
이동 화면
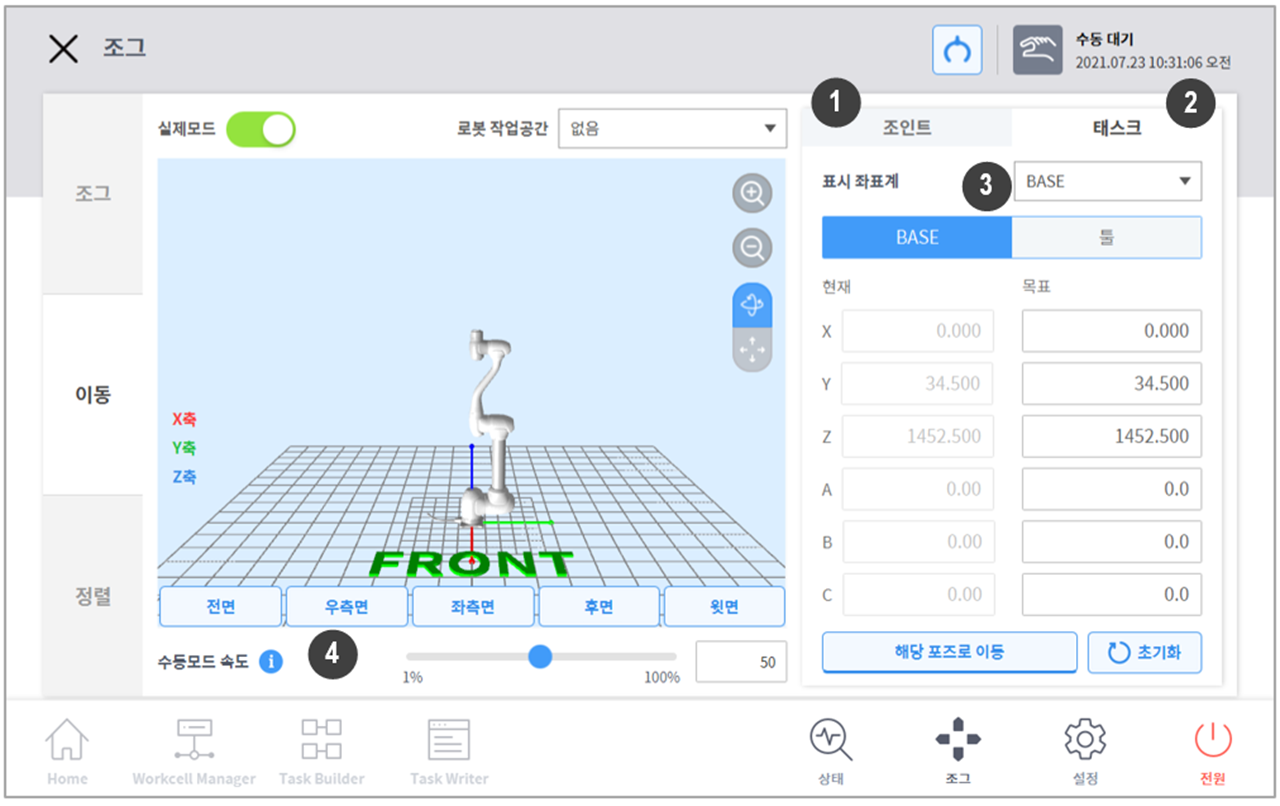
이동 화면에서는 목표 각도/좌표로 로봇을 이동할 수 있습니다. 로봇이 이동해야 할 좌표를 사전에 알고 있거나 소수점 단위까지 미세한 이동이 필요한 경우 해당 좌표를 입력하여 이동할 수 있습니다.
번호 | 항목 | 설명 |
1 | 조인트 | 로봇을 조그로 이동할 때 사용할 기준 좌표를 설정합니다. |
2 | 태스크 | 로봇을 조그로 이동할 때 사용할 기준 각도 좌표를 설정합니다. |
3 | 기준점 설정 | 태스크 좌표계를 정렬할 기준점을 설정합니다.
|
4 | 수동모드 속도 | 수동모드에서의 로봇 이동 속도를 설정합니다. 슬라이더 포인터를 드래그하여 속도를 조절할 수 있습니다. 슬라이더 포인터가 100%라면, 이동 탭에서는 대응하는 조인트 최고 속도는 30 deg/s이며, 태스크의 최고 속도는 250 mm/s입니다. 이 속도는 조그 및 이동 버튼의 동작에 영향을 줍니다. |