Manipulador
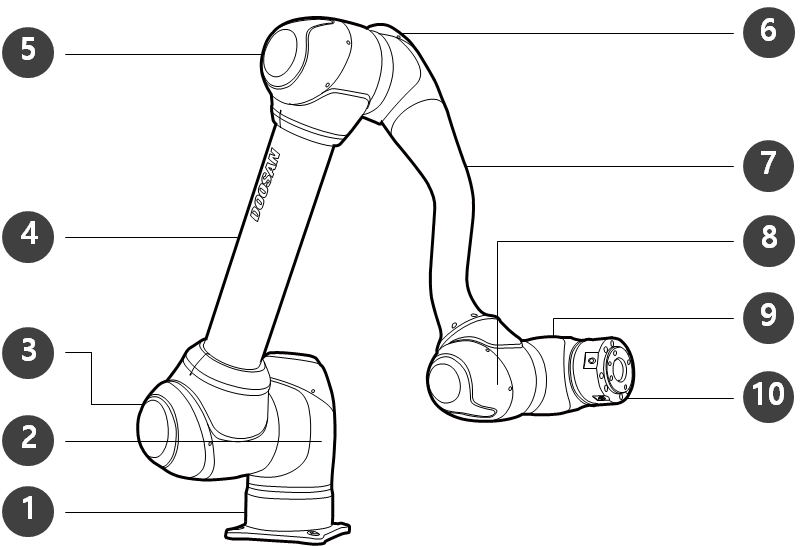
Nomes das peças
|
Não |
Nome |
Não |
Nome |
|---|---|---|---|
|
1 |
Base |
6 |
J4 |
|
2 |
J1 |
7 |
Link2 |
|
3 |
J2 |
8 |
J5 |
|
4 |
Ligação 1 |
9 |
J6 |
|
5 |
J3 |
10 |
Flange da ferramenta |
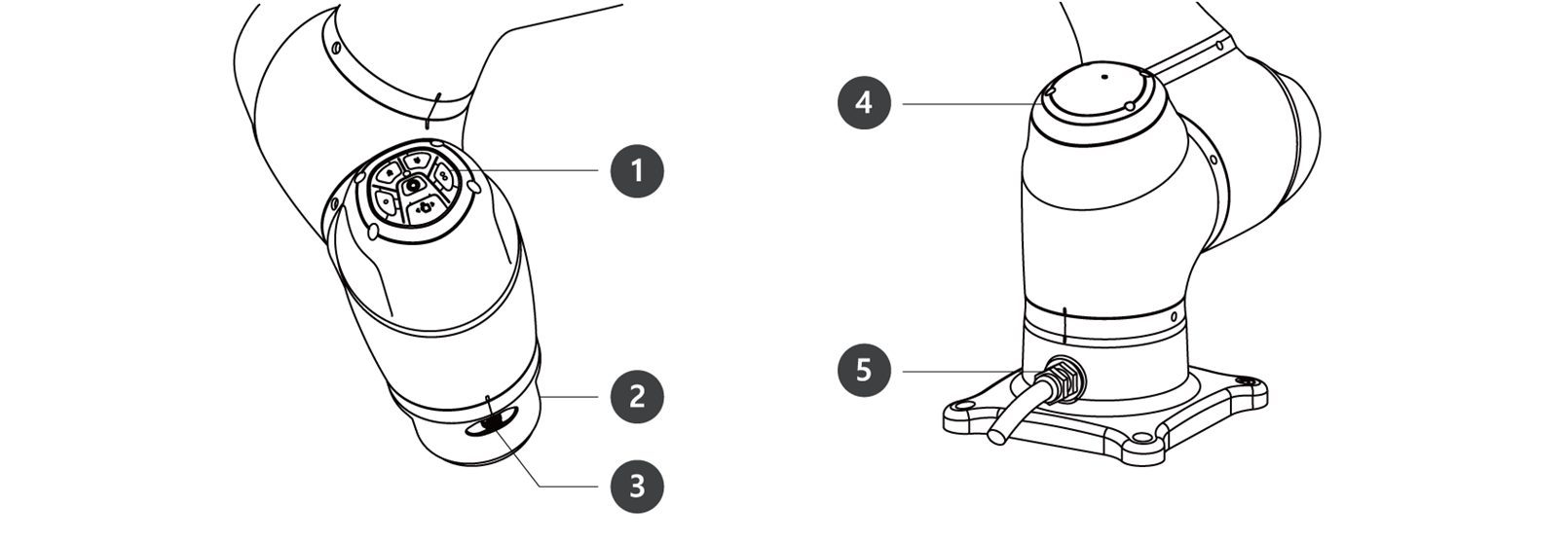
Principais caraterísticas
|
Não |
Item |
Descrição |
|---|---|---|
|
1 |
Cockpit |
[Opção] Controlador usado para ensino direto. |
|
2 |
Flange da ferramenta |
Área para instalar ferramentas. |
|
3 |
E/S da flange |
Porta de E/S para controlo de ferramentas.
|
|
4 |
LED (1 eixos) |
Apresenta o estado do robô com cores diferentes. Para obter mais informações sobre o status do robô, consulte " Status e cor do diodo emissor de luz da flange para cada modo." |
|
5 |
Conetor |
Usado para fornecer energia e comunicação do robô. |
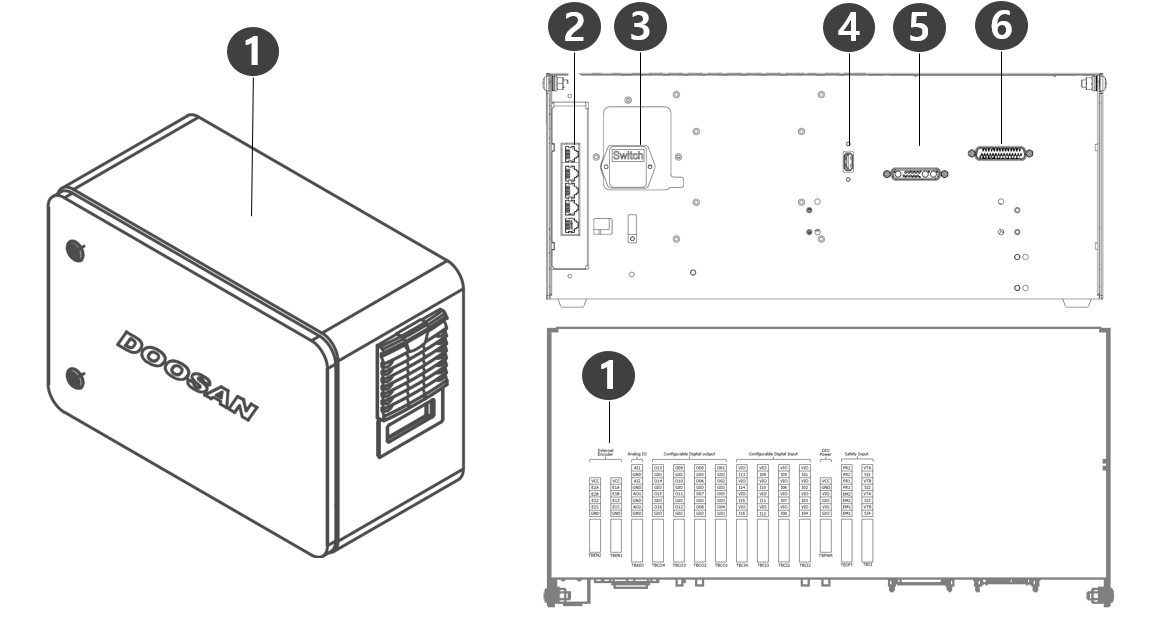
Controlador
|
Não |
Item |
Descrição |
|---|---|---|
|
1 |
Terminal de ligação de E/S (interno) |
Ele pode ser conetado com outros controladores ou periféricos de robôs. |
|
2 |
Terminal de ligação de rede |
Usado para conetar ao terminal de conexão de rede dentro do controlador para usar laptops, dispositivos TCP/IP e equipamentos Modbus. |
|
3 |
Terminal/interrutor da ligação de alimentação |
Utilizado para ligar ou desligar a alimentação elétrica do controlador. Para obter mais informações, consulte Ligar/desligar o sistema. |
|
4 |
Terminal de ligação USB |
Usado para armazenar logs criados enquanto o robô está operando no armazenamento USB ou exportar e importar tarefas. |
|
5 |
Terminal de ligação do cabo do manipulador |
Usado para conetar o cabo do manipulador ao controlador. |
|
6 |
Terminal de conexão do cabo pendente Ensine |
Usado para conetar o cabo pendente de ensino ao controlador. |
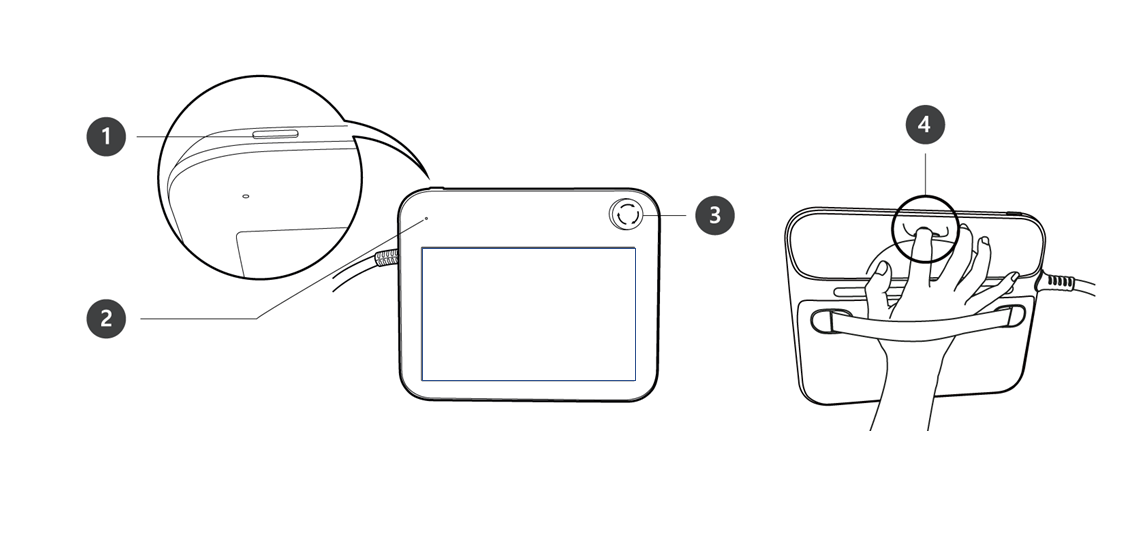
Ensine o pendente
|
Não |
Item |
Descrição |
|---|---|---|
|
1 |
Botão de alimentação |
Usado para ligar/desligar a alimentação principal do pendente de ensino. Para obter mais informações, consulte Ligar/desligar o sistema. |
|
2 |
LED de alimentação |
Liga-se quando a alimentação é fornecida. |
|
3 |
Botão de paragem de emergência |
Em caso de emergência, prima o botão para parar o funcionamento do robô. |
|
4 |
Botão de orientação manual |
Prima e mantenha premido o botão para mover o robot livremente para uma posição pretendida. |
-
Se o pendente Teach precisa ser protegido e montado durante a operação, a tampa macia fornecida por nós torna mais seguro e fácil de usar.