
Ekran ruchu
Ruchy robota mogą być wykonywane zgodnie z docelowym kątem/współrzędnymi na ekranie Move. Jeśli współrzędne, do których robot musi wykonać ruch są znane, lub jeśli robot musi wykonać ruch w górę do współrzędnych wyrażonych w ułamkach dziesiętnych, wykonanie ruchu przez robota jest możliwe po określeniu współrzędnych.
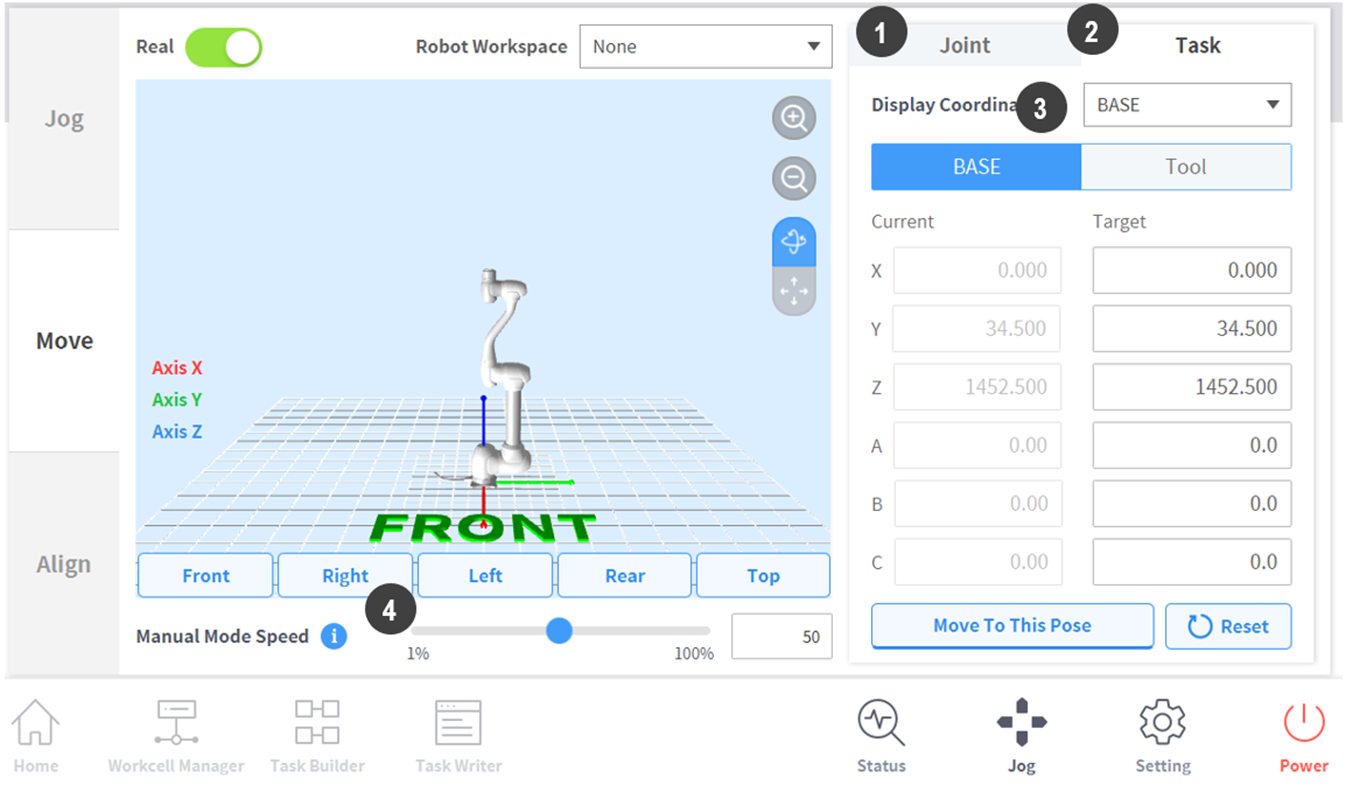
Lp | Element | Opis |
|---|---|---|
1 | Joint | Służy do konfiguracji współrzędnej odniesienia do użycia podczas poruszania robotem za pomocą impulsowania. |
2 | Task | Służy do konfiguracji kąta odniesienia do użycia podczas poruszania robotem za pomocą impulsowania. |
3 | Reference Point Setting | Służy do konfiguracji punktu odniesienia w celu wyrównania współrzędnej zadania. Base: Służy do konfigurowania współrzędnej zadania na bazie podstawy robota. World: Służy do ustawiania współrzędnych zadania na bazie ustawionych współrzędnych globalnych. Tool: Służy do ustawiania współrzędnej zadania na podstawie narzędzia zainstalowanego na końcu sześciu osi robota. |
4 | Manual Mode Speed | Służy do konfiguracji prędkości ruchu robota w trybie ręcznym. Prędkość można regulować przez przeciągnięcie wskaźnika na suwaku. Jeśli wskaźnik na suwaku znajduje się w pozycji 100%, odpowiadająca maksymalna prędkość przegubu w karcie Move wynosi 30 deg/s, a maksymalna prędkość zadania wynosi 250 mm/s. Prędkość ta wpływa na prędkość impulsowania i działania przycisku. |