
그리퍼 WCI&Skill 제작 튜토리얼 소개
튜토리얼 소개
WCI(Workcell Item)과 Skill을 만드는 간단한 튜토리얼을 소개합니다. 튜토리얼에서는 디지털 I/O를 사용하는 복동식 그리퍼를 WCI로 생성하고 Skill을 추가하는 방법을 설명합니다.

튜토리얼을 마친 후, 다음과 같은 것들을 할 수 있습니다.
- WCI Writer를 사용하여 WCI를 생성할 수 있습니다.
- Grobal Function & Variable Writer를 사용하여 전역 함수와 변수를 생성할 수 있습니다.
- Skill Writer를 사용하여 Skill을 생성할 수 있습니다.
- 티치 펜던트에서 워크셀 매니저에서 사용할 수 있는 WCI/Skill 설치 파일(*.dr3)을 생성할 수 있습니다.
본 매뉴얼에서는 복동식 그리퍼 외에도 '단동식 툴 WCI&Skill 제작하기' 예제가 포함되어 있습니다.
그리퍼 WCI 생성하기 튜토리얼 소개
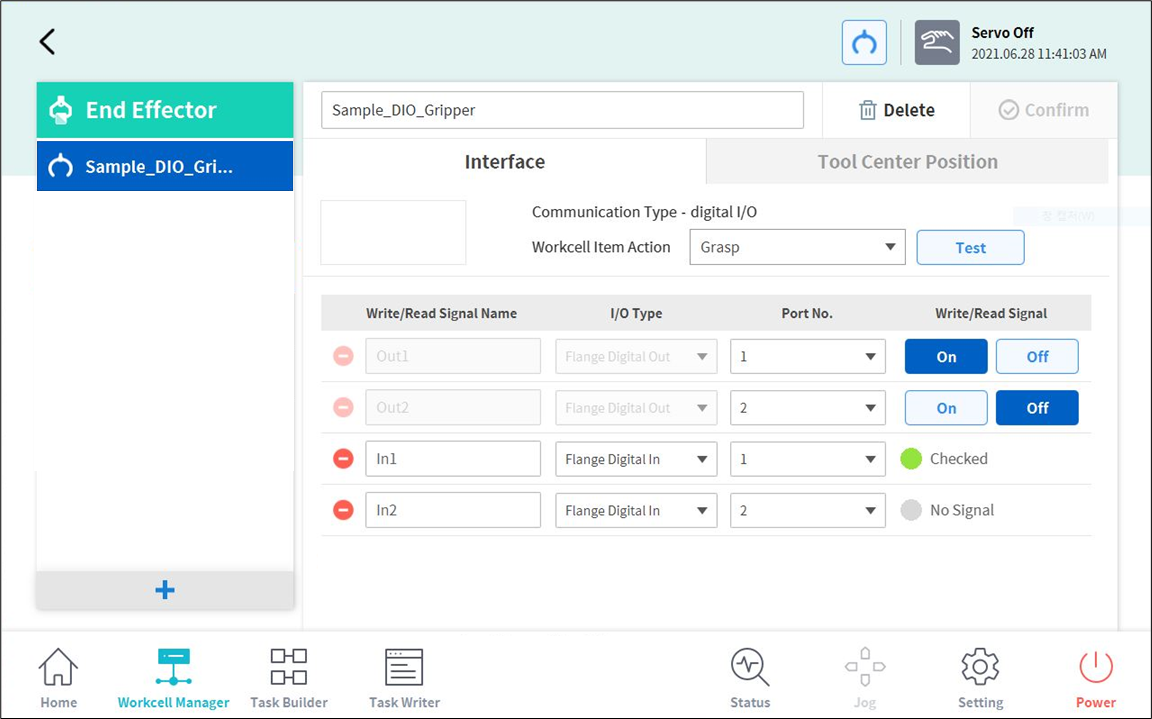
플랜지에 디지털 I/O 통신 방식으로 연결되는 복동식 그리퍼를 WCI로 만듭니다.
- 그리퍼의 기본 정보를 입력합니다.
- 디지털 I/O 통신 방식을 등록하고 UI 화면을 구성합니다.
- 그리퍼의 필수 Action인 'Grasp'와 'Release' 추가합니다.
- 결과물로 그리퍼 WCI를 만들 수 있습니다. 티치 펜던트에서 그리퍼 WCI의 UI는 아래와 같이 보여집니다.
그리퍼 Skill(Pick&Place) 생성하기 튜토리얼 소개
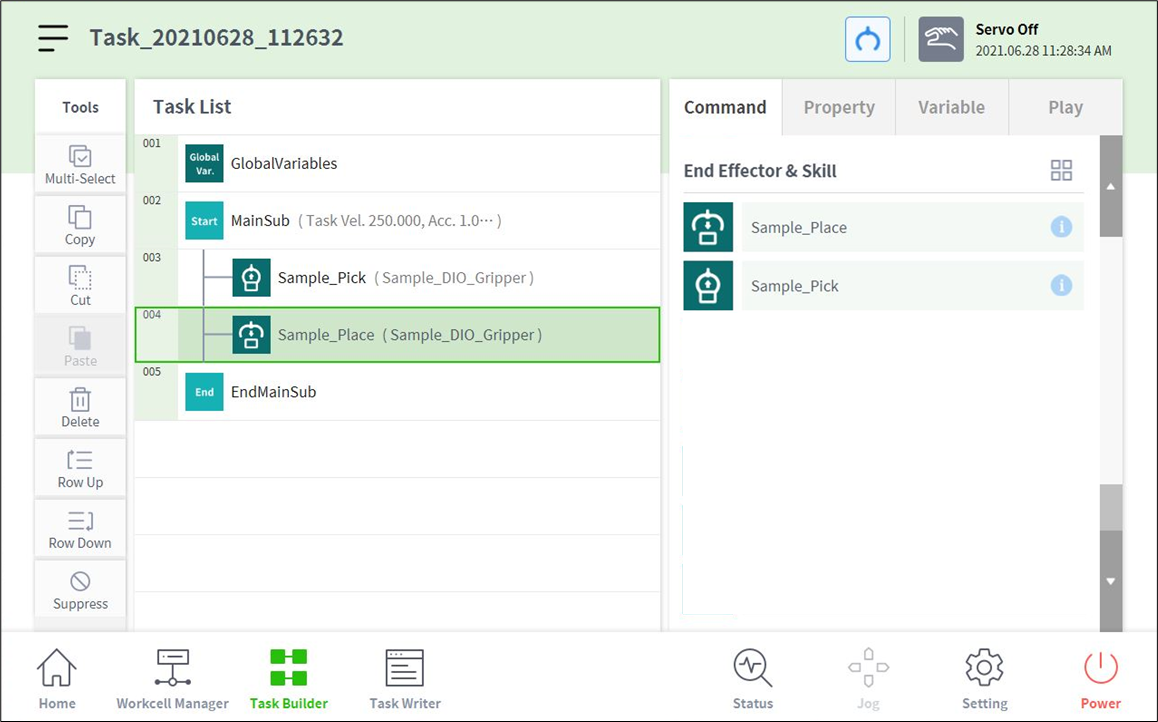
그리퍼의 Pick Skill과 Place Skill을 만듭니다.
- Skill의 기본 정보를 입력합니다.
- Pick/Place Skill 추가합니다.
- 로봇 모션 생성하고 추가합니다.
- I/O Action 생성하고 추가합니다.
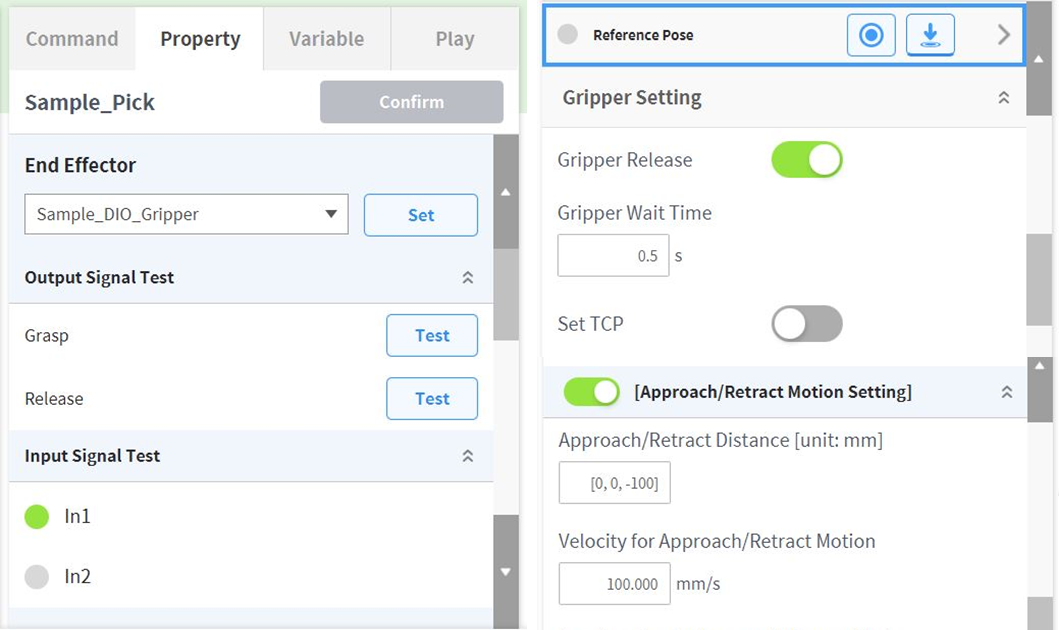
- 결과물로 그리퍼 WCI를 만들 수 있습니다. 티치 펜던트에서 그리퍼 WCI Skill의 UI는 아래와 같이 보여집니다.
두산 로보틱스에서는 이 튜토리얼에 대한 Sample을 App Builder 웹 페이지에서 제공하고 있습니다. 다음의 Sample을 복사하여 간단히 복동식 그리퍼 WCI와 Pick&Place Skill을 제작할 수 있습니다.
WCI Writer
- Sample_DIO_Gripper

Skill Writer
- Sample_Pick_v2
- Sample_Place_v2
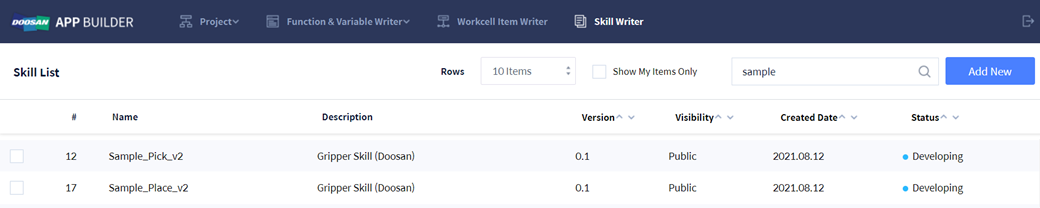
Sample의 버전에 따라 이 예제의 설명과 Sample로 제공되는 WCI와 Skill의 내용이 동일하지 않을 수 있습니다.