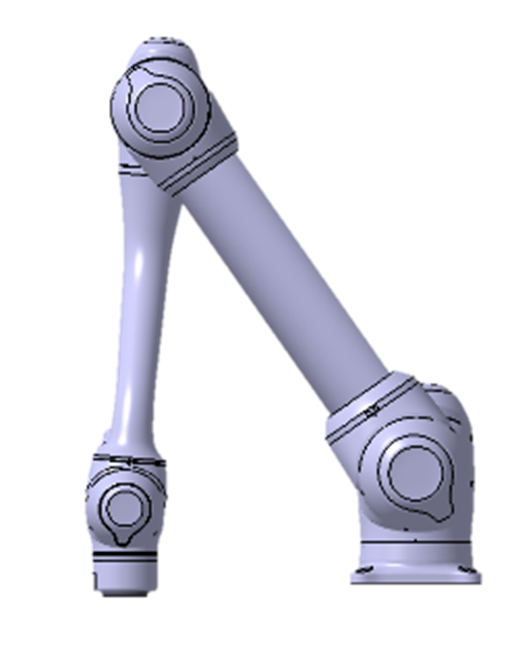
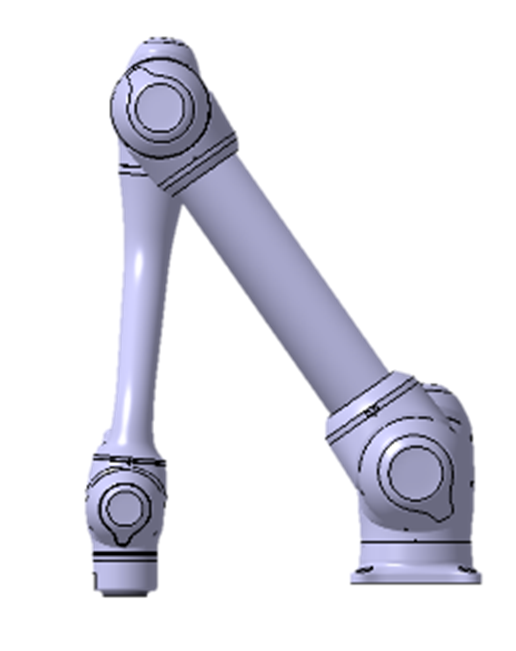
As medidas da articulação 2 e da articulação 3 foram feitas parando-se o robô movendo-se para baixo o caminho perpendicularao solo com o eixo rotacional paralelo ao solo.
Estas medições são efetuadas nas piores condições possíveis. Pode variar consoante as condições de medição.
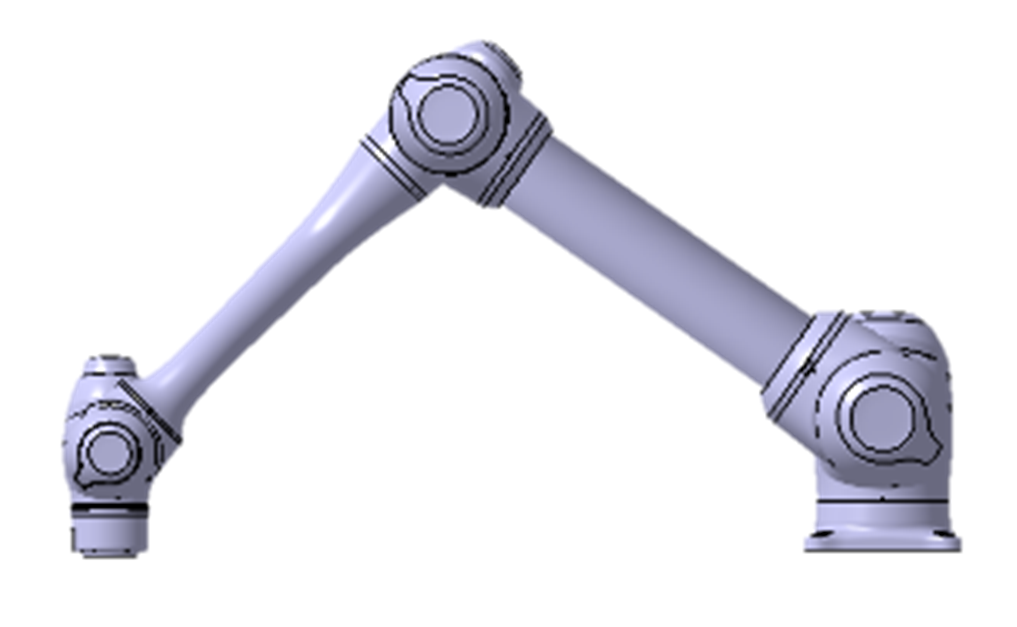
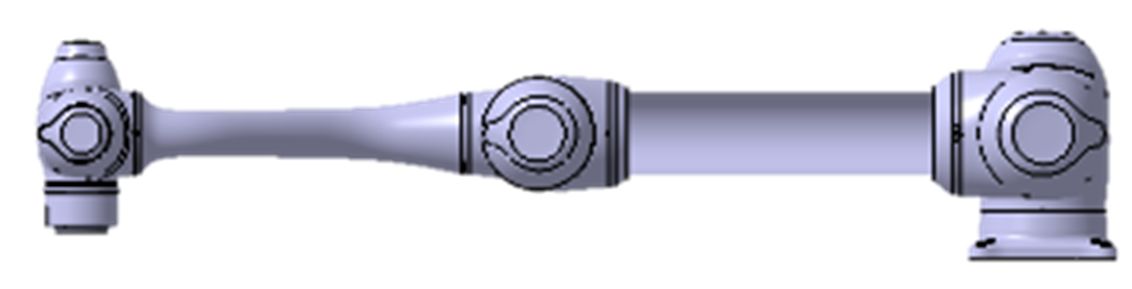
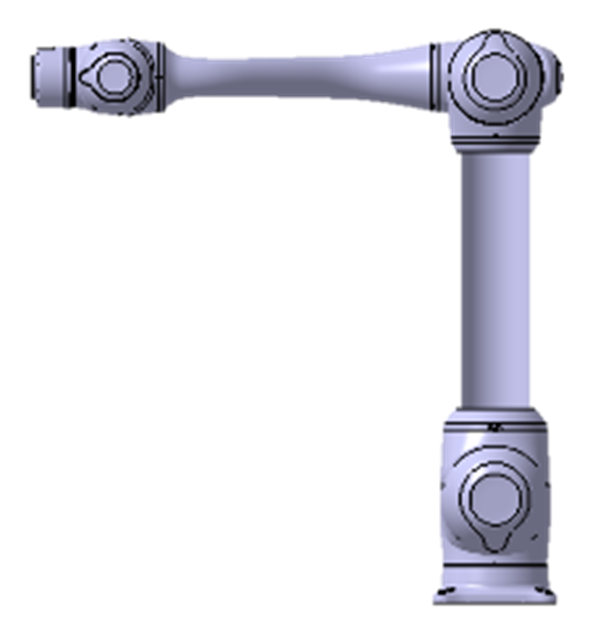
The pose for 33%, 66%, and 100% of extension
|
|
Joint 1 |
Joint 2 |
Joint 3 |
|
100% extension Stop category 0 |
|
|
|
|
33% extension Stop category 1 |
|
|
- |
|
66% extension Stop category 1 |
|
|
- |
|
100% extension Stop category 1 |
|
|
|
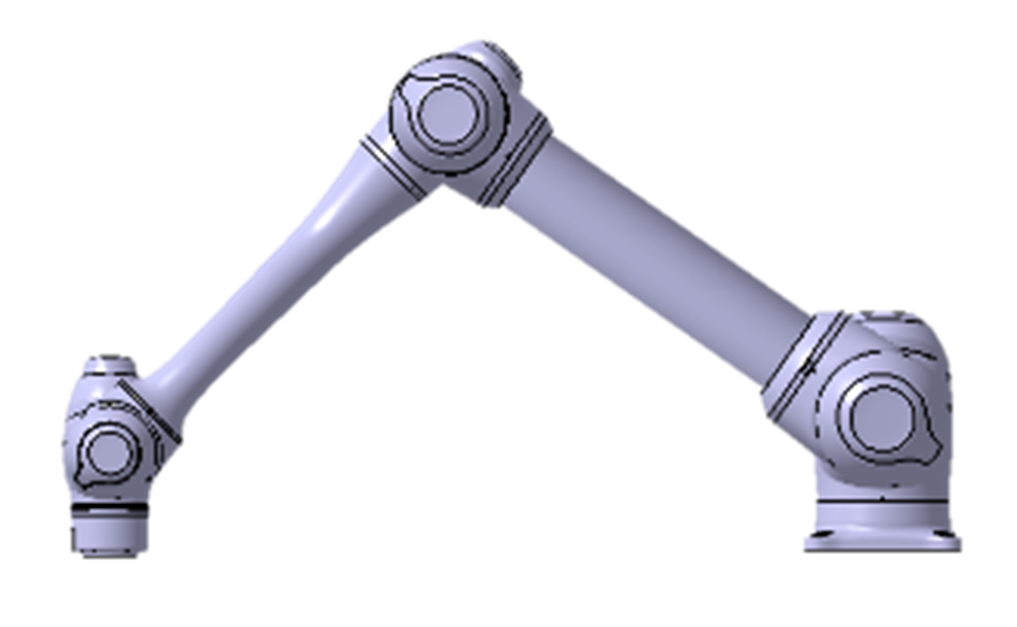

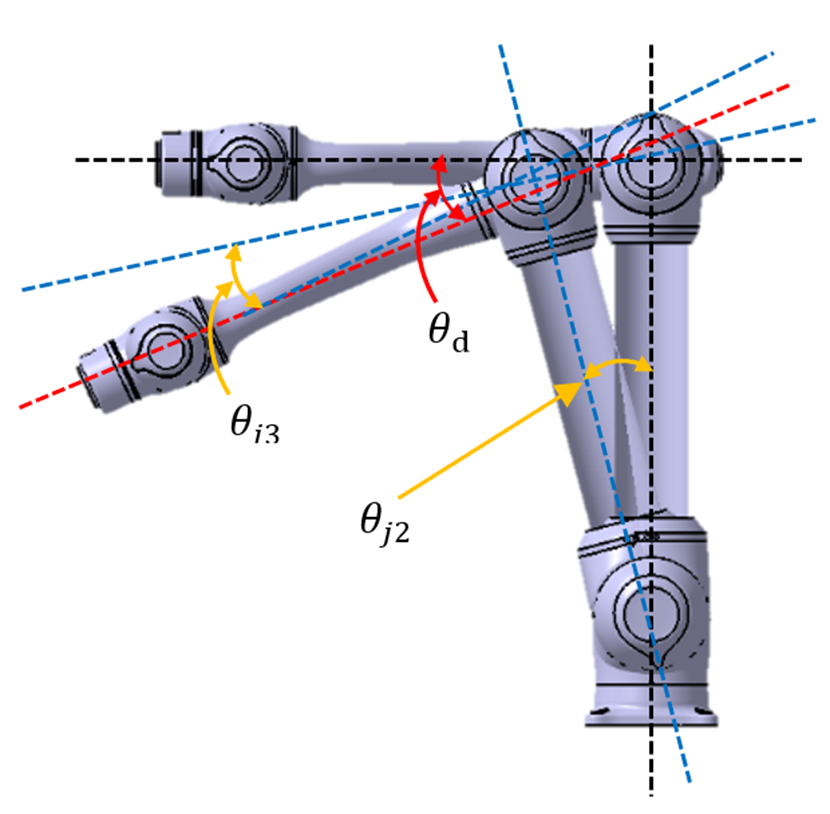
The pose when the stop is initiated and the measured angle (  )
)
|
|
Pose when the stop is initiated |
Measured Angle |
|
Joint1
|
|
No slip, |
|
Joint2 |
|
|
|
Joint3 |
|
|