
수동 조작 - 조그 배우기
MENDATORY NORMAL 15 MIN
- 조그(Jog) : 로봇의 관절 또는 TCP를 사용자가 선택한 관절축 또는 좌표축 기준으로 이동
- 이동(Move) : 로봇의 관절 또는 TCP를 사용자가 입력한 목표위치로 이동
- 정렬 (Align) : 사용자가 선택한 평면의 수직방향과 로봇 끝단의 좌표축 방향과 평행하게 로봇 끝단을 이동
로봇의 이동은 크게 두 가지로 구별 됩니다.
- 조인트 모션 : 각 관절을 선형으로 회전 이동
- 태스크 모션: 목표 위치를 향해 끝 단이 선형으로 이동
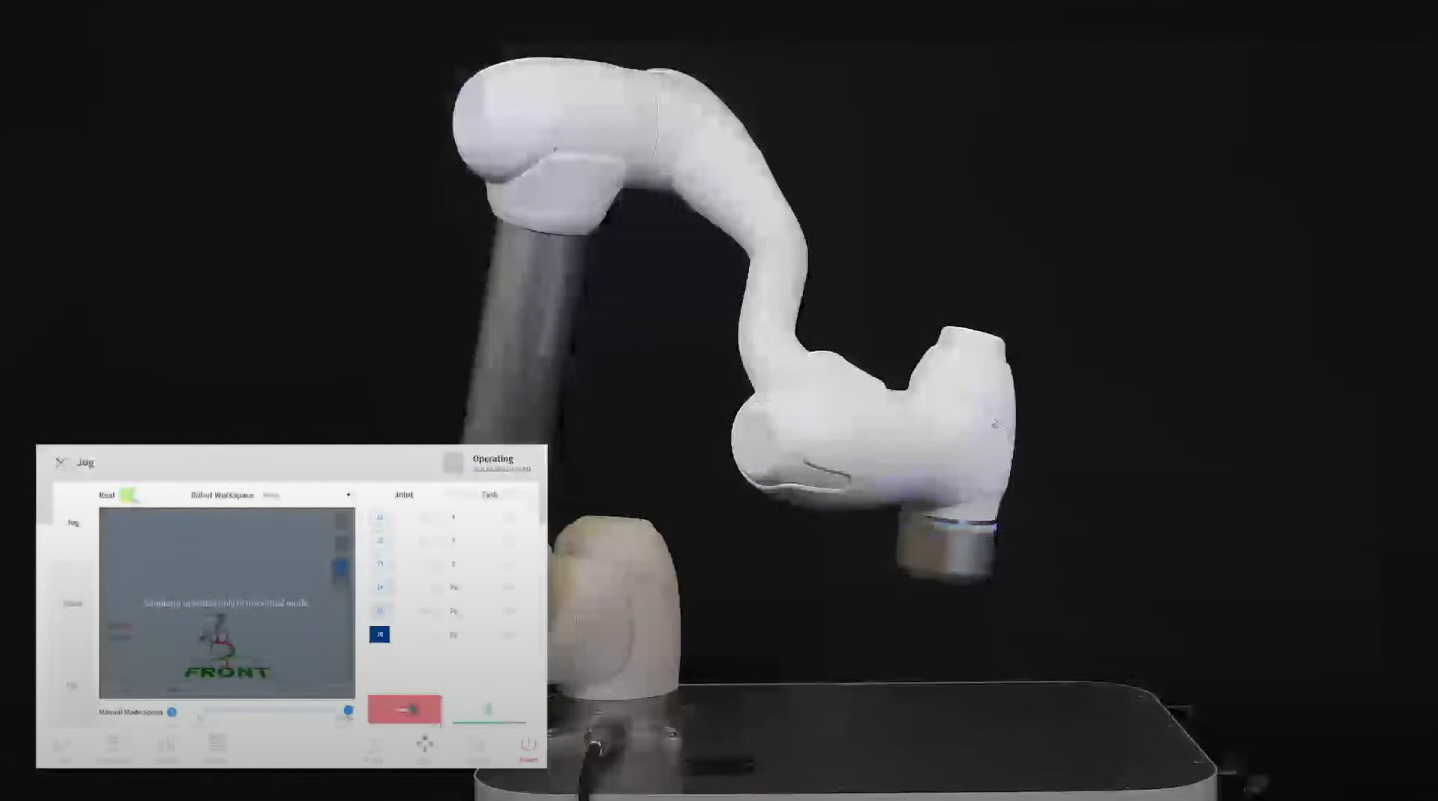
조그 화면에서 조인트 모션을 사용하여 로봇을 움직이는 방법은 다음과 같습니다.
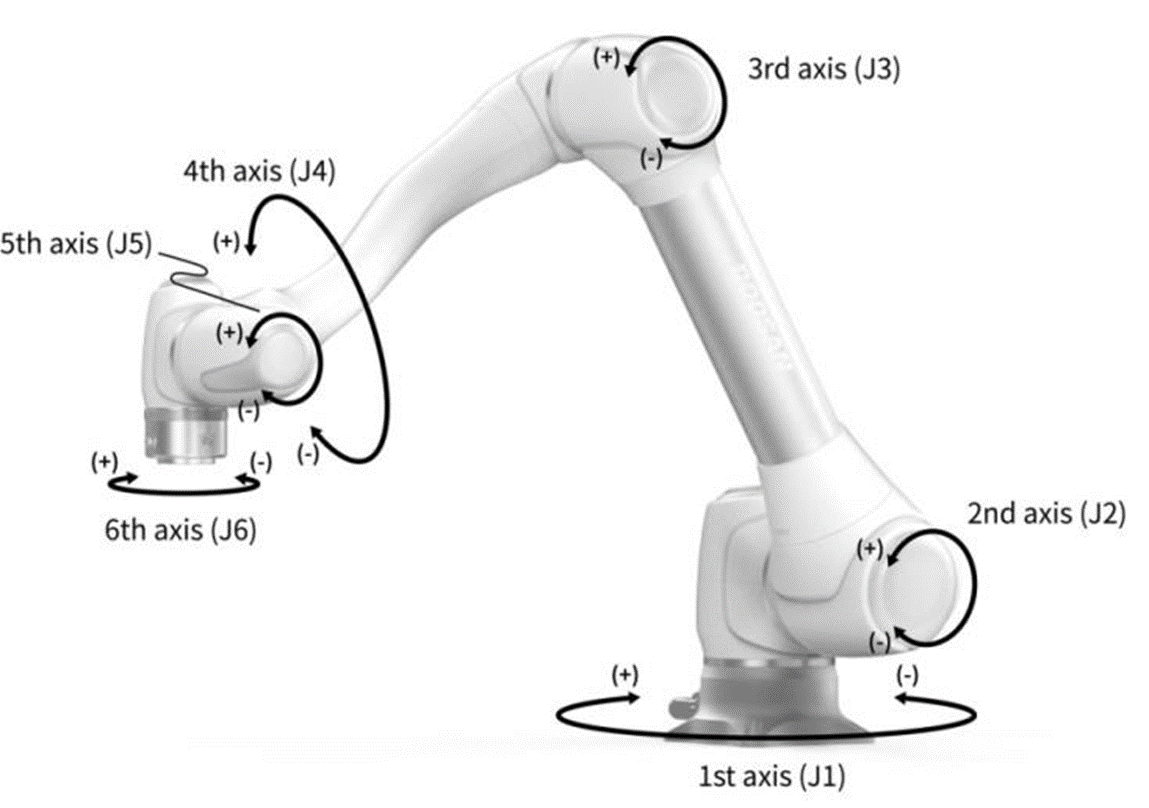
- 조인트 탭을 선택합니다.
- 움직이려는 축을 선택하십시오. 예를 들어 J1을 선택할 수 있습니다.
- +/- 버튼을 눌러서 로봇을 움직일 수 있습니다. +/- 버튼을 누르고 있는 동안 로봇이 움직이며 화면에는 현재 위치가 실시간으로 표시됩니다.
조그 화면에서 태스크 모션을 사용하여 로봇을 움직이는 방법은 다음과 같습니다.
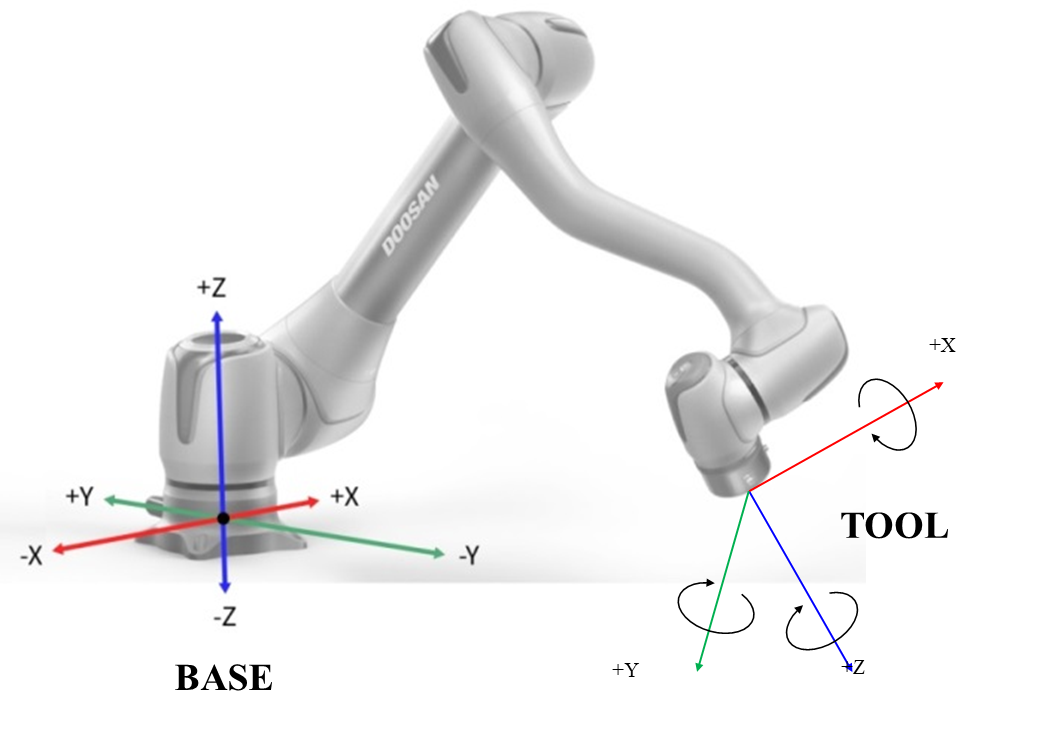
- 기준 좌표계를 선택합니다. BASE 좌표계 또는 TOOL 좌표계를 기준으로 로봇을 움직일 수 있습니다.
- 움직이려는 방향을 선택합니다. 예를 들어 X축을 선택할 수 있습니다.
- +/- 버튼을 눌러서 로봇을 움직일 수 있습니다. +/- 버튼을 누르고 있는 동안 로봇이 움직이며 화면에는 현재 위치가 실시간으로 표시됩니다.
조그 이동에 대한 자세한 설명 및 이동과 정렬에 대한 설명은 각각 조그 화면 및 이동 화면 과 정렬 화면 을 참조하십시오.
알아두기
- 조그 화면 좌측 상단의 실제 모드 토글 스위치를 끄면 조그 화면 좌측의 가상 화면에서만 로봇이 움직이게 됩니다. 실제 모드 토글 스위치를 켜면 실제 로봇이 움직이게 됩니다.