
조그 화면
조그 화면에서는 현재 로봇 위치를 기준으로 탐색할 수 있습니다.
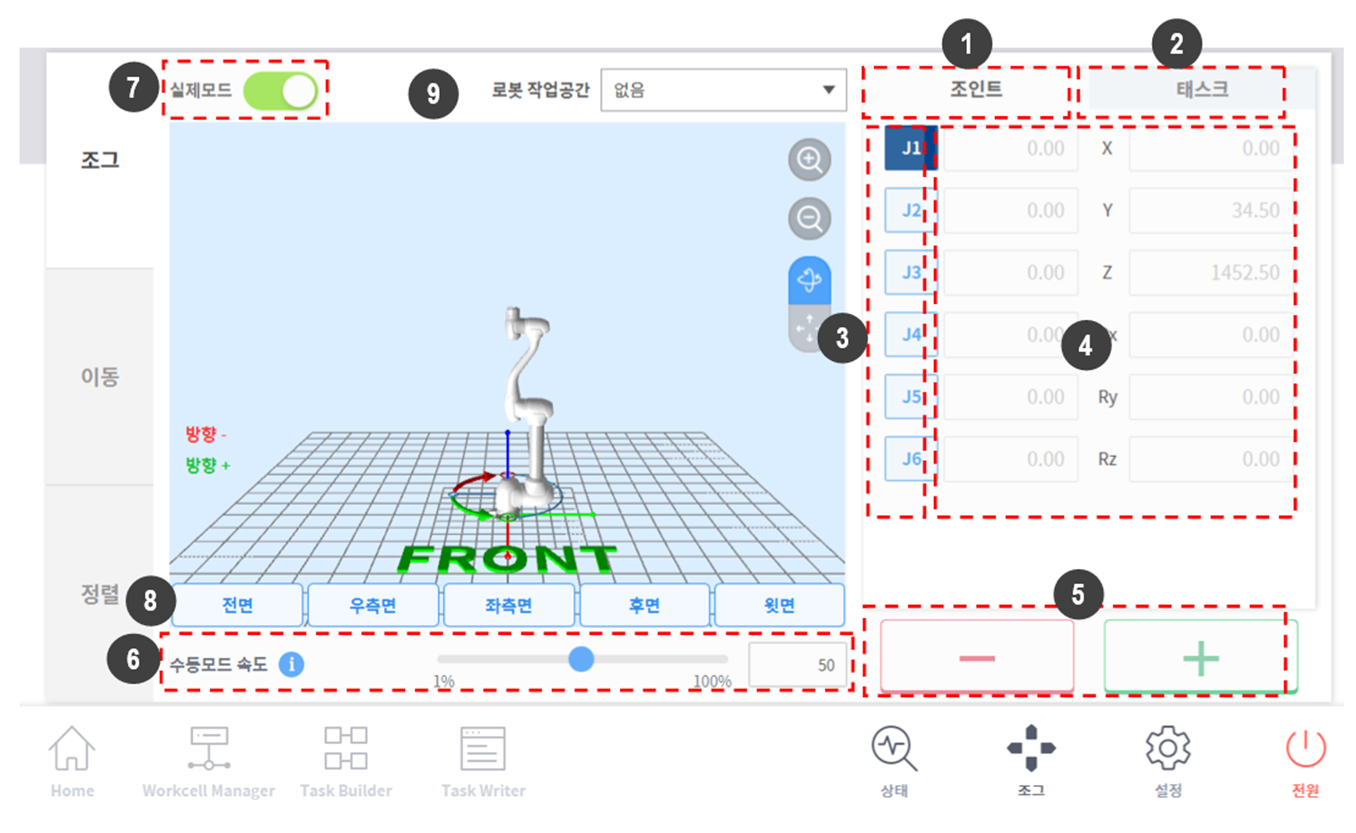
번호 | 항목 | 설명 |
1 | 조인트 | 조인트를 조그 모드의 기준 좌표로 설정합니다. |
2 | 태스크 | 태스크를 조그 모드의 기준 좌표로 설정합니다. |
3 | 축 선택 | 조그 모드로 이동할 축을 선택합니다.
|
4 | 좌표 표시 | 현재 조그 모드로 사용 중인 로봇의 위치 좌표가 표시됩니다. 방향 버튼을 눌러 로봇의 위치가 변경되면 좌표값도 함께 변경됩니다. |
5 | 방향 | 선택한 축의 + 또는 – 방향으로 로봇을 이동합니다. |
6 | 수동모드 속도 | 수동 모드에서의 로봇 이동 속도를 설정합니다. 슬라이더 포인터를 드래그하여 속도를 조절할 수 있습니다. 슬라이더 포인터가 100%라면, 조그 탭에서는 대응하는 조인트의 최고 속도는 30 deg/s이며, 태스크의 최고 속도는 250 mm/s입니다. 이 속도는 조그 및 이동 버튼으로 로봇을 조작하는 속도에만 영향을 줍니다. |
7 | 실제 모드 | 조그 모드 사용 시 실제 로봇의 작동 여부를 설정합니다.
|
8 | 시뮬레이터 정렬 | 시뮬레이터에 표시된 로봇의 정렬 방향을 선택합니다. 각 방향 버튼을 누르면 로봇이 해당하는 방향으로 정렬합니다. |
9 | 로봇 작업공간 | 워크셀 매니저에 등록된 로봇 작업 공간 정보를 Jog 시뮬레이터에 표시합니다. 드롭다운 메뉴를 눌러 표시할 작업 공간을 선택합니다. |


알아두기
- TCP 속도 제한: 안전 정책에 따라 조그 및 이동 버튼 사용 중에는 최고 속도가 250 mm/s로 제한됩니다.
- 조그 모드로 로봇을 이동 중 조인트 리미트 초과 혹은 충돌이 감지되어 로봇이 멈춘 경우 안전복구 모드로 진입하여 조인트 각도 제한 내 로봇이 위치하도록 로봇을 이동하십시오. 안전복구 모드에 대한 설명은 안전복구 모드 사용하기를 참조하십시오.