
move_spiral()
기능
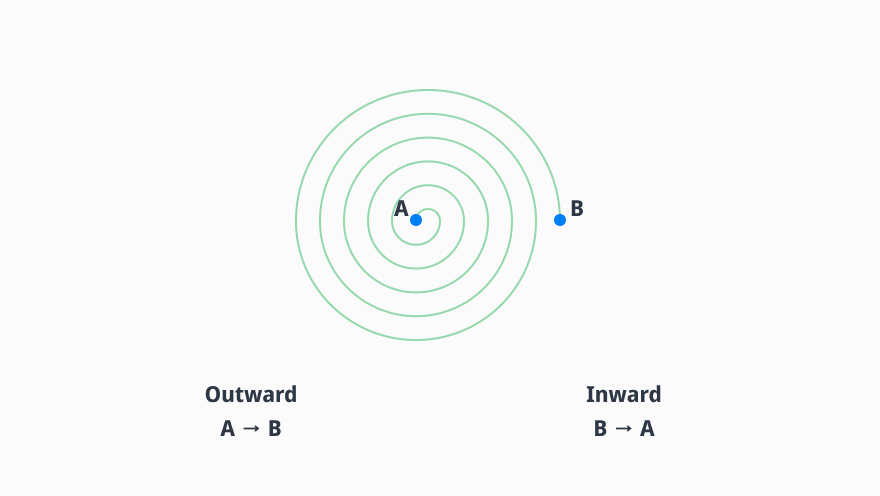
지정한 좌표계(ref) 상에서 회전 방향(rad_dir)에 따라 현재 위치를 나선의 중심점으로 하여 반경 방향으로 외향 이동하는 원추 나선 궤적의 모션을 수행하거나, 목표점을 나선의 중심점으로 하여 반경 방향으로 내향 이동하는 원추 나선 궤적의 모션을 수행합니다. 목표점은 X,Y,Z 좌표 값 또는 최대 반경(rmax)과 이동거리(lmax)로 정의할 수 있습니다. 지정축(axis)에 수직한 평면 위에서 입력한 회전수(rev)만큼 회전하는 나선 궤적을 따릅니다.
인수
| 인수명 | 자료형 | 기본값 | 범위 | 설명 |
|---|---|---|---|---|
rev | float | 10 | rev > 0 | 총 회전수 [revolution] |
rmax | float | None | rmax > 0 | spiral 최종 반경 [mm] |
lmax | float | 0 | axis 방향으로 이동하는 거리 [mm] | |
vel (v) | float | None | velocity | |
acc (a) | float | None | acceleration | |
time (t) | float | None | time ≥ 0 | 총 수행시간 <sec> |
axis | int | DR_AXIS_Z | - | axis
|
ref | Int | DR_TOOL | - | reference coordinate
|
| pos | posx | None | posx 또는 position list (X,Y,Z) | |
| list(float[3]) | ||||
| list(float[6]) | ||||
| mod | int | DR_MV_MOD_ABS | 이동 기준
| |
| rad_dir | int | DR_SPIRAL_OUTWARD | 반경 방향
| |
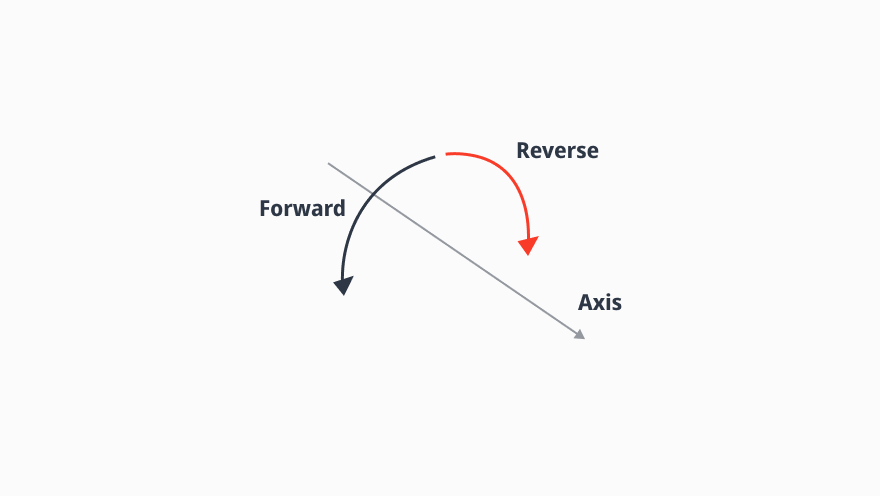
| rot_dir | int | DR_ROT_FORWARD | 회전 방향
| |
| radius(r) | float | None | Blending 시 radius | |
| ra | int | DR_MV_RA_DUPLICATE | Reactive motion mode
|
알아두기
- 단축 인수를 지원합니다. (v:vel, a:acc, t:time)
- rev는 spiral 모션의 총 회전수를 의미합니다.
- rmax는 spiral 모션의 최대 반경을 의미합니다.
- lmax는 모션 동안 axis 방향으로 병진하는 거리를 의미합니다. 단, 음수인 경우 –axis 방향 병진합니다.
- vel은 spiral 모션의 이동 속도를 의미합니다.
- vel이 None인 경우, _global_velx의 첫째 값(병진 속도)이 적용됩니다. (_global_velx 초기값은 0.0이며, set_velx에 의해 설정 가능)
- acc는 spiral 모션의 이동 가속도를 의미합니다.
- acc가 None인 경우, _global_accx 첫째 값(병진 가속도)이 적용됩니다. (_global_accx 초깃값은 0.0이며, set_accx에 의해 설정 가능)
- time을 지정할 경우 vel, acc를 무시하고 time 기준으로 처리됩니다.
- time이 None인 경우 0으로 처리됩니다.
- axis는 Spiral 모션이 정의하는 평면에 수직인 축을 정의합니다.
- ref는 spiral 모션이 정의하는 기준 좌표계를 의미합니다.
rad_dir 은 Spiral의 반경 방향의 회전 방향을 의미합니다.
- rot_dir 은 Spiral의 회전 축을 기준으로 한 회전 방향을 의미합니다.
- radius가 None인 경우, 블렌딩 구간인 경우는 blending radius로 처리되며 아닌 경우는 0으로 처리됩니다.
진행 중인 모션(선행모션)이 종료되지 않은 상태에서 새로운 모션명령(후행모션)이 실행되면 선행모션과 후행모션이 부드럽게 연결됩니다(모션 블렌딩 기능).이 때 선행모션의 목표점을 유지하거나 취소할 수 있도록 결정하는 옵션ra를 후행모션에 설정할 수 있습니다. (유지: ra= DR_MV_RA_DUPLICATE /취소: ra= DR_MV_RA_OVERRIDE)예를 들어 아래의 그림에서 목표점이 Target#1인 선행모션의 진행 중 ‘2nd motion event’지점에서 후행모션이 실행된 경우 후행모션의 옵션ra= DR_MV_RA_DUPLICATE이면 선행모션의 목표점을 유지하므로 주황색 궤적과 같이움직이며ra= DR_MV_RA_OVERRIDE이면 선행모션의 목표점을
취소하므로 초록색 궤적과 같이 움직이게 됩니다.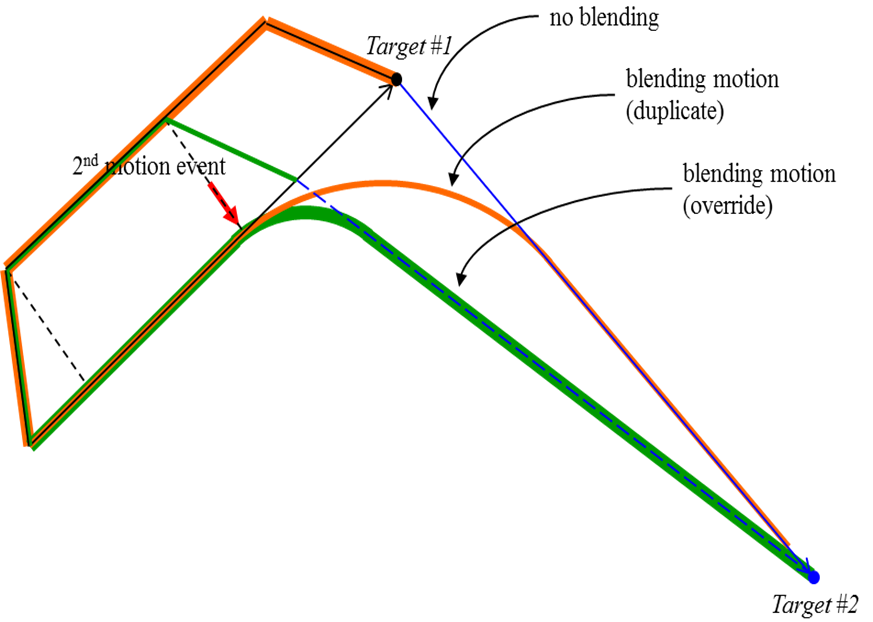
주의
- 경로 생성 시 Spiral 경로에 의한 회전각 가속도를 연산하여 값이 큰 경우 안정적인 모션을 위하여 에러가 발생할 수 있습니다.
이 경우 vel, acc 값을 작게 또는 time 값을 크게 조정하는 것을 권장합니다.
리턴
| 값 | 설명 |
|---|---|
0 | 성공 |
음수값 | 오류 |
예외
| 예외 | 설명 |
|---|---|
DR_Error (DR_ERROR_TYPE) | 인수들의 데이터형 오류 시 |
DR_Error (DR_ERROR_VALUE) | 인수의 값이 유효하지 않을 시 |
DR_Error (DR_ERROR_RUNTIME) | C Extension 모듈 에러 발생 시 |
DR_Error (DR_ERROR_STOP) | 프로그램 강제 종료 시 |
예제
# Model: M1013
J00 = posj(0,0,90,0,90,0)
P1 = [559,34.5,651.5]
P2 = [579, 65, 641.5]
D1 = [20,0,10]
D2 = [-20,0,-10]
movej(J00,vel=100,acc=100) # Move to Initial Poisition
# Max Radius with Blending
move_spiral(rev=5,rmax=20.0,lmax=-10,v=40,a=40,axis=DR_AXIS_Z,ref=DR_TOOL,rad_dir=DR_SPIRAL_OUTWARD, rot_dir=DR_ROT_FORWARD, r=20)
move_spiral(rev=5,rmax=20.0,lmax=-10,v=40,a=40,axis=DR_AXIS_Z,ref=DR_TOOL,rad_dir=DR_SPIRAL_INWARD, rot_dir=DR_ROT_FORWARD)
# Coordinate values with Blending
move_spiral(rev=5,pos=P2,v=40,a=40,axis=DR_AXIS_Z,ref=DR_BASE,rad_dir=DR_SPIRAL_OUTWARD, rot_dir=DR_ROT_FORWARD, r=20)
move_spiral(rev=5,pos=P1,v=40,a=40,axis=DR_AXIS_Z,ref=DR_BASE,rad_dir=DR_SPIRAL_INWARD, rot_dir=DR_ROT_FORWARD)
# Relative motion with Blending
move_spiral(rev=5,pos=D1,mod=DR_MV_MOD_REL,v=40,a=40,axis=DR_AXIS_Z,ref=DR_BASE,rad_dir=DR_SPIRAL_OUTWARD, rot_dir=DR_ROT_FORWARD, r=20)
move_spiral(rev=5,pos=D2,mod=DR_MV_MOD_REL,v=40,a=40,axis=DR_AXIS_Z,ref=DR_BASE,rad_dir=DR_SPIRAL_INWARD, rot_dir=DR_ROT_FORWARD)