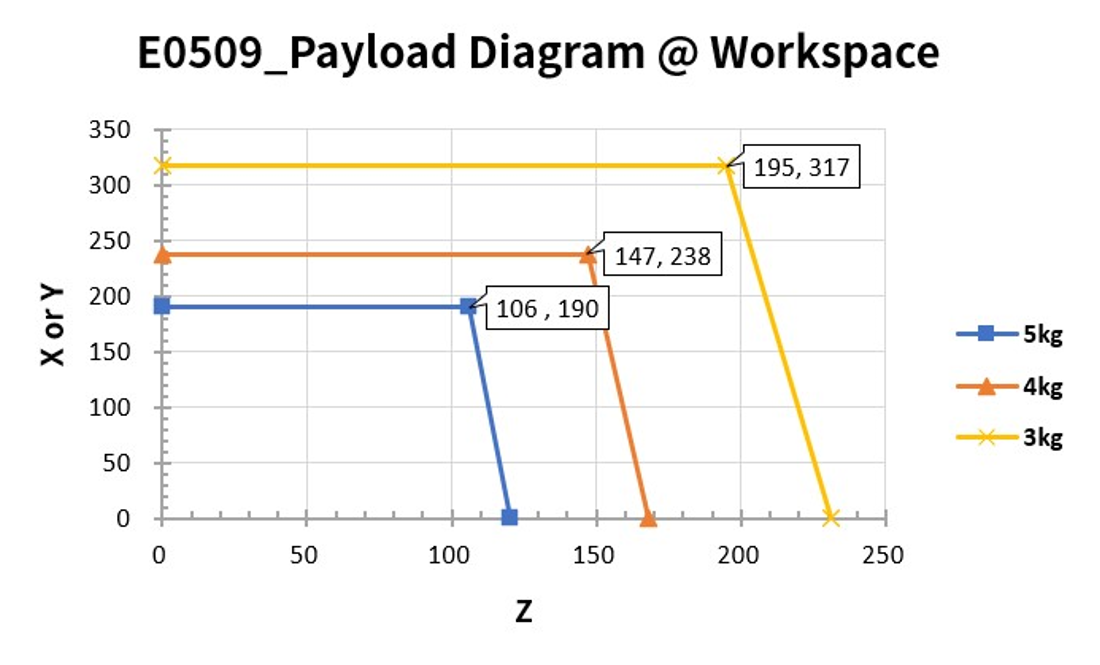
작업 영역 내에서 로봇의 최대 가반하중은 무게 중심 거리에 따라 달라집니다. 거리별 가반 하중은 다음과 같습니다.
본 부하 다이어그램은 작은 툴 부하체적을 가정합니다. 동일한 중량의 툴이라도 큰 부하 체적을 갖는 이 경우 툴의 무게중심은 위의 가반하중보다 더 제한될 수 있으며 이 경우 진동 등이 발생할 가능성이 있습니다.
E0509
허용 모멘트 및 관성(Inertia)
로봇의 J4~J6의 허용 모멘트 및 관성(Inertia) 정보는 아래와 같습니다.
|
모델명
|
J4 |
J5 |
J6
|
|||
|---|---|---|---|---|---|---|
|
허용 모멘트 |
관성 (Inertia) |
허용 모멘트 |
관성 (Inertia) |
허용 모멘트 |
관성 (Inertia) |
|
|
E0509 |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |
36 Nm |
1.6 kg㎡ |