
Ustawianie współrzędnych Świata współrzędnych odniesienia do przeniesienia
Aby przenieść robota na podstawie współrzędnych świata, wykonaj następujące czynności:
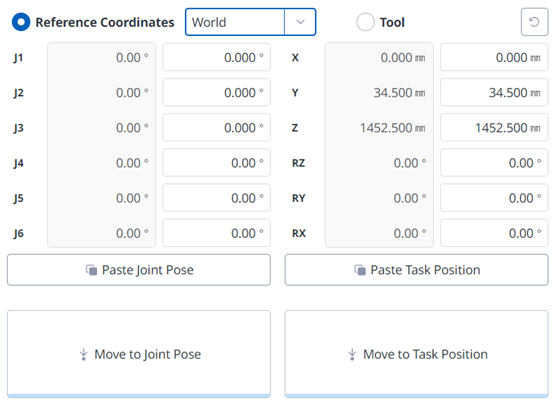
- Wybierz kartę Przesuń i Współrzędne odniesienia.
- Wybierz Świat jako współrzędne wyświetlania i wybierz kartę Świat.
- Skonfiguruj pozycję do poruszania się w odniesieniu do współrzędnych Świata.
- Dotknij i przytrzymaj przycisk Przenieś do odpowiedniej pozycji, aby przejść do ustawionych współrzędnych.