
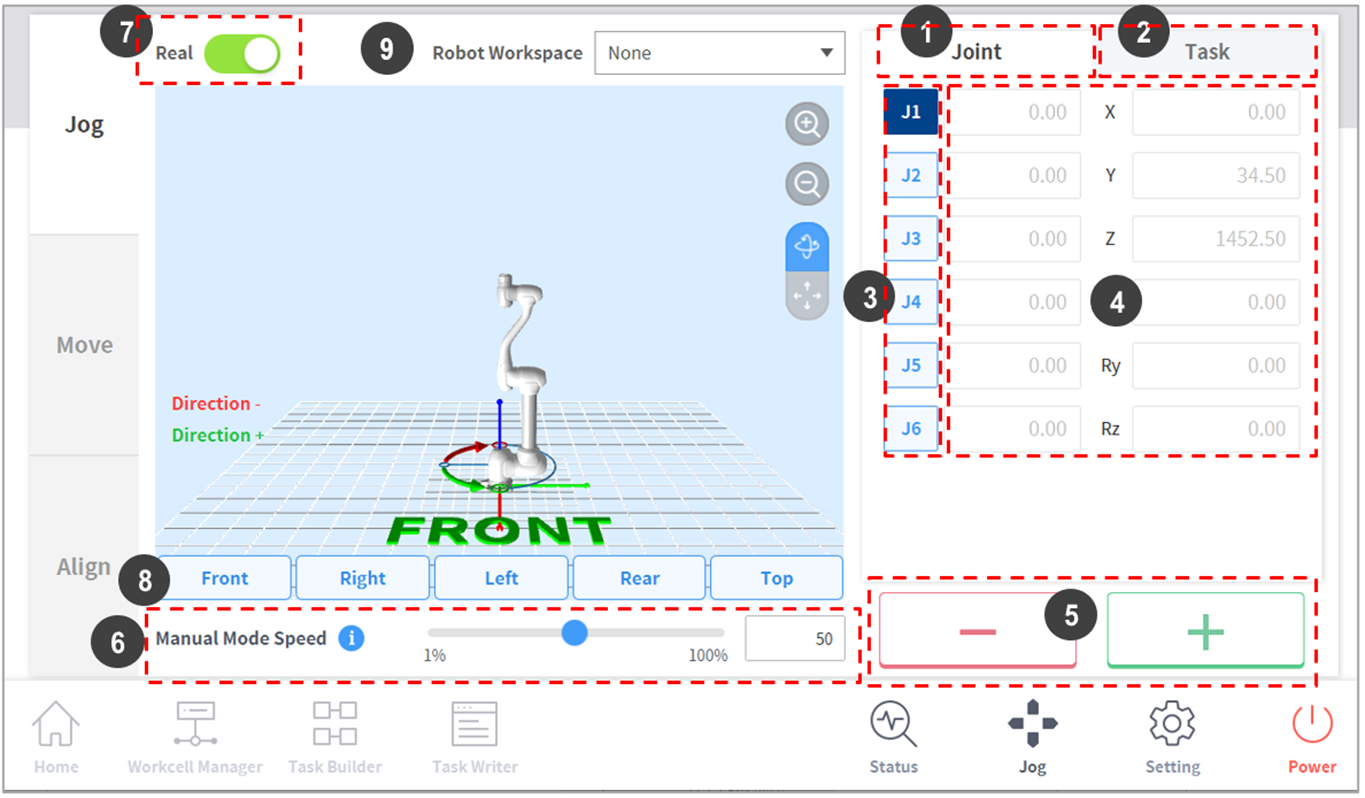
Jogscherm
De robot kan worden bewogen op basis van de huidige robotpositie op het tabblad Jog.
Nr. | Item | Omschrijving |
|---|---|---|
1 | Joint | Hiermee configureert u het gewricht als de referentiecoördinaat voor de jogmodus. |
2 | Task | Hiermee configureert u de taak als de referentiecoördinaat voor de jogmodus. |
3 | Select Axis | Selecteer de as die u in de jogmodus wilt verplaatsen.
|
4 | Coordinate Display | De coördinaten van de robot die op dat moment in de modus Jogwordt bediend, worden weergegeven. Als de robotpositie verandert door op de richtingsknop te drukken, verandert ook de coördinaat. |
5 | Direction | Hiermee verplaatst u de robot in de positieve of negatieve richting op de geselecteerde as. |
6 | Manual Mode Speed | Configureert de bewegingssnelheid van de robot in de handmatige modus. U kunt de snelheid aanpassen door de schuifregelaar te slepen. Als de schuifregelaar op 100% staat, is de hoogste corresponderende maximale gewrichtssnelheid op het tabblad Jog 30 graden/s en is de hoogste taaksnelheid 250 mm/s. Deze snelheid heeft invloed op de snelheid die wordt geregeld door de jog- en bewegingsknoppen. |
7 | Real Mode | Hier geeft u op of u de robot in de real-modus wilt bedienen als deze in de jogmodus staat.
|
8 | Simulator Alignment | Deze selecteert de uitlijningsrichting van de robot die in de simulator wordt weergegeven. Door op een van de richtingsknoppen te drukken, lijnt u de robot in de desbetreffende richting uit. |
9 | Robot Workspace | Hier vindt u informatie over de robotwerkruimte die in de Workcell Manager in de jobsimulator is geregistreerd. Druk op het vervolgkeuzemenu om de werkruimte te selecteren die u wilt weergeven. |


Opmerking
- TCP-snelheidslimiet: De hoogste bedieningssnelheid tijdens bediening met de jog- en bewegingsknop is conform het veiligheidsbeleid beperkt tot 250 mm/s.
- Als de robot stopt omdat de gewrichtshoeklimiet is bereikt of een botsing is gedetecteerd terwijl de robot in de jogmodus beweegt, stelt u de veiligheidsherstelmodus in en beweegt u de robot naar een positie binnen de gewrichtshoeklimiet. Raadpleeg “ Veiligheidsherstelmodus” voor meer informatie over de Veiligheidsherstelmodus.