
복구 동작
오류 상황에서 로봇 자세를 변경하려면 메인 메뉴에서 컨트롤을 선택한 후 복구 모드 버튼을 클릭하십시오.

버튼을 클릭하면 복구 모션 창이 팝업 됩니다. 그리고 복구 모드 시작 버튼을 클릭하면 서보 온이 되고 제어기 상태가 복구 모드로 변경됩니다. 그리고 각 컨트롤이 활성화 되어 제어를 할 수 있게 됩니다.
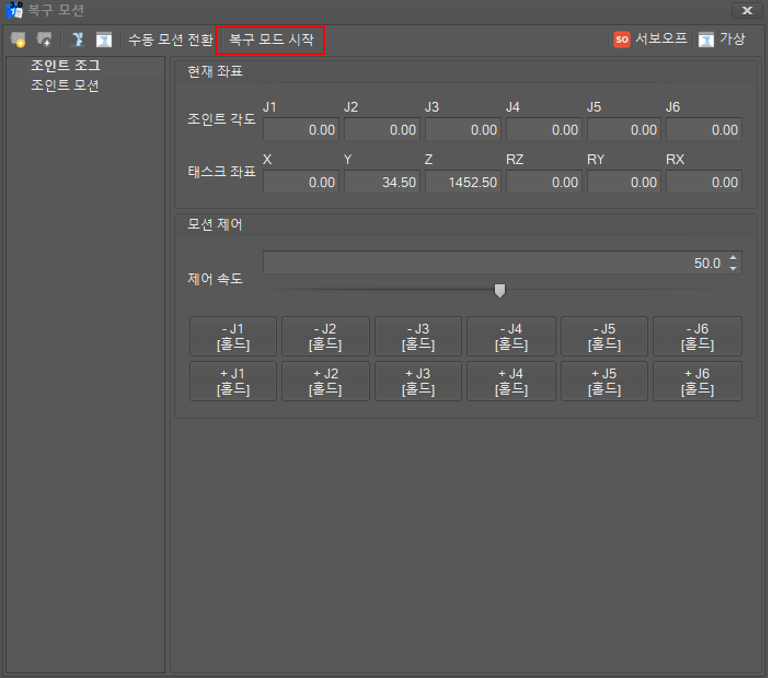
복구 동작은 수동 모션 중 조인트 조그와 조인트 모션을 지원합니다. 사용법은 수동 모션 사용법과 동일합니다. 조인트 조그 및 조인트 모션에 대해서는 조인트 조그 and 조인트 모션 을 참고하십시오.
주의
복구 모드 시에는 위치 위반 검사가 수행되지 않습니다. 따라서 로봇 조인트를 하드웨어 한계까지 움직일 수 있습니다.
3D 뷰어 상에서 위치 위반이 있는지 여부를 육안으로 확인 할 수 있습니다. 위치 위반이 없는 경우 수동 모션 전환 버튼을 클릭하거나 복구 모션 창을 닫아 수동 모션으로 돌아갑니다. 그러면 시스템은 “수동 대기” 상태가 됩니다.
