
Obsługa ręczna — dowiedz się, jak korzystać z funkcji JOG
OBOWIĄZKOWE NORMALNY 15 MIN
Użytkownik może wybrać ręczną metodę przemieszczania z karty Uskok. Aby uzyskać więcej informacji na temat uskoku/przesunięcia/wyrównania, patrz Funkcja impulsowania.
- Uskok: It przenosi połączenie robota lub TCP do osi połączenia lub osi współrzędnych wybranej przez użytkownika
- Przenieś: It przenosi połączenie robota lub TCP do punktu docelowego wprowadził użytkownik
- Wyrównaj: It przenosi koniec robota do płaszczyzny prostopadłej do wybranej przez użytkownika płaszczyzny i osi współrzędnych równoległej do końca robota
Ruch robota składa się z dwóch typów.
- Ruch połączenia: It porusza każde połączenie liniowo z ruchem obrotowym
- Ruch zadania: T przenosi koniec liniowo do punktu docelowego
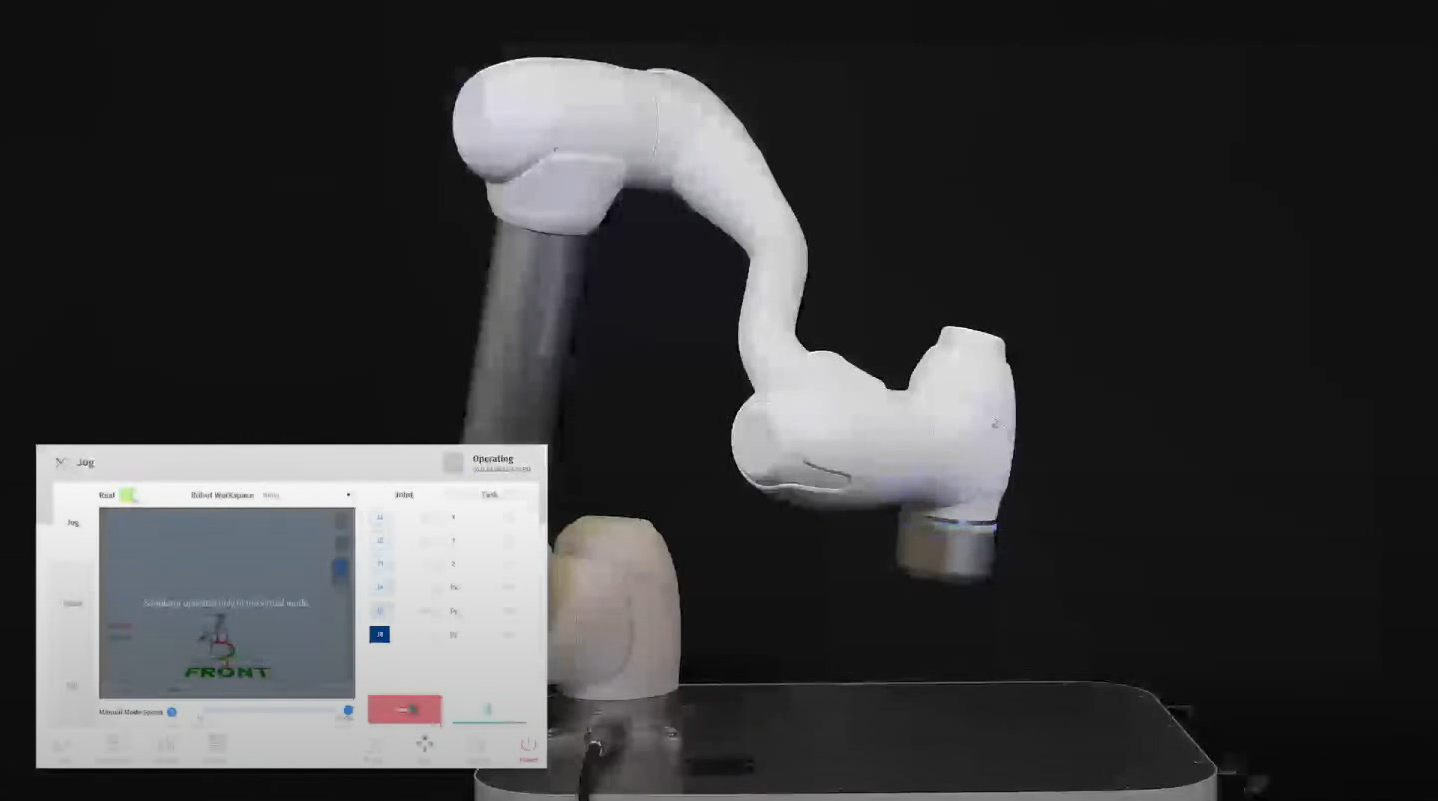
Poniżej przedstawiono sposób przemieszczania robota za pomocą ruchu połączenia z ekranu ruchu impulsowego:
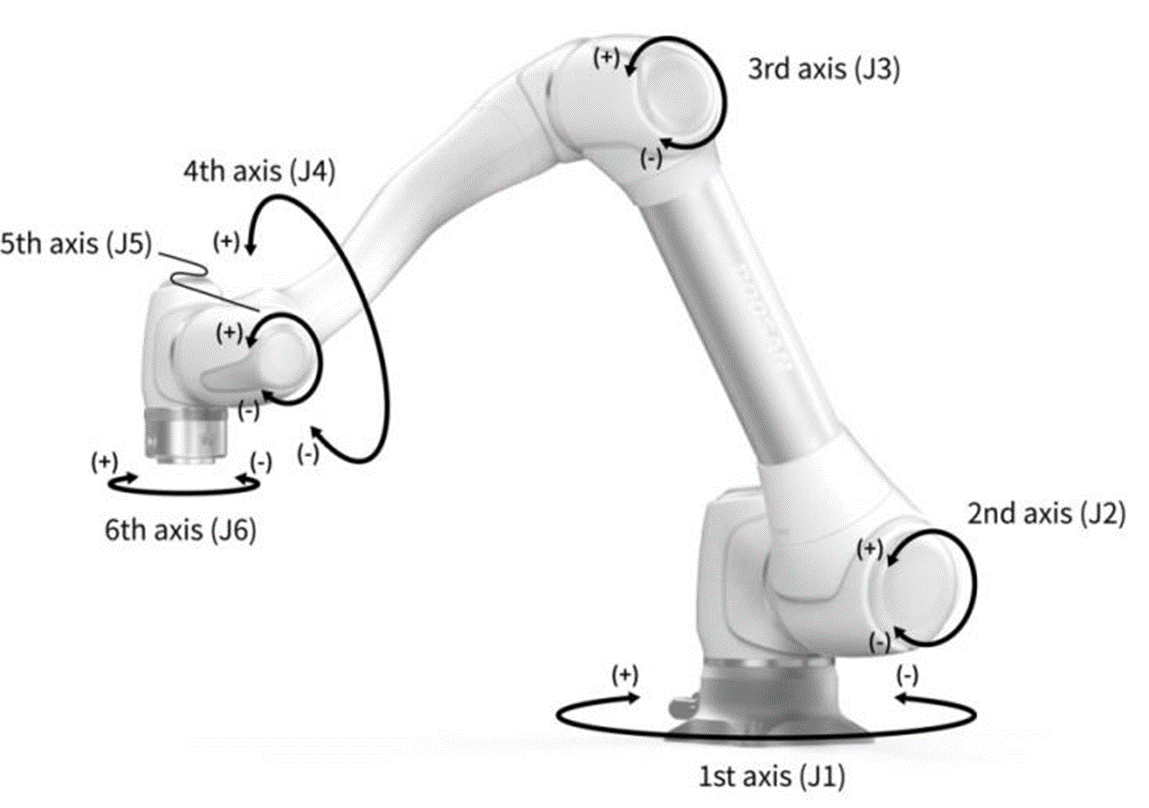
- Wybrać kartę połączenie.
- Wybrać oś do przeniesienia. Na przykład można wybrać opcję J1.
- Naciśnij przycisk +/-, aby przesunąć robota. Robot porusza się po naciśnięciu przycisku +/-, a bieżąca lokalizacja jest wyświetlana na ekranie w czasie rzeczywistym.
Poniżej przedstawiono sposób przemieszczania robota za pomocą ruchu zadania na ekranie uskoku:
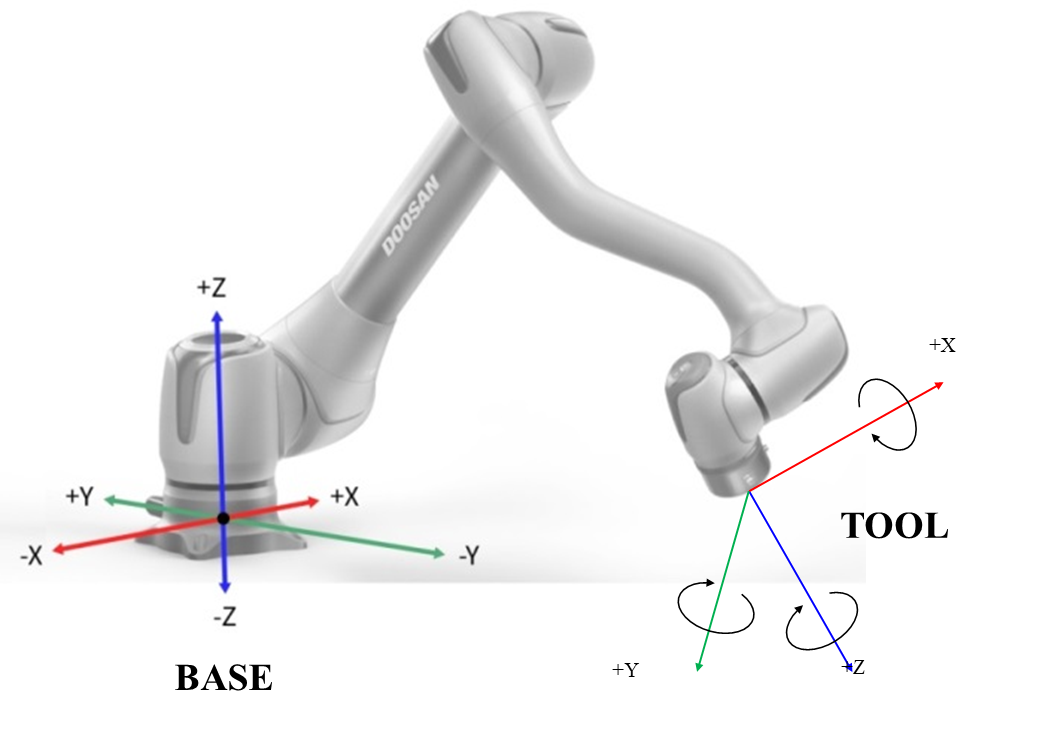
- Wybierz współrzędne bazy. Robot może być przesuwany zgodnie ze współrzędnymi BAZY lub WSPÓŁRZĘDNYMI NARZĘDZIA.
- Wybrać kierunek do przeniesienia. Na przykład można wybrać oś X.
- Naciśnij przycisk +/-, aby przesunąć robota. Robot porusza się po naciśnięciu przycisku +/-, a bieżąca lokalizacja jest wyświetlana na ekranie w czasie rzeczywistym.
Aby uzyskać więcej informacji na temat ruchu impulsowego, przesuwania i wyrównywania, patrz Ekran impulsowaniaodpowiednio , Ekran ruchu i Ekran Wyrównaj .
Uwaga
- Jeśli przełącznik dwustabilny trybu rzeczywistego w lewym górnym rogu ekranu uskoku jest wyłączony, robot porusza się tylko na wirtualnym ekranie po lewej stronie ekranu uskoku. Rzeczywisty robot porusza się, jeśli przełącznik trybu rzeczywistego jest włączony.